血管介入手术机器人及其隔菌传动构件的制作方法
本技术涉及医疗器械领域,具体地涉及一种应用于血管介入手术机器人的隔菌传动构件及血管介入手术机器人。
背景技术:
1、血管介入手术机器人是外科手术机器人与血管介入技术的有机结合。机器人操纵介入手术器械,可以工作在对医生不利的环境,参照医疗图像精确定位,能够没有颤动地执行持续动作,同时快速、准确地通过复杂的轨迹,精确到达目标血管,最后在医生的指挥下或自主地完成血管介入手术。目前的血管介入手术机器人与无菌耗材的传动过程中,传动齿轮与无菌耗材直接接触,存在无菌耗材被有菌的血管介入手术机器人污染的问题,增加了手术中病人被感染的危险性。
技术实现思路
1、为了解决上述技术问题或者至少部分地解决上述技术问题,本实用新型提供了一种应用于血管介入手术机器人的隔菌传动构件及血管介入手术机器人。
2、本实用新型提供了一种应用于血管介入手术机器人的隔菌传动构件,包括传动构件以及设置在所述传动构件外周的隔离件,所述传动构件的一部分与有菌传动构件连接,所述传动构件的还有一部分与无菌传动构件连接,所述有菌传动构件能够通过所述传动构件带动所述无菌传动构件转动,所述隔离件设置成能够将所述有菌传动构件和所述无菌传动构件隔开。
3、可选地,所述传动构件包括轴套和设置在所述轴套上的第一传动件和第二传动件,所述第一传动件和所述第二传动件分别位于所述隔离件的两侧,且所述第一传动件与所述有菌传动构件连接,所述第二传动件与所述无菌传动构件连接。
4、可选地,所述第一传动件与所述有菌传动构件传动连接,所述第二传动件与所述无菌传动构件传动连接。
5、可选地,所述第一传动件和所述第二传动件分别均为传动轮。
6、可选地,所述传动轮为传动齿轮或传动带轮。
7、可选地,所述传动轮的中部设有可供转轴穿过的轴孔。
8、可选地,所述传动轮与所述转轴之间通过轴承连接。
9、可选地,所述隔离件包括设置在所述传动构件外周上的环形安装板以及设置在所述环形安装板外周上的环形密封件。
10、可选地,所述环形安装板的外周设有环形安装槽,所述环形密封件的一部分设置在所述环形安装槽内,且其另一部分能够沿径向伸出所述环形安装槽。
11、本实用新型还提供了一种血管介入手术机器人,包括耗材盒以及上述任一个技术方案中所述的应用于血管介入手术机器人的隔菌传动构件,所述无菌传动构件设置在所述耗材盒中,所述隔离件的一侧能够抵接至所述耗材盒的内壁上,以将所述有菌传动构件和所述无菌传动构件隔开。
12、本实用新型实施方式提供的技术方案与现有技术相比具有如下优点:
13、本实用新型提供的隔菌传动构件能够将有菌传动构件的转动传递至无菌传动构件,以带动无菌传动构件转动,且隔离件能够将有菌传动构件和无菌传动构件隔开,避免有菌的传动部分将细菌或灰尘传递到无菌耗材部分,避免无菌耗材被有菌的环境污染,极大增强了使用血管介入手术机器人手术时的安全性。
技术特征:
1.一种应用于血管介入手术机器人的隔菌传动构件,其特征在于,包括传动构件(4)以及设置在所述传动构件(4)外周的隔离件(5),所述传动构件(4)的一部分与有菌传动构件(2)连接,所述传动构件(4)的还有一部分与无菌传动构件(3)连接,所述有菌传动构件(2)能够通过所述传动构件(4)带动所述无菌传动构件(3)转动,所述隔离件(5)设置成能够将所述有菌传动构件(2)和所述无菌传动构件(3)隔开。
