介入手术机器人的递送系统的制作方法
本申请涉及医疗器械,特别涉及一种介入手术机器人的递送系统。
背景技术:
1、介入手术是利用现代高科技手段进行的一种微创性治疗方式,就是在医学影像设备的引导下,将特制的长直介入耗材(例如导管、导丝、支架等)等精密器械引入体内,从而对体内病态进行诊断和局部治疗。
2、目前,介入手术的介入手术机器人的递送系统单次只能递送一套导管导丝,即单个导丝套设在导管内,并且导丝和导管通常都设置在同一个驱动模块中,导丝的递送往往只能依靠滚轮的推送,这种设置方式的递送精度较差,而且很难实现更多个长直介入耗材的推送,手术过程中可能还需要进行介入耗材的更换,导致介入手术的操作复杂度高、手术时间长。
3、有鉴于此,有必要改进介入手术机器人的递送系统。
技术实现思路
1、为解决现有的介入手术的介入手术机器人的递送系统的结构设计不佳而导致介入手术操作复杂、手术时间长的问题,本申请提供一种介入手术机器人的递送系统。
2、该介入手术机器人的递送系统包括多个递送单元,各递送单元沿同一递送方向依次布置且能够分别递送沿递送方向依次同轴套接的多个长直介入耗材。
3、介入手术机器人的递送系统的一种实施方式,每个递送单元均设置第一递送机构;
4、每个递送单元均在其第一递送机构的远离介入端的一侧设置第二递送机构,或者,除最远离介入端的递送单元外的其他所有递送单元均在其第一递送机构的远离介入端的一侧设置第二递送机构。
5、介入手术机器人的递送系统的一种实施方式,所述递送系统还包括驱动机构,最靠近介入端的递送单元的第一递送机构固定设置,驱动机构设置成能够驱动最靠近介入端的递送单元的第二递送机构和其他所有递送单元的所有递送机构沿递送方向移动。
6、介入手术机器人的递送系统的一种实施方式,同一递送单元的第一递送机构和第二递送机构由非同一个驱动机构驱动着沿递送方向移动,以沿递送方向实现异步移动;并且/或者,
7、前一递送单元的第二递送机构和与之相邻的后一递送单元的第一递送机构由同一个驱动机构驱动着沿递送方向移动,以沿递送方向实现同步移动。
8、介入手术机器人的递送系统的一种实施方式,所述第一递送机构中设置有介入耗材牵引组件,所述介入耗材牵引组件设置成能够牵引相应的长直介入耗材运动,所述第二递送机构中设置有介入耗材推动组件,所述介入耗材推动组件设置成能够配合相应的介入耗材牵引组件的牵引动作而推动相应的长直介入耗材运动。
9、介入手术机器人的递送系统的一种实施方式,每个递送机构均包括驱动部、执行部和壳体组件,所述壳体组件包括用于容置所述驱动部的驱动壳体和用于容置所述执行部的执行壳体,所述驱动壳体和所述执行壳体之间设有传动轴孔,所述驱动部和所述执行部通过穿设在所述传动轴孔中的传动轴传动连接。
10、介入手术机器人的递送系统的一种实施方式,同一递送机构的所述驱动壳体和所述执行壳体,一者设有凹槽,一者设有凸起,通过所述凹槽和所述凸起插接;并且/或者,
