一种医用环形直线加速器的自动化机械质控方法及其质控模体
本发明涉及医用加速器质控领域,具体涉及质控模体及对应的质控方法。
背景技术:
1、加速器的质控对临床安全与精准放疗的实现至关重要。在临床实践中,加速器依靠定期质控来完成相关加速器特性的检测,以达到监控加速器的各项特性稳定性与精准性的目的,从而确保加速器满足临床使用的条件。
2、针对传统的c型臂直线加速器,已有成熟且完善的质控流程及方法。但对于环形直线加速器,由于机械机构与传统的c型臂加速器不同,导致环形直线加速器的部分机械质控项目如源皮距难以按照传统的质控方法完成。
3、在加速器的质控中,源皮距的确认是质控的基础。一般加速器等中心的源皮距(等中心到虚源的距离)为100厘米,在通过源皮距为100厘米的条件确认加速器等中心位置后,再以此等中心位置为标准,进行其余机械项目及剂量相关项目的测量。源皮距的准确度影响到大部分的加速器质控项目,因此源皮距的测量对加速器质控至关重要。
4、加速器培训人员建议把环形直线加速器自带的epid的影像中心作为加速器等中心看待,通过把机架移动到不同角度拍摄相应模体的x光的方法,来确认加速器的等中心位置。但是,这种方式只能确认相对等中心,无法确认影像中心的源皮距的具体数值,而许多质控项目的前置条件需要把源皮距设置到100厘米。
5、由于环形加速器的机头内置,源皮距、机架角度等项目无法或不便于按照c型臂直线加速器适用的常规方法完成。
技术实现思路
1、针对现有技术存在的问题,本发明提供一种医用环形直线加速器的自动化机械质控方法及其质控模体,已解决上述至少一个技术问题。
2、本发明的技术方案是:一种医用环形直线加速器的自动化机械质控方法,其特征在于,步骤如下:
3、步骤一,将质控模体摆放在治疗床上,质控模体上设置有与加速器十字形激光线对位的定位结构,将十字形激光线与质控模体上的定位结构进行相互对位,把质控模体移动到理论等中心位置;
4、步骤二,之后根据测量项目导入对应的预制计划,通过预制计划控制环形直线加速器进行工作,环形直线加速器出束并获得epid影像,分析epid影像,再根据对应的计算方法得到测量结果,并计算与预设值的偏差。
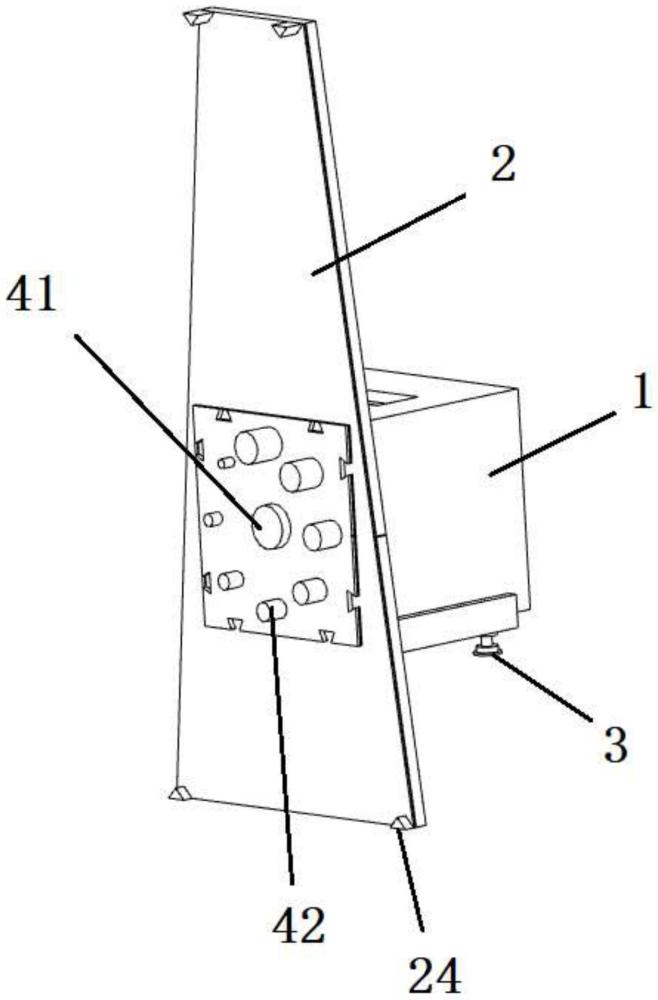
5、进一步优选地,所述质控模体包括呈正方体状的标定块以及呈上宽下窄的等腰梯形的标定板;
6、所述标定块的底部安装有高度可调的支撑脚;
7、所述标定块与所述标定板可拆卸连接;
8、所述标定板的四个角部设置有三棱柱状测量柱;
9、所述标定板上端的两个三棱柱状测量柱均设置有与所述标定板的顶面齐平的棱柱面;
10、所述标定板下端的两个三棱柱状测量柱均设置有与所述标定板的底面齐平的棱柱面。
11、进一步优选地,所述标定板的中央开设有用于插接所述标定块的插孔,所述标定块与所述标定板插接时,所述标定块的前端局部外露出所述标定板。
12、进一步优选地,所述标定块外露出所述标定板的区域的上侧、左侧以及右侧均设置有第一十字形激光定位线槽;
13、所述标定块的上下左右四侧均安装有金属标记点;
14、所述标定板的左侧壁以及右侧壁上均开设有第二十字形激光定位线槽。
15、进一步优选地,测量项目包括源皮距,测量项目是源皮距时,对应的预设计划包括一个射野,机架角度为0°,准直器角度为0°,射野大小为28厘米×28厘米;
