一种上挑悬臂的康复机器人减重系统
本发明属于医用设备,具体涉及一种上挑悬臂的康复机器人减重系统。
背景技术:
1、偏瘫主要表现为一侧上、下肢的肢体瘫痪,可伴有半身感觉障碍失语失认失用以及视野缺损等症状。根据2007年的统计数据,我国年龄超过55岁的人口占据19.8%,因而老人和偏瘫患者的康复和训练成为当前的焦点。
2、当人体在受到损伤后,身体虽然具有一定的自我恢复能力,但如果不及时用药或者进行功能训练,将会导致一些功能无法恢复到原来的水平。传统的人工康复训练方法是在下肢功能障碍患者在进行减重步行训练时,康复训练师不断重复的对患者进行辅助和校正腿部姿态,实现康复治疗。这种康复训练效率低、成本高、康复训练师劳动强度大,并且康复训练的效果与康复训练师的水平密切相关,难以进行大范围推广应用。现有的康复机器人主要以固定式为主,设备成本高,患者在固定场所被动训练,不能产生真实行走感觉,患者在使用过程中舒适性差、自主性差、应用局限性强。
3、一般的下肢康复机器人,包括减重系统和方管框架。减重系统一般主要由电机、绕线轮、弹簧和钢丝绳组成,通过电机带动绕线轮收卷钢丝绳,拉动弹簧伸长,从而实现减重。然而一般的减重系统都与框架多为一体设计,且功能单一,只能将人吊在固定位置。对于人体的减重,减重值无法精准控制或控制难得较高。同时,减重系统的钢丝绳在长期使用后末端固定处容易松动,存在一定的安全隐患。在很多减重系统中,存在一个类似杠杆的结构,使患者可以更舒适的穿戴使用,但与此同时也对弹簧的弹性系数及电机的扭矩有更高的要求。所以现有技术中的减重系统仍有进一步改进的必要,为适应可移动式康复机器人的需要,还应增加辅助站立、患者行动意图识别、高度调节等功能。
技术实现思路
1、有鉴于此,本发明提供了一种上挑悬臂的康复机器人减重系统,能够实现对患者下肢随动减重,并识别患者运动意图,使患者可以在空旷场地随意移动。
2、本发明是通过下述技术方案实现的:
3、一种上挑悬臂的康复机器人减重系统,其特征在于,包括:拉力调节驱动组件、拉力调节组件及悬臂机构;
4、拉力调节组件包括:结构外壳、滑轨b、两个承载板及两个以上拉伸弹簧;
5、结构外壳安装在康复机器人的龙门架上,滑轨b竖直安装在结构外壳的一个侧面的内壁上,令所述内壁为面a;滑轨b上滑动连接两个滑块b;
6、两个承载板一一对应安装在两个滑块b上;
7、拉伸弹簧安装在两个承载板之间;
8、拉力调节驱动组件用于驱动位于顶部的承载板沿竖直方向移动,并对顶部的承载板进行位置锁定;
9、悬臂机构与底部的承载板连接;
10、减重系统的悬臂机构通过绑带与患者的腰部和髋部连接,随着患者的走动悬臂机构带动底部的承载板沿滑轨b向下移动,拉伸弹簧向下拉伸,为患者提供弹性支撑,实现减重。
11、进一步的,其特征在于,所述减重系统还包括高度调节组件和高度调节驱动组件;
12、所述高度调节组件包括:滑块c和滑轨c;
13、所述滑轨c的两端装有两个安装板;所述滑块c与滑轨c间滑动连接;