11、前一递送单元的第二递送机构和与之相邻的后一递送单元的第一递送机构共用同一壳体组件。
12、介入手术机器人的递送系统的一种实施方式,所述驱动机构包括电机和能将所述电机的输出轴的旋转运动转化为递送机构的直线移动的换向组件。
13、介入手术机器人的递送系统的一种实施方式,所述换向组件为齿轮齿条组件,齿条沿递送方向延伸,各所述驱动机构的齿条为同一齿条;或者,
14、所述换向组件为丝杠螺母组件,丝杠沿递送方向延伸,各所述驱动机构的丝杠为同一丝杠。
15、介入手术机器人的递送系统的一种实施方式,所述递送系统还包括导轨,所述导轨沿递送方向延伸,用于导引递送机构沿递送方向移动。
16、介入手术机器人的递送系统的一种实施方式,所述递送系统还包括测距机构,每个测距机构对应测量同一个递送单元的第一递送机构和第二递送机构在递送方向上的距离。
17、介入手术机器人的递送系统的一种实施方式,所述测距机构为激光传感测距机构,所述激光传感测距机构包括激光传感器和测距挡板;所述激光传感器和测距挡板分别连于两个递送机构,所述激光传感器发出的测量光能够沿递送方向照射到所述测距挡板上。
18、由于本申请设有多个递送单元,且每个递送单元均能够单独递送一个长直介入耗材,所以单次能够组装上多个长直介入耗材,又由于本申请的多个递送单元沿同一递送方向依次布置,所以能分别递送沿递送方向依次同轴套接的多个长直介入耗材,因此,本申请单次能够连续递送多个长直介入耗材,相比现有的递送系统,递送效率更高,更利于降低介入手术的操作复杂度和缩短介入手术的时长。
技术特征:
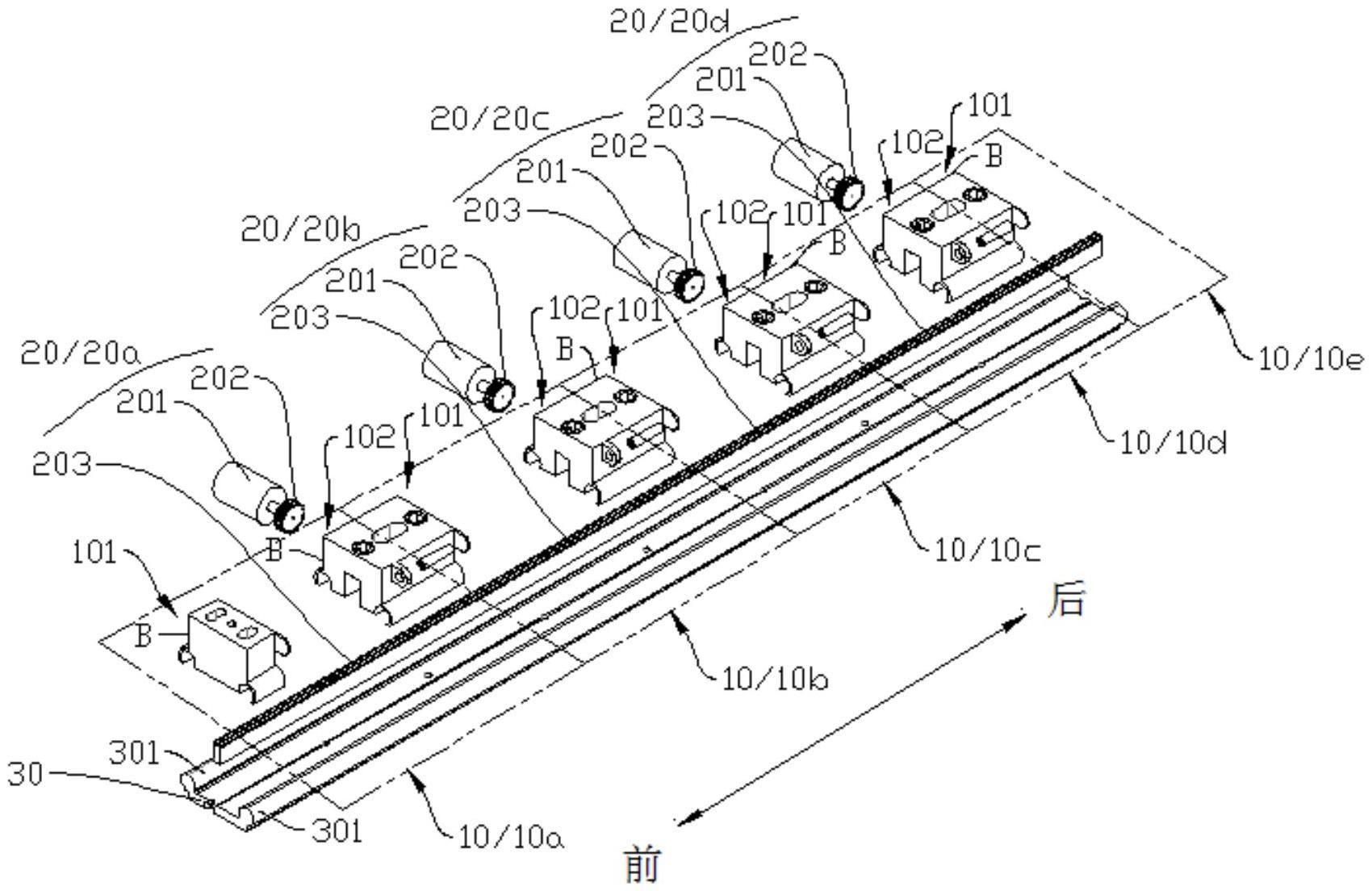
1.一种介入手术机器人的递送系统,其特征在于,所述递送系统包括多个递送单元(10),各递送单元(10)沿同一递送方向依次布置且能够分别递送沿递送方向依次同轴套接的多个长直介入耗材(60)。
2.根据权利要求1所述的介入手术机器人的递送系统,其特征在于,每个递送单元(10)均设置第一递送机构(101);
3.根据权利要求2所述的介入手术机器人的递送系统,其特征在于,所述递送系统还包括驱动机构(20),最靠近介入端的递送单元(10)的第一递送机构(101)固定设置,驱动机构(20)设置成能够驱动最靠近介入端的递送单元(10)的第二递送机构(102)和其他所有递送单元(10)的所有递送机构沿递送方向移动。
4.根据权利要求3所述的介入手术机器人的递送系统,其特征在于,同一递送单元(10)的第一递送机构(101)和第二递送机构(102)由非同一个驱动机构(20)驱动着沿递送方向移动,以沿递送方向实现异步移动;并且/或者,
