一种机械手的制作方法
本技术涉及一种mrghifu系统,具体涉及一种机械手。
背景技术:
1、在现代医学领域,磁共振引导的高强度聚焦超声(magnetic resonance-guidedhigh-intensity focused ultrasound,mrghifu)技术日益受到重视。该技术融合了磁共振成像(magnetic resonance imaging,mri)与高强度聚焦超声(high-intensity focusedultrasound,hifu)的优势,为多种疾病治疗提供了一种非侵入性、环保、可重复应用的创新手段。众多临床医生已认可mrghifu技术在治疗过程中所展现出的显著潜力。尤其在乳腺纤维腺瘤的治疗领域,mrghifu技术亦具有广泛应用前景。
2、然而,现有技术中产生超声的探头本身治疗范围有限,为此,迫切需要设计和开发一款磁共振兼容的机械手,以搭载超声探头并实现大距离的位移,进而扩大可治疗范围。然而,针对mrghifu技术在乳腺纤维腺瘤治疗中的应用,设计一款磁共振兼容的机械手臂面临多个技术难点。首先,关于机械手臂的磁共振兼容性,必须确保其材料、结构和运动方式不受磁场干扰,以满足在磁共振环境下正常工作的需求。其次,避免机械手臂受磁共振干扰以保证其稳定性和精确性,在磁共振设备中尤为关键。此外,考虑到磁共振空间的狭小,实现机械手臂在有限空间内产生足够大的位移是一项具有挑战性的任务,需要精确控制机械手臂的运动,以实现预期的治疗效果。最后,机械手臂如何与探头、线圈进行连接,以确保机械手臂与超声设备之间的高效协同,也是需要重点解决的问题。
技术实现思路
1、本实用新型的目的就是为了解决上述问题至少其一而提供一种机械手,以解决现有技术中mrghifu技术在乳腺纤维腺瘤治疗中无法获得大距离位移而使得治疗范围受限的问题,实现了在小空间内精确、稳定的进行大范围运动,扩大mrghifu技术在乳腺纤维腺瘤治疗的应用范围。
2、本实用新型的目的通过以下技术方案实现:
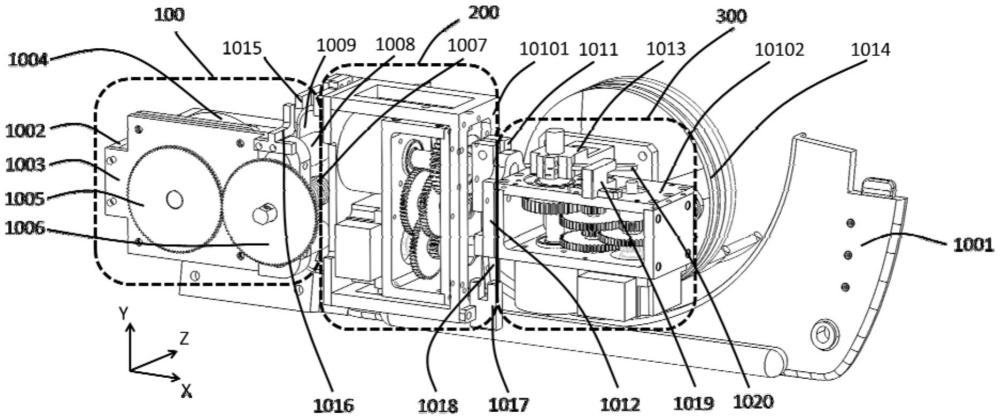
3、一种机械手,包括机械手支架、移动装置、旋转装置和摆动装置;
4、所述移动装置设置于机械手支架上,所述移动装置、所述旋转装置、所述摆动装置依次连接;
5、所述移动装置,用于控制外部的超声探头沿机械手支架的z轴方向运动;
6、所述旋转装置,用于控制外部的超声探头沿机械手支架的x轴轴向转动;
7、所述摆动装置,用于控制外部的超声探头沿机械手支架的y轴轴向转动。
8、优选地,所述移动装置包括第一驱动机构、传动组件、移动机构;所述第一驱动机构通过传动组件与移动机构连接,所述移动机构与旋转装置连接;
9、所述第一驱动机构,用于提供动力;
10、所述传动组件,用于在第一驱动机构的驱动下运动并传递动力;
11、所述移动机构,用于在传动组件的带动下沿机械手支架的z轴方向运动;
12、所述旋转装置,跟随移动机构运动。
13、通过传动组件的设置,可以对第一驱动机构输出的动力进行换向,避免多个部件依次排开形成长条状结构,提高移动装置的集成度。
14、优选地,所述移动装置还包括:导向机构,所述导向机构设置于机械手支架上;所述移动机构沿导向机构运动。
15、优选地,所述导向机构平行于机械手支架z轴;所述移动机构套设于导向机构上。
16、导向机构直接设置于机械手支架上,可保证装配后其自身方向的准确;通过导向机构对运动方向进行导向,避免移动机构在移动过程中发生转向、走偏、自转等问题,同时也起到对移动机构的支撑作用。
17、优选地,所述传动组件包括齿轮组和传动机构;
18、所述第一驱动机构的输出轴连接传动组件中的输入齿轮;所述传动组件中的输出齿轮直接或间接的啮合连接于输入齿轮上;所述传动机构由输出齿轮驱动并传递动力;
19、所述移动机构螺接于传动机构上;
20、所述第一驱动机构的输出轴旋转,通过齿轮组的传动使传动机构发生旋转,带动移动机构运动。
21、传动机构将第一驱动机构的旋转运动转化为移动机构的直线运动,满足机械手在z轴方向的运动;采用齿轮组进行传动,具有传动比准确、效率高、结构紧凑、寿命长等优势,使得机械手调整更为精确,可满足微调的需求,调整更灵活,适用性广。
