一种脉搏定位模型训练方法、电子设备及存储介质与流程
本技术涉及脉诊机器人,具体而言,涉及一种脉搏定位模型训练方法、电子设备及存储介质。
背景技术:
1、现有的脉诊机器人通常采用以下两种方法进行脉诊:1、机械臂对固定位置进行检测;2、将机械臂移动至脉搏定位模型预测的脉搏位置进行检测。第一种方法具体工作流程为:需要医护人员通过人工的方式进行脉诊,并将脉搏位置标记;将机械臂移动至脉搏位置正上方并控制机械臂下落,以使机械臂上的传感器能够接触到脉搏和进行脉诊,由于第一种方法需要先通过人工的方式标记脉搏位置,而在各种因素(例如机械臂的移动精度不足或记下的脉搏位置不精确)影响下容易出现脉搏定位不准确,机械臂上的传感器无法正确接触到脉位的情况,因此第一种方法存在由于需要先通过人工的方式标记脉搏位置而导致劳动强度大以及由于脉搏定位不准确,机械臂上的传感器无法正确接触到脉搏而导致无法采集到脉诊信息的问题。第二种方法对脉搏定位模型的预测精度要求高,脉搏定位模型的预测精度与训练时使用的数据集的标注精度相关联,现有的数据集包括多个经过标注的近红外图像,由于近红外图像仅能够看清手腕的静脉血管,因此医护人员需要依据经验在静脉血管的附近标注出脉搏位置,从而导致近红外图像中标注的脉搏位置精度低,进而导致脉搏定位模型的预测精度低。
2、针对上述问题,目前尚未有有效的技术解决方案。
技术实现思路
1、本技术的目的在于提供一种脉搏定位模型训练方法、电子设备及存储介质,能够有效地提高脉搏定位模型的预测精度和解决由于需要通过人工的方式标记脉搏位置而导致劳动强度大以及由于脉搏定位不准确,机械臂上的传感器无法正确接触到脉搏而导致无法采集到脉诊信息的问题。
2、第一方面,本技术提供了一种脉搏定位模型训练方法,应用在脉诊机器人中,脉诊机器人包括已标定的机械臂和视觉相机,机械臂末端固定有已标定的超声探测仪,视觉相机固定在机械臂一侧,视觉相机用于采集视觉图像,超声探测仪用于采集超声图像,脉搏定位模型训练方法包括以下步骤:
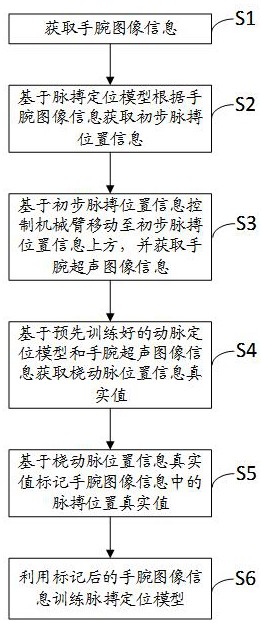
3、s1、获取手腕图像信息;
4、s2、基于脉搏定位模型根据手腕图像信息获取初步脉搏位置信息;
5、s3、基于初步脉搏位置信息控制机械臂移动至初步脉搏位置信息上方,并获取手腕超声图像信息;
6、s4、基于预先训练好的动脉定位模型和手腕超声图像信息获取桡动脉位置信息真实值;
7、s5、基于桡动脉位置信息真实值标记手腕图像信息中的脉搏位置真实值;
8、s6、利用标记后的手腕图像信息训练脉搏定位模型。
9、本技术提供的一种脉搏定位模型训练方法,先获取初步脉搏位置信息,并基于初步脉搏位置信息控制机械臂移动至初步脉搏位置信息上方,再基于动脉定位模型和手腕超声图像信息获取桡动脉位置信息真实值信息,并基于桡动脉位置信息真实值标记手腕图像信息中的脉搏位置真实值,最后利用标记后的手腕图像信息训练脉搏定位模型,即本技术相当于先基于超声探测仪的探测结果对手腕图像信息中的脉搏位置进行修正,再基于修正后的手腕图像信息对脉搏定位模型进行训练,由于标记后的手腕图像信息能够准确反映脉搏位置,即本技术能够有效地提高手腕图像信息中标注的脉搏位置精度,因此利用标记后的手腕图像信息对脉搏定位模型进行训练能够有效地提高脉搏定位模型的预测精度,而由于在完成脉搏定位模型的训练后,本技术的脉诊机器人可以直接利用脉搏定位模型预测的脉搏位置进行脉诊,因此本技术无需通过人工的方式标记脉搏位置,从而有效地解决由于需要通过人工的方式标记脉搏位置而导致劳动强度大以及由于脉搏定位不准确,机械臂上的传感器无法正确接触到脉搏而导致无法采集到脉诊信息的问题。
10、可选地,步骤s5包括:
11、s51、根据桡动脉位置信息真实值获取脉搏位置真实值,并在手腕图像信息中对脉搏位置真实值对应的位置进行标记。
12、可选地,根据桡动脉位置信息真实值获取脉搏位置真实值的步骤包括:
