一种介入手术机器人术中监控与保护方法及系统与流程
本发明涉及微创血管介入手术领域,涉及在介入手术机器人术中的实时监控与保护,更具体的说是涉及一种介入手术机器人术中监控与保护方法及系统。
背景技术:
1、目前,微创介入疗法是针对血管疾病的主要治疗手段,和传统外科手术相比,有着切口小、术后恢复时间短等明显优势。心脑血管介入手术是由医生手动将导管、导丝以及支架等器械送入病患体内来完成治疗的过程。
2、在介入手术中,操作导管导丝时,需要时刻小心,人体血管相对比较脆弱,如果在手术中一旦操作不当,可能对人体血管造成损伤,严重者可能危及病人生命。在手术过程中,医生需要实时监控多个位置的手术耗材状态和受力情况,以保证手术操作安全。
3、而对于介入手术机器人术中监控和保护存在如下几个方面的问题:
4、(1)推送导丝或导管过程中,对于导丝或导管的受力变化无法准确判断;
5、(2)在遇到确定导丝或导管受到阻力过大时刻,部分医生难以及时做出保护动作,从而可能造成手术事故;
6、(3)医生注意力往往聚焦在当前操作的手术耗材的头端,难以时刻注意到多个位置的耗材状态;
7、(4)缺少危险状况下的第一时间对应的响应和保护措施,可能造成手术时间延长,增加血管并发症等风险。
8、因此,如何解决上述介入手术机器人术中监控和保护存在的技术问题,成为本领域技术人员亟需解决的问题。
技术实现思路
1、有鉴于此,本发明提供了一种介入手术机器人术中监控与保护方法及系统,其目的在于解决现有机器人手术中,缺少对导丝导管的受力准确判断、阻力过大时没有保护措施、缺少对术中多位置手术耗材状态监控、缺少危险状况时及时保护措施等问题。
2、为了实现上述目的,本发明采用如下技术方案:
3、第一方面,本发明实施例提供一种介入手术机器人术中监控与保护方法,包括以下步骤:
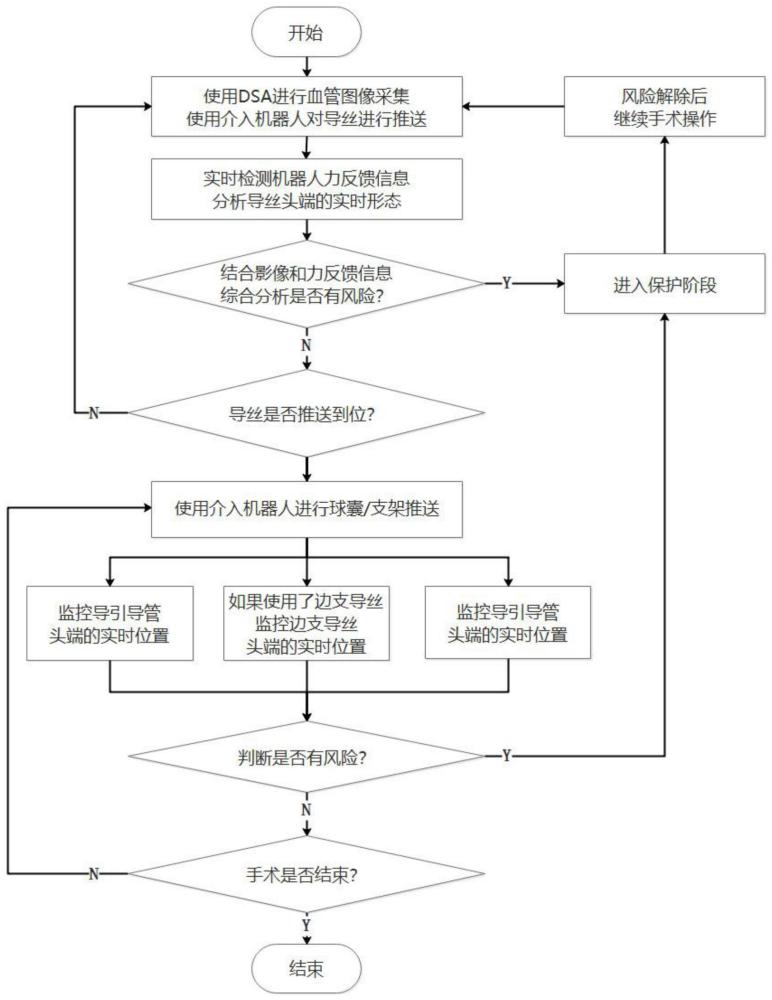
4、s1、根据读取dsa采集的实时血管图像,对介入手术机器人进行导丝推送到目标位置的过程进行监控;实时检测所述介入手术机器人的力反馈信息,并分析相同时刻的导丝头端形态是否有异常变化;综合判断所述导丝实时受到阻力的状态;当判断阻力过大,则进入保护阶段;
5、s2、当介入手术机器人将导丝推送到目标位置后,对介入机器人进行球囊/支架推送过程中导引导管、导丝的头端实时位置进行监控;当所述导引导管和/或导丝的实时位置偏离目标位置时,则进入保护阶段;当所述导引导管和/或导丝的实时位置正常时,持续执行位置监控,直至手术结束。
6、进一步地,对介入机器人进行球囊/支架推送过程中导引导管、导丝的头端实时位置进行监控;包括:
7、当所述导引导管实时位置偏离预定位置时,则进入保护阶段;
8、当介入手术机器人术中使用了边支导丝,且所述边支导丝实时位置偏离预定位置时,则进入保护阶段;
9、当所述主支导丝实时位置偏离预定位置时,则进入保护阶段;
10、当所述导引导管、边支导丝和/或主支导丝的实时位置正常时,持续执行位置监控,直至手术结束。
11、进一步地,所述步骤s1包括:
12、s101、读取实时dsa图像,识别出当前操作的导丝或导管头端;对介入
13、手术机器人进行导丝导管的操作过程进行监控;
14、s102、在操作过程中,读取时刻a的介入手术机器人实时力反馈数据,记为b;计算导丝或导管在正常无阻力推送时的平均力反馈数值,记为c;
15、s103、计算|b-c|/c是否大于第一阈值;如果小于第一阈值,则此时导丝或导管无推送阻力,属于相对安全状态,该状态记录为k;如果大于第一阈值且小于第二阈值,则此时导丝或导管有较小的推送阻力,记录该状态为m,发出警告小心操作提示;
