一种用于血管介入机器人的磁控球形反馈力闭环控制系统的制作方法
本技术一般涉及医疗装备制造,具体涉及一种用于血管介入机器人的磁控球形反馈力闭环控制系统。
背景技术:
1、心血管病已经成为全球疾病负担的主要原因。血管介入机器人为介入手术带来了巨大便利,因此具有广阔的应用前景。目前介入手术机器人主要采取主从式设计,可以通过术前电子计算机断层扫描数据和术中导丝磁定位、送管装置送管长度等信息来获得术中导丝在患者血管中的精确位置,并通过三维重建的血管图像直观地展现给医生。医生通过机械臂和夹持模块代替传统用手推送导管导丝,回避手术室中有害射线,从x射线的辐射中解脱出来,较大幅度地减少辐射的伤害。同时机器人主端部分通过对术前术中医学图像和力传感器等信息的融合处理,对手术进行实时预警,提醒医生避开血管内组织结构,引导医生将导丝送至病灶目的地。通过介入手术机器人辅助医生进行手术操作,可提高手术过程中的导丝定位精度与安全保障。
2、现有技术中,大多数介入机器人主端控制器的机械结构具有行程限制,当进行介入手术时,影响医生的操控体验;而目前采用操控球作为主端控制器的介入机器人是支气管镜手术机器人,不具备实时检测力反馈的功能,影响介入手术过程中操控人员对手术中力的感知与安全性。
技术实现思路
1、鉴于现有技术中的上述缺陷或不足,期望提供可解决上述技术问题的一种用于血管介入机器人的磁控球形反馈力闭环控制系统。
2、本技术提供一种用于血管介入机器人的磁控球形反馈力闭环控制系统,包括:
3、上位机,所述上位机与血管介入机器人连接,用于根据所述血管介入机器人反馈的工作阻力,生成反馈控制信号;所述反馈控制信号包含有目标磁场值,所述目标磁场值与目标反馈力一一对应,所述目标反馈力用于向操控人员表征所述血管介入机器人当前的工作阻力;
4、反馈力单元,所述反馈力单元响应于所述反馈控制信号,对应产生具有所述目标磁场值的磁场;
5、操控球单元,所述操控球单元包括操控球、传感装置以及设置于所述操控球内部的内置磁铁;所述内置磁铁受控于所述磁场并对所述操控球产生反馈力;所述传感装置的输入端与所述操控球连接,所述传感装置的输出端和所述上位机连接,所述传感装置用于检测所述操控球的运动信息数据,并将所述运动信息数据发送至所述上位机;
6、检测单元,所述检测单元的输入端设置于所述操控球单元的内部,所述检测单元的输出端与所述上位机连接,所述检测单元用于检测所述操控球所受到的实际反馈力,并将其发送至所述上位机;
7、其中,所述上位机还配置用于:计算所述实际反馈力与目标反馈力的差值,根据所述差值调整所述目标反馈力的大小。
8、根据本技术提供的技术方案,所述检测单元包括:
9、应变梁,所述应变梁设置有多个,多个所述应变梁设置在所述操控球内,所述操控球包括外壳和内壳,所述内壳的内部设置有所述内置磁铁,多个所述应变梁分别设置在所述外壳和所述内壳之间,且所述应变梁的两端分别与所述外壳和所述内壳固定连接;
10、应变片传感器,所述应变片传感器固定在所述外壳的内壁上,所述应变片传感器的应变片连接在所述应变梁的表面;
11、传输装置,所述传输装置设置在所述外壳和所述内壳之间,且固定在所述外壳的内壁上,所述传输装置的输入端和所述应变片传感器的输出端连接,所述传输装置的输出端和所述上位机连接。
12、根据本技术提供的技术方案,多个所述应变梁中分别两两相对设置在所述内壳和所述外壳之间,所述内壳上对应所述应变梁设置有第一插槽,所述外壳的内壁上对应所述应变梁设置有第二插槽,所述应变梁的两端分别插设在所述第一插槽和第二插槽内。