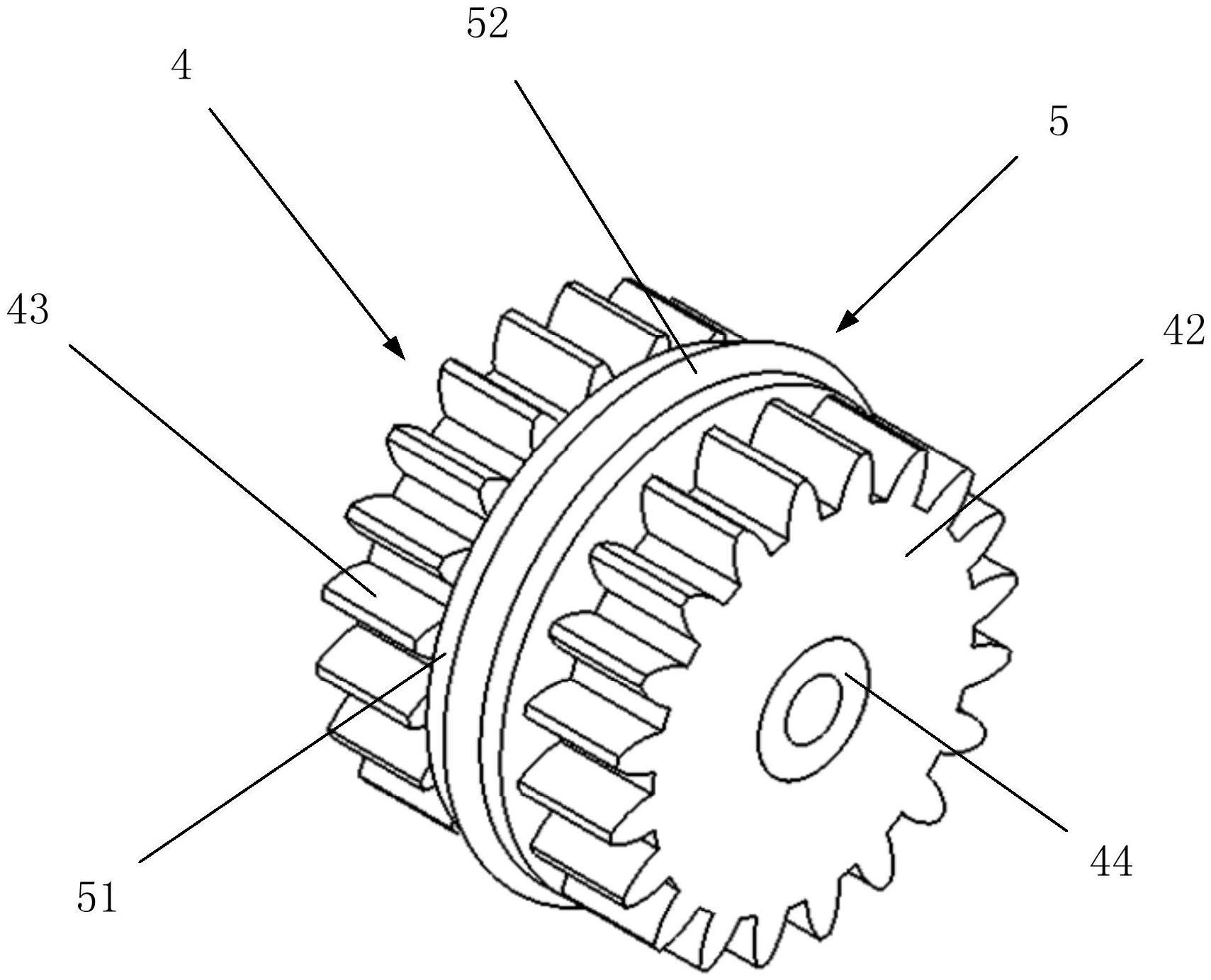
2.根据权利要求1所述的应用于血管介入手术机器人的隔菌传动构件,其特征在于,所述传动构件(4)包括轴套(41)和设置在所述轴套(41)上的第一传动件(42)和第二传动件(43),所述第一传动件(42)和所述第二传动件(43)分别位于所述隔离件(5)的两侧,且所述第一传动件(42)与所述有菌传动构件(2)连接,所述第二传动件(43)与所述无菌传动构件(3)连接。
3.根据权利要求2所述的应用于血管介入手术机器人的隔菌传动构件,其特征在于,所述第一传动件(42)与所述有菌传动构件(2)传动连接,所述第二传动件(43)与所述无菌传动构件(3)传动连接。
4.根据权利要求3所述的应用于血管介入手术机器人的隔菌传动构件,其特征在于,所述第一传动件(42)和所述第二传动件(43)均为传动轮。
5.根据权利要求4所述的应用于血管介入手术机器人的隔菌传动构件,其特征在于,所述传动轮为传动齿轮或传动带轮。
6.根据权利要求4所述的应用于血管介入手术机器人的隔菌传动构件,其特征在于,所述传动轮的中部设有可供转轴穿过的轴孔。
7.根据权利要求6所述的应用于血管介入手术机器人的隔菌传动构件,其特征在于,所述传动轮与所述转轴之间通过轴承(44)连接。
8.根据权利要求1至7中任一项所述的应用于血管介入手术机器人的隔菌传动构件,其特征在于,所述隔离件包括设置在所述传动构件(4)外周上的环形安装板(51)以及设置在所述环形安装板(51)外周上的环形密封件(52)。
9.根据权利要求8所述的应用于血管介入手术机器人的隔菌传动构件,其特征在于,所述环形安装板(51)的外周设有环形安装槽,所述环形密封件(52)的一部分设置在所述环形安装槽内,且其另一部分能够沿径向伸出所述环形安装槽。
10.一种血管介入手术机器人,其特征在于,包括耗材盒(1)以及如权利要求1至9中任意一项所述的应用于血管介入手术机器人的隔菌传动构件,所述无菌传动构件(3)设置在所述耗材盒(1)中,所述隔离件(5)的一侧能够抵接至所述耗材盒(1)的内壁上,以将所述有菌传动构件(2)和所述无菌传动构件(3)隔开。
技术总结
本技术涉及医疗器械领域,公开了一种应用于血管介入手术机器人的隔菌传动构件及血管介入手术机器人。该隔菌传动构件包括传动构件和隔离件,传动构件的一部分与有菌传动构件连接,还有一部分与无菌传动构件连接,隔离件设置成能够将有菌传动构件和无菌传动构件隔开。该血管介入手术机器人包括上述的隔菌传动构件。本技术提供的隔菌传动构件能够将有菌传动构件的转动传递至无菌传动构件,以带动无菌传动构件转动,且隔离件能够将有菌传动构件和无菌传动构件隔开,避免有菌的传动部分将细菌或灰尘传递到无菌耗材部分,避免无菌耗材被有菌的环境污染,极大增强了使用血管介入手术机器人手术时的安全性。
技术研发人员:请求不公布姓名
受保护的技术使用者:北京万思医疗器械有限公司
技术研发日:20230613
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!