实时监测手术钻位置的装置、系统、方法和存储介质与流程
本发明涉及医疗器械,特别是涉及实时监测手术钻位置的装置、系统、方法和存储介质。
背景技术:
1、利用手术机器人辅助执行的骨科手术操作,需要使用末端工具如手术钻等对骨组织进行钻孔等操作,目前多采用将手术钻插入到手术机器人末端的套筒中,由手术机器人末端的套筒限制手术钻的方向,以实现在脊椎的预期位置进行钻孔。但实际操作过程中,需要操作者对手术钻施加力作用,手术钻在工作过程中会频繁振动,造成手术钻的位置的偏移或者方向上的改变,而且在手术过程中也可能发生误操作,例如施加的力的方向略有偏移,也可能造成手术钻的位置或方向产生变化,这将导致手术钻钻孔的位置和深度产生偏差,对手术产生不利影响。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种实时监测手术钻位置的装置、系统、方法和存储介质,能够在手术过程中对手术钻的位置和方向进行实时监测,提高了手术的准确性和安全性。
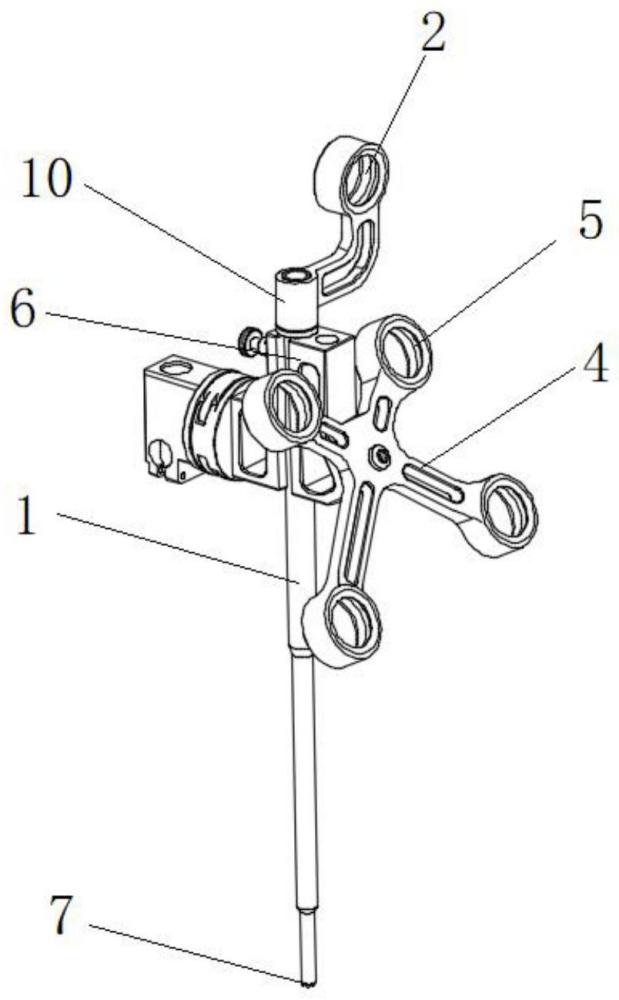
2、本发明的一方面提供了一种实时监测手术钻位置的装置,包括:手术钻套筒和示踪器,其中,
3、所述示踪器上设有至少三个示踪标识,所述示踪标识被配置为被光学定位仪识别,所述示踪器直接或间接连接于手术机器人末端;
4、所述手术钻套筒的近端设有定位标识,所述定位标识被配置为被光学定位仪识别,所述手术钻套筒的远端被配置为抵靠在骨面上。
5、在一个实施例中,所述手术钻套筒的近端设有定位机构,所述定位标识设于所述定位机构上。
6、在一个实施例中,所述光学定位仪被配置为获取包含有所述示踪标识和所述定位标识的图像数据。
7、在一个实施例中,所述定位标识可包括反光球或圆形的反光层。
8、在一个实施例中,所述示踪标识可以为反光球或圆形的反光层。
9、在一个实施例中,所述手术钻套筒的远端设有齿尖,所述齿尖用于抓紧骨面。
10、在一个实施例中,所述定位机构可拆卸连接的壳体和底座,所述壳体与所述套筒固定连接,所述底座上设有定位标识,所述壳体上设有通孔,所述底座的至少一部分位于所述通孔的内部,所述壳体上设有轮廓挡片,所述轮廓挡片用于遮挡部分定位标识。
11、在一个实施例中,所述定位标识为反光涂层或反光贴纸。
12、在一个实施例中,所述定位标识为反光球,所述反光球可拆卸连接于所述定位机构。
13、本发明的另一方面提供了一种实时监测手术钻位置的方法,包括步骤:
14、s1:利用光学定位仪获取带有定位标识和至少是哪个示踪标识的在同一时刻的两张图像数据,对每张图像数据利用双目视觉原理和数字信息拟合计算,分别得到定位标识对应的二维圆心点和至少三个示踪标识对应的二维圆心点。
15、s2:对步骤1得到的定位标识对应的二维圆心点和至少三个示踪标识对应的圆心点,利用双目视觉原理,计算出定位标识对应的三维圆心点和至少三个示踪标识对应的三维圆心点;