5.根据权利要求2所述的介入手术机器人的递送系统,其特征在于,所述第一递送机构(101)中设置有介入耗材牵引组件,所述介入耗材牵引组件设置成能够牵引相应的长直介入耗材(60)运动,所述第二递送机构(102)中设置有介入耗材推动组件,所述介入耗材推动组件设置成能够配合相应的介入耗材牵引组件的牵引动作而推动相应的长直介入耗材(60)运动。
6.根据权利要求1-5任意一项所述的介入手术机器人的递送系统,其特征在于,每个递送机构均包括驱动部、执行部和壳体组件,所述壳体组件包括用于容置所述驱动部的驱动壳体(b)和用于容置所述执行部的执行壳体(a),所述驱动壳体(b)和所述执行壳体(a)之间设有传动轴孔(f),所述驱动部和所述执行部通过穿设在所述传动轴孔(f)中的传动轴(e)传动连接。
7.根据权利要求6所述的介入手术机器人的递送系统,其特征在于,同一递送机构的所述驱动壳体(b)和所述执行壳体(a),一者设有凹槽(d),一者设有凸起(c),通过所述凹槽(d)和所述凸起(c)插接;并且/或者,
8.根据权利要求3或4所述的介入手术机器人的递送系统,其特征在于,所述驱动机构(20)包括电机(201)和能将所述电机(201)的输出轴的旋转运动转化为递送机构的直线移动的换向组件。
9.根据权利要求8所述的介入手术机器人的递送系统,其特征在于,所述换向组件为齿轮齿条组件,齿条(203)沿递送方向延伸,各所述驱动机构(20)的齿条(203)为同一齿条;或者,
10.根据权利要求1-5任意一项所述的介入手术机器人的递送系统,其特征在于,所述递送系统还包括导轨(30),所述导轨(30)沿递送方向延伸,用于导引递送机构沿递送方向移动。
11.根据权利要求1-5任意一项所述的介入手术机器人的递送系统,其特征在于,所述递送系统还包括测距机构(40),每个测距机构(40)对应测量同一个递送单元(10)的第一递送机构(101)和第二递送机构(102)在递送方向上的距离。
12.根据权利要求11所述的介入手术机器人的递送系统,其特征在于,所述测距机构(40)为激光传感测距机构,所述激光传感测距机构包括激光传感器(401)和测距挡板(402);所述激光传感器(401)和测距挡板(402)分别连于两个递送机构,所述激光传感器(401)发出的测量光能够沿递送方向照射到所述测距挡板(402)上。
技术总结
本申请公开了一种介入手术机器人的递送系统,涉及医疗器械技术领域。该递送系统包括多个递送单元,各所述递送单元沿同一递送方向依次布置且能够分别递送沿递送方向依次同轴套接的多个长直介入耗材。该递送系统单次能够连续递送多个长直介入耗材、递送效率高,利于降低介入手术的操作复杂度和缩短介入手术的时长。
技术研发人员:请求不公布姓名
受保护的技术使用者:北京万思医疗器械有限公司
技术研发日:20230525
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!