16、s104、如果大于第二阈值,则此时导丝或导管有较大的推送阻力,属于相对危险的状态,该状态记录为n,发出警告提醒小心操作提示,并结合图像进行分析,根据之前的情况记录导丝或导管头端在正常时的形态为e,读取时刻a的dsa图像,观察图中导丝或导管头端的形态记录为d;
17、s105、分析并判断d和e之间的差异性,如果偏差较大,此时导丝或导管头端受到的阻力较大,记录该状态为f;如果偏差较小,此时导丝或导管头端受到的阻力较小,记录该状态为g;
18、s106、综合分析在时刻a导丝或导管头端的受力情况是否处于危险状态,
19、如处于危险状态,则进入保护阶段;如无危险,则时刻a切换到下一时刻,持续监控直到完成导丝或导管的推送过程。
20、进一步地,所述步骤s106包括:
21、s1061、如果时刻a时,检测同时属于状态n和f,则此时导丝或导管处于危险状况,进入保护阶段;如果属于状态n和g,则导丝或导管头端没有较大阻力,其尾端有阻力,发出警告提醒小心操作提示;
22、s1062、如果时刻a时,检测同时属于状态m和f,则此时导丝或导管处于危险状况,进入保护阶段;如果属于状态m和g,则导丝或导管头端没有较大阻力,其尾端有阻力,发出警告提醒小心操作提示;
23、s1063、如果时刻a时,检测同时属于状态k和f,则此时头端有较小阻力,发出警告提醒小心操作提示;如果属于状态k和g,则导丝或导管处于安全状态;
24、s1064、判断是否完成了导丝或导管的推送过程,如果完成,则结束导丝或导管的推送过程监控任务;如果未完成,则将时刻a切换到下一时刻,持续监控直到完成导丝或导管的推送过程。
25、进一步地,当对导引导管实时位置进行监控时,所述步骤s2包括:
26、s201、在导引导管位置监控流程中,读取实时dsa图像,识别出导引导管头端,此时导引导管已经处于放置完成,属于正常状态时,记录导引导管正常的位置坐标,记为a0(a,b);
27、s202、记录在时刻a时,导引导管头端的位置坐标为h(c,d);
28、s203、计算a0(a,b)和h(c,d)之间的移动距离;
29、s204、如果所述移动距离在第一预设范围内,此时导引导管位置处于安全状态,标记当前状态为s;
30、s205、如果所述移动距离在第二预设范围内,此时导引导管位置有移动趋势,处于非安全状态标记当前状态为t,向用户发出警告提示;所述第二预设范围的最大值大于第一预设范围的最大值;
31、s206、如果所述移动距离超出第二预设范围时,此时导引导管位置已明显移动,处于危险状态,将进入保护阶段;
32、s207、判断是否完成了手术操作,如果完成,则结束导引导管位置监控阶段的监控任务;如果未完成,则将时刻a切换到下一时刻,持续监控导引导管头端的位置情况。
33、进一步地,当对边支导丝实时位置进行监控时,所述步骤s2包括:
34、s301、在对边支导丝位置监控流程中,读取实时dsa图像,识别所述dsa图像中是否存在边支导丝;当存在边支导丝时,标记边支导丝的头端在移动到预定位置后的坐标b0(a,b);
35、s302、记录在时刻a时边支导丝头端的位置坐标,记为j(c,d);
36、s303、计算b0(a,b)和j(c,d)之间的移动距离;
37、s304、如果所述移动距离在第一预设范围内,此时边支导丝位置处于安全状态,标记当前状态为s;
38、s305、如果所述移动距离在第二预设范围内,此时边支导丝位置有移动趋势,处于非安全状态标记当前状态为t,向用户发出警告提示;所述第二预设范围的最大值大于第一预设范围的最大值;
39、s306、如果所述移动距离超出第二预设范围时,此时边支导丝位置已明显移动,处于危险状态,将进入保护阶段;
40、s307、判断是否完成了手术操作,如果完成,则结束边支导丝位置监控阶段的监控任务;如果未完成,则将时刻a切换到下一时刻,持续监控导引导管头端的位置情况。
