一种智能导盲车的制作方法
本技术属于导盲,具体涉及一种智能导盲车。
背景技术:
1、导盲犬能够避障从而引导盲人出行,但由于导盲犬的供应有限,现开发了导盲智能设备以辅助盲人出行,目前的导盲智能设备主要包括机械犬、可穿戴设备和导盲车等。现有的导盲车需要提前划定特定路线,仅能实现对室内避障进行引导,尚不能对户外盲道和红绿灯进行识别。
技术实现思路
1、本实用新型的目的在于提供一种能够引盲人在户外沿盲道安全行驶的智能导盲车,能够识别红绿灯和前方的障碍物,具有轻型化、小型化的优点。
2、为实现上述目的,本实用新型提供一种智能导盲车,包括:
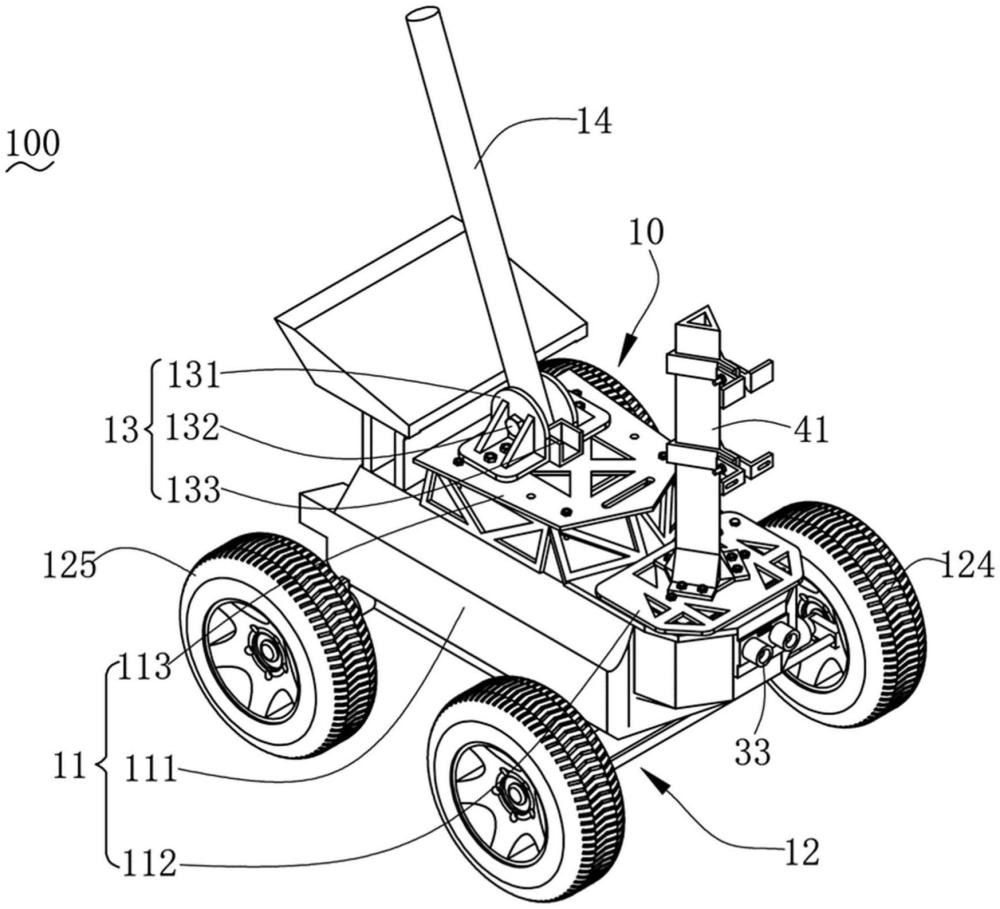
3、车体,所述车体包括车架、与所述车架连接且位于所述车架上方的牵引杖、以及与所述车架连接的车轮组件,其中,所述车轮组件包括位于所述车架的前端且与所述车架连接的第一连接轴、分别安装于所述第一连接轴两端的两个前车轮、与所述第一连接轴铰接的转向件、位于所述车架的后端且与所述车架连接的第二连接轴、及分别安装于所述第二连接轴两端的两个后车轮;
4、驱动模组,所述驱动模组包括安装于所述车架的第一直行电机、第二直行电机和转向电机,所述第一直行电机的输出轴与所述第一连接轴连接,所述第二直行电机的输出轴与所述第二连接轴连接,所述转向电机的输出轴与所述转向件连接;
5、传感器模组,所述传感器模组包括安装于所述车架且朝向所述车体正前方的姿态传感器、安装于所述第二连接轴的霍尔传感器、及安装于所述车架的前侧的超声波传感器,其中,所述姿态传感器用于获取所述车体的角度姿态,所述霍尔传感器用于获取所述车体的行驶速度,所述超声波传感器用于获取所述车体与障碍物之间的距离;
6、视觉识别模组,所述视觉识别模组包括与所述车架固定连接的摄像头支架、及沿所述摄像头支架的高度方向间隔设置的第一图像识别模块和第二图像识别模块,所述第一图像识别模块用于识别盲道,所述第二图像识别模块用于识别红绿灯;
7、控制器,所述控制器的第一输入端与所述传感器模组连接,所述控制器的第二输入端与所述视觉识别模组连接,所述控制器的输出端与所述驱动模组连接,所述控制器用于根据所述传感器模组发送的数据和所述视觉识别模组发送的数据控制所述驱动模组的各个电机的工作状态。
8、在一种具体的实施方式中,所述第一图像识别模块为搭载有ov56感光摄像头的openmv4 h7电路板,所述第二图像识别模块为基于k210芯片的maix bit开发板。
9、在一种具体的实施方式中,所述转向件包括与所述第一连接轴平行的转轴、及两个平行间隔设置的连接杆,所述连接杆的一端与所述第一连接轴铰接且另一端与所述转轴的末端铰接,所述转向电机的输出轴与所述转轴连接。
10、在一种具体的实施方式中,两个所述后车轮分别为第一后车轮和第二后车轮,所述霍尔传感器包括套设于所述第二连接轴且临近所述第一后车轮设置的霍尔传感器支架、安装于所述霍尔传感器支架上的霍尔探头、及均匀间隔设置于所述第一后车轮朝向所述第二后车轮一侧的多个磁片。
11、在一种具体的实施方式中,所述霍尔传感器支架包括可拆卸连接且共同围空心圆柱体形的第一支架和第二支架,所述第一支架包括第一半圆环、自所述第一半圆环的两端分别延伸的两个第一延伸部,所述第二支架包括与所述第一半圆环共同围成空心圆柱体形的第二半圆环、自所述第二半圆环的两端分别延伸的第二延伸部、及自所述第二半圆环的中间位置向远离所述第一半圆环方向延伸的第三延伸部,两个所述第一延伸部和两个所述第二延伸部一一对应且通过螺栓连接,所述霍尔探头安装于所述第三延伸部上。