16、s3:根据步骤s2得到的定位标识对应的三维圆心点和至少三个示踪标识对应的三维圆心点,得到定位标识的相对位置信息。
17、在一个实施例中,所述光学定位仪为双目视觉定位装置。
18、在一个实施例中,所述光学定位仪包含至少两个相机,所述两张图像数据,分别通过不同的相机获得。
19、在一个实施例中,所述两个相机为高帧率相机。
20、在一个实施例中,利用双目视觉原理和数字信息拟合计算,包括以下步骤:
21、s1-1:将获得的图像进行轮廓提取,得到所述定位标识和/或示踪标识对应的轮廓点集;
22、s1-2:对步骤s1-1中得到的轮廓点集,采用椭圆拟合算法得到对应的二维圆心点。
23、在一个实施例中,所述步骤s1-1还包括对所述轮廓点集进行去畸变处理,得到去畸变后的轮廓点集,在步骤s1-2和步骤s1-3中的轮廓点集为去畸变处理后的轮廓点集。
24、在一个实施例中,在所述轮廓提取的方法,可以为边缘检测法、颜色分割法,形态学处理法、基于距离变换法、亚像素边缘提取法中的任意一种。
25、在一个实施例中,所述椭圆拟合算法,可以为最小二乘法、梯度下降法、最近点法中的任意一种。
26、在一个实施例中,所述椭圆拟合算法为最小二乘法。
27、在一个实施例中,所述步骤s3还包括,根据每个示踪标记对应的三维圆心点,得到示踪器的三维姿态,所述三维姿态包括所述示踪器的位置和方向信息,所述定位标识的相对位置信息为所述定位标识相对于所述示踪器的相对位置。
28、在一个实施例中,所述步骤s3中,所述定位标识的相对位置信息为定位标识的三维圆心点到每个示踪标识的三维圆心点的距离。
29、在一个实施例中,所述光学定位仪高频率获取图像数据,循环执行步骤s1到s3,可认为是实时监测定位标识的相对位置信息。
30、在一个实施例中,所述光学定位仪在相邻时刻获取图像数据的时间间隔为δt,δt的范围为0.01~0.06秒。
31、在一个实施例中,所述实时监测手术钻位置的方法,还包括步骤s4,当定位标识的相对位置信息符合预设条件时,发出预警信号。
32、本发明的另一个方面,提供了一种实时监测手术钻位置的系统,包括光学定位仪、数据处理模块、及显示模块;其中:光学定位模块被配置为获取包含定位标识和至少三个示踪标识的图像数据;数据处理模块被配置为对光学定位仪获取的图像数据进行数据处理;显示模块被配置为显示定位标识和/或示踪标识的位置。
33、在一个实施例中,所述实时监测手术钻位置的系统还包括预警模块,所述预警模块被配置为发出预警信号。
34、本发明的另一个方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使所述计算机执行实时监测手术钻位置的方法。
35、与现有技术相比,本发明具有如下的有益效果:
36、1、通过手术钻套筒限制手术钻的位置和方向,提高手术的准确度;并且通过手术钻套筒上设置的定位标识与连接于手术机器人末端的示踪器上的示踪标识之间的距离判断手术钻套筒是否离开骨面或者位置发生偏移,从而得到手术钻是否可能发生偏移。
