用于实时拉曼光谱法以进行癌症检测的系统和方法与流程
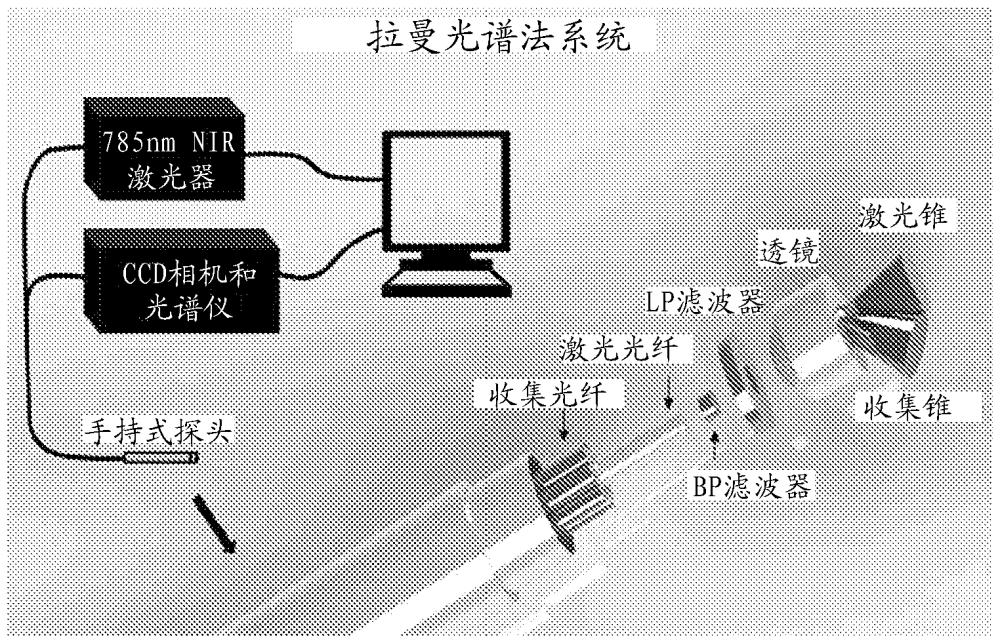
本发明涉及使用拉曼光谱法系统和方法以进行癌症检测。具体地,本发明可以涉及在外科手术过程期间实时使用拉曼系统和方法以检测肿瘤边缘中的患癌组织。发明的系统包括一种布置,该布置包括激光激发源、探头、光谱仪和相机,借此,探头的光学器件具体地被设计成用于外科手术环境中进行拉曼收集,并且该相机适应于拉曼应用的已知限制。可以将数据质量评估、特征提取和分类的各种发明的方法应用于拉曼系统,使得可以去除拉曼数据的已知污染物源,可以对照已知拉曼生物标志物来评估拉曼数据,并且可以实现对拉曼数据的后续分类。更具体地,本发明涉及一种系统和方法,通过该系统和方法,可以在癌症外科手术期间在实时应用中部署拉曼光谱法,以从拉曼数据中滤除已知污染物的方式来评估肿瘤边缘和其他组织,对照已知生物标志物来比较获得的拉曼数据,并且将受试者组织分类为患癌的或非患癌的,并且可以根据患癌组织的亚型附加地对受试者组织分类。
背景技术:
1、尽管在脑肿瘤(以及其他肿瘤类型)的外科手术治疗中取得了进展,但是获得对肿瘤的最佳外科手术结果和标识仍然是一个挑战。拉曼光谱法——一种基于激光的技术,其可以被用来基于光的非弹性散射来非破坏性地区分分子,正被用于改善脑肿瘤外科手术的准确性。最近,已经公开了许多研究来检查拉曼光谱法在区分脑肿瘤与正常组织中的准确性,并且绘制不同脑组织类型的光谱。然而,由于数据样本不足以及缺乏针对构成良好拉曼光谱的内容的标准分类算法或指南,这些研究受限或无定论。不存在允许对跨受试者内和受试者间两者的测量结果以及跨测量条件的光谱质量的比较的量度。
2、经典地将拉曼光谱建模为所分析样本的分子构成的光谱的线性混合。然而,由于样本的仪器和生物学特性所致的物理失真向拉曼光谱模型中添加线性和非线性污染物。这些失真是暗电流、检测器和光学器件响应、荧光背景、峰未对准和峰宽异质性。在存在这些失真的情况下设计监督分类算法导致差的分类准确性。附加地,来自不同生物学起源的高度可变的受试者内和受试者间的异质数据集的高维数可能给机器学习技术造成重大挑战。
3、除上述内容以外,还有多种加成失真会污染拉曼光谱。这些包括光谱饱和、宇宙射线干扰、环境光干扰、高背景噪声和低拉曼信号水平。当前的拉曼方法不包括用于滤除这些失真以允许在外科手术环境中实时使用的方法。
4、许多当前的拉曼光谱方法采用完整的拉曼光谱来训练分类算法。除了前述污染物之外,由于拉曼光谱的非重要部分中的噪声水平,这导致差的分类准确性。对于任何一种特定的组织类型分类,都存在最相关的拉曼光谱特征的子集,并且使用这些特征来训练分类算法可以导致大大提高的分类准确性。然后可以使用比如支持向量机之类的监督学习模型来对拉曼数据进行分类。
5、因此,需要一种采用数据质量评估、特征提取和监督学习模型的方法的拉曼系统,这些方法导致对照已知的拉曼生物标志物来评估相关的所提取的拉曼特征以得出对癌症和正常组织的准确分类。为了满足癌症检测需要,本文中呈现了用于实时应用的、包括在每个级的新颖方法的发明的系统。
技术实现思路
技术特征:
1.一种标识在分离患癌组织和正常组织中具有重要意义的拉曼数据特征的方法,其包括:
2.根据权利要求1所述的方法,其中,通过投票或k均值聚类来确定用于确定哪些提取的特征最常出现的选择准则。
3.根据权利要求1所述的方法,其中,j由分类器的期望性能确定。
4.根据权利要求1所述的方法,其中,使用svm(添加的分类器技术)来实行利用所标识的拉曼光谱特征来训练分类器,以在患癌组织与正常组织之间进行分离。
5.根据权利要求1所述的方法,其中,训练分类器以在患癌组织与正常组织之间进行分离包括在不同类别的患癌组织之间进行分离,并且使用多层级联分类结构。
6.根据权利要求1所述的方法,其中,使用从以下的组中选择的技术来实行基于信息理论的特征提取准则,所述组包括最大关联最小冗余、互信息最大化、条件互信息最大化和基于快速相关性的滤波器。
技术总结
提供的是在外科手术过程期间实时检测肿瘤边缘中的患癌组织的拉曼系统和方法。该系统包括激光激发源、探头、光谱仪和相机,其具体地被设计用于在外科手术期间实时使用拉曼光谱法。发明的方法涉及拉曼数据的质量评估、将获得的拉曼数据对照已知生物标志物进行比较、以及在对应的拉曼数据的基础上将组织分类为患癌的或非患癌的。该系统和方法允许在实时外科应用中利用拉曼光谱法对组织进行先前无法进行的检测和分类,包括标识癌症亚型。
技术研发人员:R·亚达夫,J-P·特雷姆布莱,R·阿加瓦尔
受保护的技术使用者:奥迪思医疗公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!