41、进一步地,当对主支导丝实时位置进行监控时,所述步骤s2包括:
42、s401、在对主支导丝位置监控流程中,读取实时dsa图像,识别所述dsa图像中的主支导丝;此时主支导丝已经处于放置完成,属于正常状态时,标记主支导丝的正常预置位置的坐标c0(a,b);
43、s402、记录在时刻a时主支导丝头端的位置坐标,记为m(c,d);
44、s403、计算c0(a,b)和m(c,d)之间的移动距离;
45、s404、如果所述移动距离在第一预设范围内,此时主支导丝位置处于安全状态,标记当前状态为s;
46、s405、如果所述移动距离在第二预设范围内,此时主支导丝位置有移动趋势,处于非安全状态标记当前状态为t,向用户发出警告提示;所述第二预设范围的最大值大于第一预设范围的最大值;
47、s406、如果所述超出第二预设范围时,此时主支导丝位置已明显移动,处于危险状态,将进入保护阶段;
48、s407、判断是否完成了球囊或支架的推送,如果完成,则结束主支导丝位置监控阶段的监控任务;如果未完成,则将时刻a切换到下一时刻,持续监控主支导丝头端的位置情况。
49、进一步地,所述进入保护阶段的流程,包括:
50、(1)、在保护阶段流程中,判断危险信号是否来自图像和力反馈部分,如果是,则切断对应导丝或导管主端控制功能,自动控制介入手术机器人把导丝或导管回撤预设距离,并执行步骤(4);
51、(2)如果不是来自图像和力反馈部分,则判断危险信号是否来自导引导管部分,如果是,则切断医生对所有主端操作的控制功能,并执行步骤(4);
52、(3)如果不是来自导引导管部分,则危险信号来自导丝部分,切断医生对导丝操作的主端操作的控制功能,并执行步骤(4);所述导丝包括主支导丝和/或边支导丝;
53、(4)执行停止对应电机的转动,同时发出危险提示信息,待问题被确认处理后,接收恢复控制功能的指令,恢复对介入手术机器人的控制功能。
54、第二方面,本发明实施例还提供一种介入手术机器人术中监控与保护系统,包括:
55、推送导丝受力监控模块,用于根据读取dsa采集的实时血管图像,对介入手术机器人进行导丝推送到目标位置的过程进行监控;实时检测所述介入手术机器人的力反馈信息,并分析相同时刻的导丝头端形态是否有异常变化;综合判断所述导丝实时受到阻力的状态;当判断阻力过大,则进入保护阶段;
56、导引导管及导丝位置监控模块,用于当介入手术机器人将导丝推送到目标位置后,对介入机器人进行球囊/支架推送过程中导引导管、导丝的头端实时位置进行监控;当所述导引导管和/或导丝的实时位置偏离目标位置时,则进入保护阶段;当所述导引导管和/或导丝的实时位置正常时,持续执行位置监控,直至手术结束。
57、经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种介入手术机器人术中监控与保护方法,具有如下优势:
58、1、本发明所述方法,通过对推送导丝或导管过程中,实时图像和力反馈双重信息综合判断,可以更加准确的判断导丝或导管的受力状态,使得医生可以做出更准确的控制动作。
59、2、本发明所述方法,通对危险状态的自动保护机制,可以在导丝或导管受到阻力过大时,及时做出保护动作,从而避免造成手术事故,使得手术操作更加安全。
60、3、本发明所述方法,可以有效解决部分医生难以在术中监控多个位置手术耗材状态,可以使得医生注意力更加聚焦在当前操作的手术耗材的头端,使得手术效率更高。
61、4、本发明所述方法,通过危险状况下的第一时间对应的响应和保护措施,可以有效保护手术操作的安全,使得医生在操作时更加放心。
- 还没有人留言评论。精彩留言会获得点赞!