37、2、通过高频获取图像数据及数据处理,可实现实时监测手术钻套筒手术钻套筒是否离开骨面或者位置发生偏移、判断手术钻是否处于准确的位置和方向,并在符合预设条件时发出预警信号,提示操作者或医生,以便于操作者或医生能够及时调整。
技术特征:
1.实时监测手术钻位置的装置,其特征在于,包括:手术钻套筒和示踪器,其中:
2.根据权利要求1所述的实时监测手术钻位置的装置,其特征在于,所述定位标识为球形或圆形。
3.根据权利要求1所述的实时监测手术钻位置的装置,其特征在于,所述手术钻套筒的远端设有齿尖,所述齿尖用于抓紧骨面。
4.一种实时监测手术钻位置的方法,其特征在于,包括以下步骤:
5.根据权利要求4所述的实时监测手术钻位置的方法,其特征在于,所述步骤s1中,利用双目视觉原理和数字信息拟合计算,包括以下步骤:
6.根据权利要求5所述的实时监测手术钻位置的方法,其特征在于,所述轮廓提取的方法为为边缘检测法、颜色分割法,形态学处理法、基于距离变换法、亚像素边缘提取法中的任意一种;所椭圆拟合算法,为最小二乘法、梯度下降法、最近点法中的任意一种。
7.根据权利要求4所述的实时监测手术钻位置的方法,其特征在于,所述步骤s3还包括,根据每个示踪标记对应的三维圆心点,得到示踪器的三维姿态,所述三维姿态包括所述示踪器的位置和方向信息,所述定位标识的相对位置信息为所述定位标识相对于所述示踪器的相对位置。
8.根据权利要求4所述的实时监测手术钻位置的方法,其特征在于,还包括步骤s4,当定位标识的相对位置信息符合预设条件时,发出预警信号。
9.实时监测手术钻位置的系统,其特征在于,包括光学定位仪、数据处理模块、及显示模块;其中:光学定位仪被配置为获取包含定位标识和至少三个示踪标识的图像数据;数据处理模块被配置为对光学定位仪获取的图像数据进行数据处理;显示模块被配置为显示定位标识和/或示踪标识的位置。
10.实时监测手术钻位置的存储介质,其特征在于,所述存储介质存储有计算机指令,所述计算机指令用于使所述计算机执行实时监测手术钻位置的方法。
技术总结
本发明提供了一种实时监测手术钻位置的装置、系统、方法和存储介质,所述方法包括:步骤S1:利用光学定位仪获取同一时刻的两张图像数据,对每张图像数据利用双目视觉原理和数字信息拟合计算,分别得到定位标识对应的二维圆心点和每个示踪标识对应的圆心点;S2:利用双目视觉原理,计算出定位标识对应的三维圆心点和至少三个示踪标识对应的三维圆心点;S3:得到定位标识的相对位置信息。本发明通过手术钻套筒限制手术钻的位置和方向,同时通过监测手术钻套筒上的定位标识监测手术钻的钻孔位置和方向,能够实时判断手术钻是否处于预期的位置和方向,有利于提高手术的准确性和安全性。
技术研发人员:张开港,沈旻昊,刘鹏程,马科威,曾建军
受保护的技术使用者:上海嘉奥信息科技发展有限公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!