13、根据本技术提供的技术方案,所述传输装置包括:单片机模块、蓝牙模块以及电池模块,所述单片机模块、蓝牙模块以及电池模块分别通过固定块固定在所述外壳的内壁上,且分别位于两个应变梁之间;所述单片机模块的输入端和所述应变片传感器的输出端连接,所述单片机模块的输出端和所述蓝牙模块的输入端连接,所述蓝牙模块的输出端和所述上位机连接;所述电池模块分别与所述单片机模块、蓝牙模块和所述应变片传感器连接,所述电池模块用于为所述单片机模块、蓝牙模块和所述应变片传感器供电。
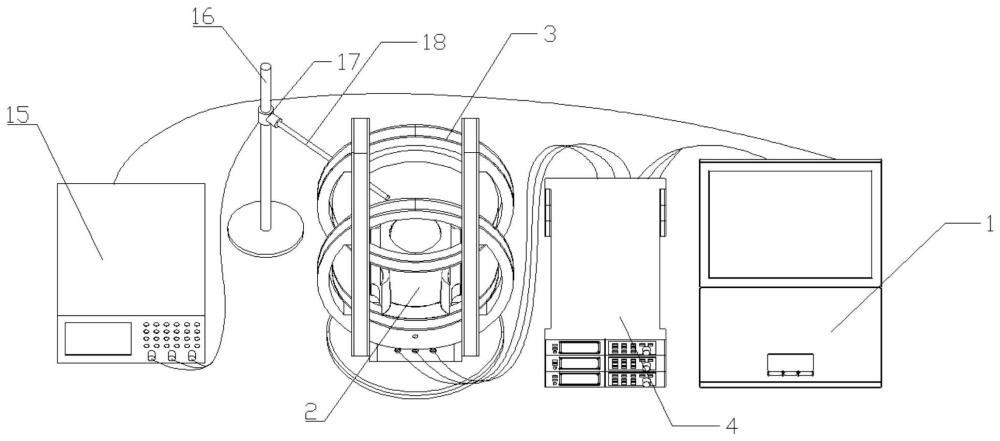
14、根据本技术提供的技术方案,所述反馈力单元包括:反馈力生成线圈装置和可编程供电电源;所述反馈力生成线圈装置内设置有所述操控球单元,所述可编程供电电源的输入端和所述上位机连接,所述可编程供电电源的输出端和所述反馈力生成线圈装置连接。
15、根据本技术提供的技术方案,还包括:
16、磁场检测单元,所述磁场检测单元包括磁场测试仪和探针组件,所述探针组件的输出端与所述磁场测试仪的输入端电连接,所述探针组件的输入端伸入所述反馈力生成线圈装置内壁,所述探针组件用于对所述反馈力生成线圈装置的磁场进行实时检测;所述磁场测试仪的输出端与所述上位机连接,所述磁场测试仪用于将磁场信息传输至所述上位机。
17、根据本技术提供的技术方案,所述探针组件包括:支架和探针,所述支架沿第一方向延伸,所述支架上套设有连接套,所述连接套上设有第三插槽,所述第三插槽沿第二方向延伸,所述探针的输出端插入所述第三插槽内,所述探针的输入端伸入所述反馈力生成线圈装置的内部,所述第二方向垂直于所述第一方向。
18、根据本技术提供的技术方案,所述操控球设置在壳体上,所述传感装置设置在所述壳体内,所述传感装置包括所述传感装置包括光学传感器、透明光学元件、光源和信号处理电路板,所述壳体内部设置有遮光罩,所述信号处理电路板设置在所述遮光罩内,所述光源、光学传感器和透明光学元件设置在所述信号处理电路板上,所述光源发出的光经过所述透明光学元件照射在所述操控球上再反射至所述光学传感器,所述光学传感器将光学信号转化为电信号后再经信号处理电路得到所述操控球的运动信息数据。
19、根据本技术提供的技术方案,所述电池模块为可充电锂电池,所述外壳上设有与所述可充电锂电池连通的充电口。
20、本技术的有益效果在于:
21、本技术提供一种用于血管介入机器人的磁控球形反馈力闭环控制系统,包括:上位机、反馈力单元、操控球单元和检测单元;使用时,操控人员控制所述操控球转动,所述传感装置检测所述操控球的运动信息数据并将其传输至上位机,所述上位机根据所述运动信息数据形成指挥所述血管介入机器人动作的控制信号,所述血管介入机器人在运动过程中会产生工作阻力并反馈给所述上位机,所述上位机根据所述血管介入机器人反馈的工作阻力,生成反馈控制信号,所述反馈控制信号包括与目标反馈力一一对应的目标磁场值;此时所述反馈力单元响应于所述反馈控制信号,对应产生具有所述目标磁场值的磁场,所述操控球内部的内置磁铁受控于所述磁场并对所述操控球产生反馈力;所述检测单元检测到所述操控球所受到的实际反馈力,并将其发送至所述上位机,实现对所述实际反馈力的实时检测与传输;所述上位机将收到的所述实际反馈力与所述目标反馈力做差值,根据所述差值调整所述目标反馈力的大小,实现闭环控制所述反馈力,进而提升所述操控人员感受到的反馈力的精准性,对操控人员的操作起到预警作用,提高手术的安全性。
- 还没有人留言评论。精彩留言会获得点赞!