手术机器人及由其执行的方法与流程
本公开涉及医疗设备领域,并且更具体地涉及一种手术机器人及由其执行的方法。
背景技术:
1、微创手术机器人一般包括医生控制台和患者手术平台。患者手术平台装配有多个多轴手术机械臂,并且手术器械可以安装于机械臂上。通过接收来自医生控制台的控制指令,患者手术平台可以实现多种空间运动,完成各种手术动作。
技术实现思路
1、本部分被提供以便以简化的形式介绍下面在具体实施方式部分中进一步描述的概念的选集。本部分并非旨在确定所要求保护的主题的必要特征,也并非旨在限制所要求保护的主题的范围。
2、本公开的目的之一是提供一种改进的手术机器人及由其执行的方法。特别地,本公开所要解决的技术问题之一是在现有的微创手术机器人中,尤其是当两个医生控制台同时控制一个患者手术平台时,可能会发生机械臂的碰撞从而造成患者损伤。
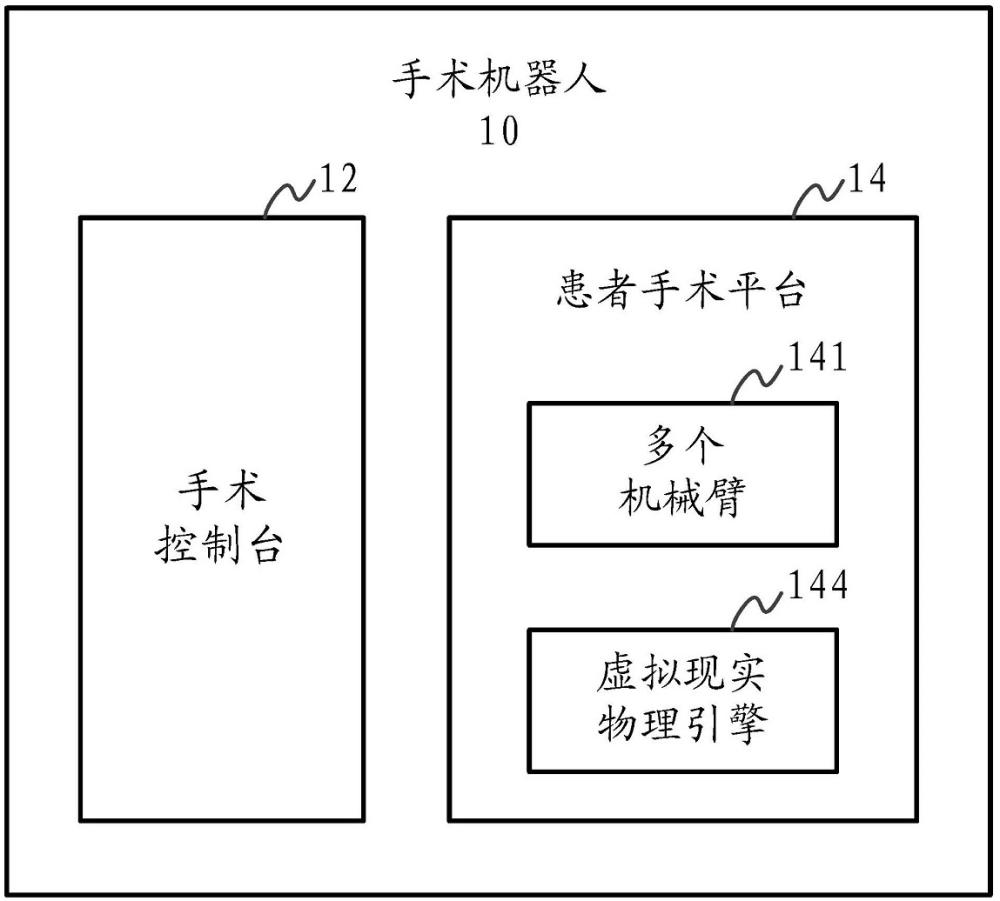
3、根据本公开的第一方面,提供了一种手术机器人。所述手术机器人包括手术控制台和具有多个机械臂的患者手术平台。所述手术控制台被配置为采集操作人员的控制输入,基于所述控制输入生成用于控制所述患者手术平台的所述多个机械臂中的至少一部分的控制信息,并将所述控制信息发送给所述患者手术平台。所述患者手术平台被配置为采集所述多个机械臂的状态信息,基于所述状态信息和从所述手术控制台接收的所述控制信息,使用能够对所述多个机械臂的运动进行模拟的虚拟现实物理引擎确定所述多个机械臂的碰撞检测结果,以及响应于所述碰撞检测结果指示两个或多于两个机械臂将会发生碰撞,而执行碰撞防止操作。
4、根据上述第一方面,由于使用虚拟现实物理引擎进行碰撞检测并在将会发生碰撞的情况下执行碰撞防止操作,所以能够准确地预判和防止碰撞的发生,从而避免潜在的事故、提高系统的安全性。
5、在本公开的一个实施例中,所述患者手术平台包括第一控制器和第二控制器。所述第一控制器被配置为采集所述多个机械臂的状态信息,并将所述状态信息和所述控制信息发送给所述第二控制器。所述第二控制器被配置为基于所述状态信息和所述控制信息,使用所述虚拟现实物理引擎确定所述碰撞检测结果,并将所述碰撞检测结果发送给所述第一控制器。所述第一控制器被配置为响应于所述碰撞检测结果指示两个或多于两个机械臂将会发生碰撞,而执行碰撞防止操作。
6、在本公开的一个实施例中,所述碰撞防止操作包括以下操作中的一个或多个:停止将要基于所述状态信息和所述控制信息而使所述多个机械臂执行的手术动作;以及将所述碰撞检测结果发送给所述手术控制台。
7、在本公开的一个实施例中,所述患者手术平台被配置为响应于所述碰撞检测结果指示没有机械臂将会发生碰撞,而基于所述状态信息和所述控制信息使所述多个机械臂执行相应的手术动作。
8、在本公开的一个实施例中,所述患者手术平台被配置为使用所述虚拟现实物理引擎建立所述多个机械臂的三维模型,基于所述状态信息和所述控制信息对所述三维模型进行更新,确定在更新的三维模型中是否有两个或多于两个机械臂将会发生碰撞,以及将所述确定的结果作为所述碰撞检测结果。
9、在本公开的一个实施例中,在所述多个机械臂中的至少一部分上安装有手术器械部件。
10、在本公开的一个实施例中,所述手术控制台被配置为将从所述患者手术平台接收的所述碰撞检测结果通知所述操作人员。
11、在本公开的一个实施例中,以下述形式中的一种或多种将所述碰撞检测结果通知所述操作人员:数据;图像;声音;光信号;以及力反馈。
12、在本公开的一个实施例中,所述手术控制台的数量为一个或多个。