16、根据源皮距测量公式获知源皮距测量结果,将源皮距测量结果与预设值的偏差进行对比;
17、源皮距测量公式为
18、ssd为源皮距,是等中心点到虚源的距离;
19、d4为标定板的纵向长度;
20、d5为标定板的顶部两个三棱柱状测量柱的左右两端的间距;
21、d6为标定板的底部的两个三棱柱状测量柱的左右两端的间距;
22、d7为标定板的顶部两个三棱柱状测量柱在epid板上投影的最大间距;
23、d8为标定板的底部两个三棱柱状测量柱在epid板上投影的最大间距;
24、dc为标定板的上沿与中心测量柱的中心的间距。
25、中心测量柱的中心位于环形直线加速器的激光中心,也就是加速器等中心。
26、进一步优选地,所述标定块的顶部开设有上下设置的两个方形标定槽,两个方形标定槽中位于上方的方形标定槽的截面积大于位于下方的方形标定槽的截面积;
27、且方形标定槽的截面积为长方形。
28、进一步优选地,测量项目包括射野大小,测量项目是射野大小时,对应的预设计划包括4个射野,机架角度都为0°,准直器角度都为0°,4个射野的射野大小分别为:a厘米×a厘米,b厘米×b厘米,c厘米×c厘米,d厘米×d厘米;
29、4个射野的四个边长a、b、c、d分别与位于上方的方向标定槽的长度、宽度以及位于下方的方形标定槽的长度、宽度接近;
30、在预制计划中,要把方形标定槽的垂直中心移动到环形直线加速器等中心高度,再出束进行测量与校准;
31、获得4个射野对应影像中的方形标定槽的边界坐标与射野边界坐标,使用与射野大小最接近的方形标定槽的边界坐标进行影像的尺寸测量校准,进而从影像中计算出校准后的射野大小,并计算与预设射野大小的偏差。
32、4个射野的射野大小分别为:5厘米×5厘米,10厘米×10厘米,15厘米×15厘米,20厘米×20厘米。
33、测量项目包括测量移床精度时,测量移床精度时预制计划包含3个射野,3个射野的机架角度都为0°,准直器角度都为0°,按照计划中预设的位置,分别移动治疗床到三个不同的位置;
34、其中,通过获得边缘金属标记点的中心坐标的方法,分别获得3个射野对应epid影像中金属标记点中心的坐标,计算坐标偏移的距离,并计算与预设值的偏差,进而判断是否满足临床使用要求。
35、进一步优选地,所述标定块的前端安装有向前伸出的圆柱形测量柱组,所述圆柱形测量柱组包括位于中心的中心测量柱以及以所述中心测量柱为中心周向等间隔角度排布的外围测量柱;
36、所述中心测量柱的外径大于所有的外围测量柱的外径;
37、所述中心测量柱的轴向长度小于所有的外围测量柱的轴向长度。
38、通过圆形测量柱组投影到epid板上的投影画面,获知放疗治疗头机架的倾斜角度。
39、进一步优选地,所述外围测量柱的外径沿着第一周向递减,所述外围测量柱的轴向长度沿着第一周向递减。
40、进一步优选地,所述中心测量柱设置有一个,所述外围测量柱设置有八个。
41、使用模体本体测量机架角度时,预制计划中包含8个射野,8个射野的射野大小都为28厘米×28厘米,准直器角度都为0°,机架角度分别为0°、45°、90°、135°、180°、225°、270°和315°;
42、其中,通过获取当前机架角度下的epid影像,进而获取距离影像中心最近的两根外围测量柱的中心在epid板上的投影位置的方法,计算出机架角度;