22、优选地,所述第一驱动机构通过连接机构连接至机械手支架上;和/或
23、所述移动机构上连接有第一限位开关,所述移动机构的移动路径上设有第一触发器,所述第一限位开关在触碰第一触发器后触发。
24、当第一触发器触碰到第一限位开关后,第一限位开关发出信号并记录此时的位置(触碰位置)为移动的起始点。
25、优选地,所述旋转装置包括第一变速箱模块和夹紧机构;所述第一变速箱模块连接移动装置,所述夹紧机构连接摆动装置;
26、所述第一变速箱模块的输出轴连接夹紧机构,所述第一变速箱模块带动夹紧机构进行旋转;
27、和/或
28、所述摆动装置包括第二变速箱模块和支撑机构,所述第二变速箱模块连接旋转装置,所述支撑机构用于连接超声探头;
29、所述第二变速箱模块的输出轴连接支撑机构,所述第二变速箱模块带动支撑机构进行旋转。
30、旋转装置与摆动装置可采用变速箱模块进行加速/减速传动,根据需要的精度需求调整减速比,可使机械手在转动与摆动上也能够满足微调的需求。
31、优选地,所述第一变速箱模块外侧壁上设有第二限位开关,所述第一变速箱模块旋转路径上设有第二触发器,所述第二限位开关在触碰第二触发器后触发;和/或
32、所述第二变速箱模块外侧壁上设有第三限位开关,所述第二变速箱模块旋转路径上设有第三触发器,所述第三限位开关在触碰第三触发器后触发。
33、当第二触发器触碰到第二限位开关后,第二限位开关发出信号并记录此时的位置(触碰位置)为转动的起始点。
34、当第三触发器触碰到第三限位开关后,第三限位开关发出信号并记录此时的位置(触碰位置)为摆动的起始点。
35、优选地,所述第一变速箱模块包括第二驱动机构和多级减速传动机构,所述第二驱动机构的输出轴与多级减速传动机构相连;和/或
36、所述第二变速箱模块包括第二驱动机构和多级减速传动机构,所述第二驱动机构的输出轴与多级减速传动机构相连。
37、通过多级减速传动机构的设置使机械手可根据需要的精度需求调整至合适的减速比,进而满足微调的需求;变速箱模块的动力来源独立设置,不受第一驱动机构以及其他部件的影响,可单独控制。
38、优选地,所述多级减速传动机构中每一级的减速比为1~3;和/或
39、所述多级减速传动机构为不少于三级的齿轮传动结构;和/或
40、所述多级减速传动机构的首级与中间级齿轮采用双联齿轮;和/或
41、所述第一变速箱模块还包括与多级减速传动机构中末级机构同轴连接的编码器;和/或
42、所述第二变速箱模块还包括与多级减速传动机构中末级机构同轴连接的编码器;和/或
43、所述机械手的材质为无磁性材质。
44、机械手所用材料均为无磁性材料,电机为无磁性电机,能够完美的和磁共振兼容使用,并且工作过程不会受到磁共振的影响,可以在强磁场中工作。
45、双联齿轮的运用,可产生同轴不同速的效果;在同一个变速箱模块内,设计多轴联动,将电机的旋转运动不断耦合、减速,以使力矩不断增大,最终可在狭小的空间内实现多级减速。
46、常规条件下,外部的超声探头发生的以机械手支架的x轴轴向转动以及以机械手支架的y轴轴向转动,可采取以对应方向的直径作为旋转中心轴,保证旋转过程的对应性;在一些特殊环境下,也可采取偏心轴的方式设置,使得超声探头具有更广的作用范围。
47、本实用新型的工作原理为:
48、该机械手通过动作移动装置控制其沿机械手支架在z轴方向的运动,通过动作旋转装置控制其绕机械手支架的x轴的运动,通过动作摆动装置控制其绕机械手支架的y轴的运动。
49、与现有技术相比,本实用新型具有以下有益效果:
50、本实用新型的机械手具有高空间利用率,可在小空间内通过各动作单元的联合运动为超声探头提供足够的活动范围,360°全方位运动,实现大距离下的精确位移,扩大超声探头可扫描范围进而可扩大治疗范围,且移动装置、旋转装置、摆动装置与成像范围不在同一工作区域,降低了运动过程产生的电信号对磁共振的干扰,工作过程更加安全可靠,避免机械手受磁共振干扰,提升了机械手动作的稳定性和精确性。
- 还没有人留言评论。精彩留言会获得点赞!