12、在一种具体的实施方式中,所述车架包括车架本体、及固定于所述车架本体上侧且沿所述车架本体的长度方向间隔设置的第一定位板和第二定位板,所述第一定位板临近所述超声波传感器设置,所述摄像头支架和所述姿态传感器均安装于所述第一定位板,所述车体还包括固定于所述第二定位板的牵引杖装夹,所述牵引杖安装于所述牵引杖装夹。
13、在一种具体的实施方式中,所述牵引杖装夹包括两个相对间隔设置的安装夹、及用于将所述安装夹与所述牵引杖铰接的铰接组件,所述安装夹包括与所述第二定位板固定连接的第一安装板、自所述第一安装板垂直弯折延伸的第二安装板、及开设于所述第二安装板上的安装孔,所述牵引杖的一端开设有连接孔,且所述连接孔位于两个所述安装夹的安装孔之间,所述铰接组件包括同时穿过所述两个所述安装孔和所述连接孔的铰接轴、及安装于所述铰接轴的自由端的紧固件。
14、在一种具体的实施方式中,所述摄像头支架包括与所述第一定位板可拆卸连接的支架底座、与所述支架底座固定连接且沿第一方向延伸的主支架、间隔套设于所述主支架上的至少两个支架夹紧件、及与每个所述支架夹紧件配套设置的图像识别模块固定件,所述第一图像识别模块和第二图像识别模块安装于所述图像识别模块固定件。
15、在一种具体的实施方式中,所述主支架为中空的三棱柱结构,每个所述支架夹紧件由两个相对设置的第一夹紧板和第二夹紧板连接形成,所述第一夹紧板和所述第二夹紧板结构相同,均包括与所述主支架的侧棱完全抵接的第一斜板、自所述第一斜板弯折延伸且与所述主支架的侧棱部分抵接的第二斜板、自所述第二斜板向远离所述主支架弯折延伸的第一竖板、自所述第一斜板向远离所述主支架弯折延伸的第二竖板、开设于所述第一竖板的第一螺孔、及开设于所述第二竖板的第二螺孔,所述摄像头支架还包括第一螺柱和第二螺柱,所述第一夹紧板的第一螺孔和第二夹紧板的第一螺孔相对设置,所述第一螺柱依次穿过两个第一螺孔并通过第一螺柱螺帽紧固固定,所述第一夹紧板的第二螺孔和所述第二夹紧板的第二螺孔相对设置,所述第二螺柱依次穿过两个第二螺孔并通过第二螺柱帽紧固固定。
16、在一种具体的实施方式中,所述图像识别模块固定件由两块l型板组成,所述l型板包括套设于所述第二螺柱上的第一固定板、自所述第一固定板向外垂直弯折延伸的第二固定板,所述第一夹紧板和所述第二夹紧板的两块第二竖板夹设于两块所述l型板的两个第一固定板之间并通过所述第二螺柱连接,两个所述第一固定板能够绕所述第二螺柱转动,所述第一图像识模块和所述第二图像识别模块安装于所述第二固定板。
17、本实用新型的有益效果至少包括:
18、本实用新型中,所述智能导盲车包括车体、用于驱动所述车体行驶的驱动模组、用于检测车体的行驶状态的传感器模组、用于识别红绿灯和盲道的视觉识别模组、及与所述驱动模组、所述传感器模组和所述视觉识别模组连接的控制器,其中,所述驱动模组包括用于驱动所述前车轮直行和后退的第一直行电机、用于驱动所述后车轮直行和后退的第二直行电机、及用于驱动所述前车轮转向的转向电机;所述传感器模组包括用于获取所述车体的角度姿态的姿态传感器、用于获取车体的行驶速度的霍尔传感器、及用于获取所述车体与障碍物之间的距离的超声波传感器;这样,所述控制器根据所述传感器模组发送的数据和所述视觉识别模组发送的数据控制所述第一直行电机、所述第二直行电机和所述转向电机工作,以使所述智能导盲车能够引导盲人避障,并且在避障后重新回到盲道;同时还能正确按照红绿灯的指示行走,辅助盲人沿着盲道安全出行。
19、除了上面所描述的目的、特征和优点之外,本实用新型还有其它的目的、特征和优点。下面将参照图,对本实用新型作进一步详细的说明。
- 还没有人留言评论。精彩留言会获得点赞!