43、
44、θ为机架角度;
45、d1为外围测量柱圆心到中心测量柱圆心的距离的两倍在epid上投影的长度;
46、d2为在当前任意机架角度下,模体的epid影像中,距离影像中心最近的两个外围测量柱圆心投影之间的距离。
47、进一步优选地,所述标定板的纵向长度为720mm;
48、所述标定板的顶部两个三棱柱状测量柱的左右两端的间距为136mm;
49、所述标定板的底部的两个三棱柱状测量柱的左右两端的间距为310mm。
50、进一步优选地,所述标定板的上沿所述中心测量柱的中心的间距为460mm。
51、质控模体,其特征在于,包括呈正方体状的标定块以及呈上宽下窄的等腰梯形的标定板;
52、所述标定块的底部安装有高度可调的支撑脚;
53、所述标定块与所述标定板可拆卸连接;
54、所述标定板的四个角部设置有三棱柱状测量柱;所述标定板上端的两个三棱柱状测量柱均设置有与所述标定板的顶面齐平的棱柱面;所述标定板下端的两个三棱柱状测量柱均设置有与所述标定板的底面齐平的棱柱面;
55、所述标定块上设置有与十字形激光线对位的定位结构,将十字形激光线与质控模体上的定位结构进行相互对位;
56、所述标定块的前端安装有向前伸出的圆柱形测量柱组,所述圆柱形测量柱组包括位于中心的中心测量柱以及以所述中心测量柱为中心周向等间隔角度排布的外围测量柱;
57、所述中心测量柱的外径大于所有的外围测量柱的外径;
58、所述中心测量柱的轴向长度小于所有的外围测量柱的轴向长度;
59、所述外围测量柱的外径沿着第一周向递减,所述外围测量柱的轴向长度沿着第一周向递减。
60、进一步优选地,所述标定块外露出所述标定板的区域的上侧、左侧以及右侧均设置有第一十字形激光定位线槽;
61、所述标定块的上下左右四侧均安装有金属标记点;
62、所述标定板的左侧壁以及右侧壁上均开设有第二十字形激光定位线槽。
63、本发明通过标定块以及标定板的结合,标定块摆放在治疗床上,通过第一十字形激光定位线槽与十字形激光线进行对位。当组装上标定板后,通过第二十字形激光定位线槽与十字形激光线进行对位。
64、通过标定块与标定板的可拆卸,便于存放收纳。通过三棱柱状测量柱,便于虚源照射导致三棱柱状测量柱投影到epid板上的投影画面,获知源皮距的尺寸,进行源皮距的校准。
65、进一步优选地,所述标定块的上侧、下侧、左侧以及右侧中的至少两侧设置有滑槽;
66、所述插孔的内侧设置有与所述滑槽滑动连接的滑块。
67、便于滑动插接。
68、进一步优选地,所述标定板四个角部的三棱柱状测量柱的长度不同。便于在投影画面上进行区分。
69、进一步优选地,所述标定块的顶部开设有上下设置的两个方形标定槽,两个方形标定槽中位于上方的方形标定槽的截面积大于位于下方的方形标定槽的截面积;
70、且方形标定槽的截面积为长方形。
71、本发明的有益效果是:
72、1)能够使医用环形直线加速器源皮距的测量更加便捷。
73、2)为医用环形直线加速器机架角度以及射野大小的测量提供了一种便捷、低成本且精准的方法。
74、3)使用本发明中集成化设计的多功能模体及对应的自动化机械质控方法,能够标准化、自动化地完成医用环形直线加速器的机械质控项目,从而提高临床质控流程的精确性,重复性和效率。
- 还没有人留言评论。精彩留言会获得点赞!