13、根据本公开的第二方面,提供了一种由手术机器人执行的方法。所述方法包括:由手术控制台采集操作人员的控制输入。所述方法还包括:由所述手术控制台基于所述控制输入生成用于控制患者手术平台的多个机械臂中的至少一部分的控制信息。所述方法还包括:由所述手术控制台将所述控制信息发送给所述患者手术平台。所述方法还包括:由所述患者手术平台采集所述多个机械臂的状态信息;所述方法还包括:由所述患者手术平台基于所述状态信息和从所述手术控制台接收的所述控制信息,使用能够对所述多个机械臂的运动进行模拟的虚拟现实物理引擎确定所述多个机械臂的碰撞检测结果。所述方法还包括:由所述患者手术平台响应于所述碰撞检测结果指示两个或多于两个机械臂将会发生碰撞,而执行碰撞防止操作。
14、根据上述第二方面,由于使用虚拟现实物理引擎进行碰撞检测并在将会发生碰撞的情况下执行碰撞防止操作,所以能够准确地预判和防止碰撞的发生,从而避免潜在的事故、提高系统的安全性。
15、根据本公开的第三方面,提供了一种计算机可读存储介质。在所述计算机可读存储介质上存储有程序指令。所述程序指令在由至少一个处理器执行时使所述至少一个处理器执行根据上述第二方面所述的患者手术平台的操作。
技术特征:
1.一种手术机器人,包括:
2. 根据权利要求1所述的手术机器人,其中,所述患者手术平台包括:
3. 根据权利要求1或2所述的手术机器人,其中,所述碰撞防止操作包括以下操作中的一个或多个:
4.根据权利要求1或2所述的手术机器人,其中,所述患者手术平台被配置为响应于所述碰撞检测结果指示没有机械臂将会发生碰撞,而基于所述状态信息和所述控制信息使所述多个机械臂执行相应的手术动作。
5.根据权利要求1或2所述的手术机器人,其中,所述患者手术平台被配置为使用所述虚拟现实物理引擎建立所述多个机械臂的三维模型,基于所述状态信息和所述控制信息对所述三维模型进行更新,确定在更新的三维模型中是否有两个或多于两个机械臂将会发生碰撞,以及将所述确定的结果作为所述碰撞检测结果。
6.根据权利要求1或2所述的手术机器人,其中,在所述多个机械臂中的至少一部分上安装有手术器械部件。
7.根据权利要求3所述的手术机器人,其中,所述手术控制台被配置为将从所述患者手术平台接收的所述碰撞检测结果通知所述操作人员。
8.根据权利要求7所述的手术机器人,其中,以下述形式中的一种或多种将所述碰撞检测结果通知所述操作人员:
9.根据权利要求1或2所述的手术机器人,其中,所述手术控制台的数量为一个或多个。
10.一种由手术机器人执行的方法,包括:
11.一种计算机可读存储介质,在所述计算机可读存储介质上存储有程序指令,所述程序指令在由至少一个处理器执行时使所述至少一个处理器执行根据权利要求10所述的患者手术平台的操作。
技术总结
本申请提供了手术机器人及由其执行的方法。根据一个实施例,手术机器人包括手术控制台和具有多个机械臂的患者手术平台。手术控制台被配置为采集操作人员的控制输入,基于控制输入生成用于控制患者手术平台的多个机械臂中的至少一部分的控制信息,并将控制信息发送给患者手术平台。患者手术平台被配置为采集多个机械臂的状态信息,基于状态信息和从手术控制台接收的控制信息,使用能够对多个机械臂的运动进行模拟的虚拟现实物理引擎确定多个机械臂的碰撞检测结果,以及响应于碰撞检测结果指示两个或多于两个机械臂将会发生碰撞,而执行碰撞防止操作。
技术研发人员:金存山,旷静,史文勇
受保护的技术使用者:科弛医疗科技(北京)有限公司
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!