13、根据超声探测仪成像区域尺寸信息和超声图像分辨率计算像素尺寸信息;
14、根据桡动脉位置信息真实值、像素尺寸信息和超声图像分辨率获取对应的实际空间坐标信息;
15、根据实际空间坐标信息、预先标定的第一转换矩阵和第三转换矩阵获取脉搏位置真实值,第一转换矩阵为视觉相机到机械臂基座的转换矩阵,第三转换矩阵为超声探测仪到机械臂基座的转换矩阵。
16、可选地,步骤s5与步骤s6之间还包括步骤:
17、s7、根据初步脉搏位置信息和脉搏位置真实值获取脉搏偏移信息,并根据脉搏偏移信息控制机械臂移动;
18、s8、获取新的手腕超声图像信息,并重复执行步骤s4和步骤s5,以验证脉搏位置真实值是否准确。
19、该技术方案相当于重新获取一个新的脉搏位置真实值,并基于新的脉搏位置真实值验证旧的脉搏位置真实值是否准确,因此该技术方案能够有效地避免出现由于动脉定位模型的预测精度有限而导致桡动脉位置信息真实值并不能够准确反映实际位置信息,从而导致标记后的手腕图像信息也不能够准确反映脉搏位置,进而导致脉搏定位模型的预测精度下降的情况。
20、可选地,步骤s5包括:
21、s51’、根据桡动脉位置信息真实值和桡动脉目标位置信息获取桡动脉位置偏移信息;
22、s52、根据桡动脉位置偏移信息、预先标定的第一转换矩阵和预先标定的第三转换矩阵获取脉搏位置偏移信息,第一转换矩阵为视觉相机到机械臂基座的转换矩阵,第三转换矩阵为超声探测仪到机械臂基座的转换矩阵;
23、s53、根据脉搏位置偏移信息和初步脉搏位置信息获取脉搏位置真实值,并在手腕图像信息中对脉搏位置真实值对应的位置进行标记。
24、可选地,步骤s2包括:
25、s21、基于脉搏定位模型根据手腕图像信息获取初步脉搏位置信息,并在手腕图像信息中将初步脉搏位置信息记录为脉搏位置标签;
26、步骤s5包括:
27、s51’’、根据桡动脉位置信息真实值获取脉搏位置真实值,并利用脉搏位置真实值对脉搏位置标签进行更新。
28、可选地,脉搏位置真实值包括寸实际位置信息、关实际位置信息和尺实际位置信息。
29、可选地,动脉定位模型的预先训练过程包括以下步骤:
30、构建动脉定位模型;
31、利用超声图像数据集训练动脉定位模型,超声图像数据集包括多个预先标定的手腕超声标定图像。
32、第二方面,本技术还提供一种电子设备,包括处理器以及存储器,存储器存储有计算机可读取指令,当计算机可读取指令由处理器执行时,运行如上述第一方面提供的方法中的步骤。
33、第三方面,本技术提供一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时运行如上述第一方面提供的方法中的步骤。
34、由上可知,本技术提供的一种脉搏定位模型训练方法、电子设备及存储介质,先获取初步脉搏位置信息,并基于初步脉搏位置信息控制机械臂移动至初步脉搏位置信息上方,再基于动脉定位模型和手腕超声图像信息获取桡动脉位置信息真实值信息,并基于桡动脉位置信息真实值标记手腕图像信息中的脉搏位置真实值,最后利用标记后的手腕图像信息训练脉搏定位模型,即本技术相当于先基于超声探测仪的探测结果对手腕图像信息中的脉搏位置进行修正,再基于修正后的手腕图像信息对脉搏定位模型进行训练,由于标记后的手腕图像信息能够准确反映脉搏位置,即本技术能够有效地提高手腕图像信息中标注的脉搏位置精度,因此利用标记后的手腕图像信息对脉搏定位模型进行训练能够有效地提高脉搏定位模型的预测精度,而由于在完成脉搏定位模型的训练后,本技术的脉诊机器人可以直接利用脉搏定位模型预测的脉搏位置进行脉诊,因此本技术无需通过人工的方式标记脉搏位置,从而有效地解决由于需要通过人工的方式标记脉搏位置而导致劳动强度大以及由于脉搏定位不准确,机械臂上的传感器无法正确接触到脉搏而导致无法采集到脉诊信息的问题。
- 还没有人留言评论。精彩留言会获得点赞!