14、所述高度调节驱动组件包括:驱动电机b、丝杆螺母b及丝杆b;
15、所述丝杆b的两端分别通过轴承安装在滑轨c的两个安装板上;所述丝杆螺母b可拆卸安装在滑块c上;所述丝杆b与滑块c上的丝杆螺母b螺纹配合,滑块b在丝杆b的带动下,沿着滑轨c做升降运动;所述丝杆b通过驱动电机驱动旋转;
16、所述拉力调节组件的结构外壳的另一个侧面安装在高度调节组件的滑块c上。
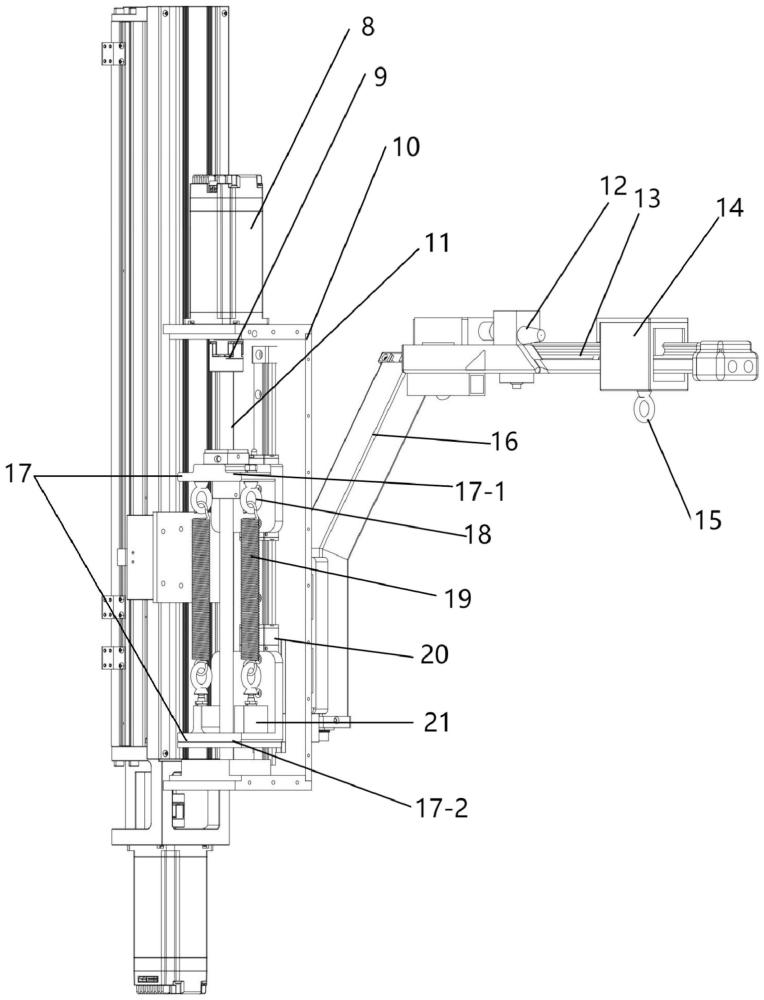
17、进一步的,其特征在于,所述悬臂机构包括:悬臂组件和悬臂连接块,悬臂组件通过悬臂连接块安装在底部的承载板上;
18、所述悬臂组件包括:弯管、悬臂滑轨、悬臂滑块及吊环a;
19、所述弯管由杆a和杆b组成;所述杆b竖直安装在悬臂连接块上,杆a倾斜安装在杆b上;
20、所述悬臂滑轨水平安装在杆a上,悬臂滑轨上滑动连接有悬臂滑块,悬臂滑块沿悬臂滑轨做往复运动;
21、所述吊环a安装在悬臂滑块的底部;所述绑带安装在所述吊环a上。
22、进一步的,其特征在于,所述悬臂机构还包括:滑块a和滑轨a;
23、所述滑轨a竖直安装在面a的外侧壁上,滑块a与滑轨a滑动连接;
24、所述悬臂连接块与滑块a固连。
25、进一步的,其特征在于,所述面a上滑轨b的两侧分别加工有一个大小相同的矩形通孔;
26、所述底部的承载板由矩形板和u型板一体成型;所述底部的承载板的u型板穿过面a上滑轨b两侧的通孔;所述通孔a位于底部的承载板的底板处;
27、所述悬臂连接块安装在底部的承载板伸出滑轨b两侧矩形通孔的u型板上。
28、进一步的,所述悬臂组件还包括:位移传感器;
29、所述位移传感器安装在悬臂滑轨上,用于测量位移传感器与悬臂滑块间的距离;位移传感器与悬臂滑块间的距离用于判断患者的行动意图。
30、进一步的,所述拉力调节组件还包括:拉力传感器;
31、所述拉力传感器安装在一个拉伸弹簧和底部的承载板之间,用于测量单个拉伸弹簧所产生的拉力;其余的拉伸弹簧与底部的承载板之间装有凸块位于下方的,用于每个和拉伸弹簧的拉伸长度保持一致。
32、进一步的,所述拉力调节驱动组件包括:驱动电机a、丝杆螺母a及丝杆a;
33、所述丝杆螺母a安装在顶部的承载板上,底部的承载板上加工有通孔a,通孔a与丝杆螺母a同轴;
34、丝杆a依次穿过安装孔c和通孔a,丝杆a的两端分别通过轴承安装在结构外壳的顶面和底面;丝杆螺母a与丝杆a螺纹配合;
35、所述驱动电机a的输出轴与丝杆a的上端连接,用于驱动丝杆a的转动。
36、进一步的,所述拉伸弹簧的一端通过吊环b安装在顶部的承载板上,拉伸弹簧的另一端通过吊环b安装在底部的承载板上;
37、安装在底部的承载板上的若干吊环b之间相互平行,安装在顶部的承载板上的若干吊环b之间相互平行;每个所述吊环b通过螺母紧固。
38、有益效果:
39、(1)本发明的一种上挑悬臂的康复机器人减重系统,包括:拉力调节驱动组件、拉力调节组件及悬臂组件;所述减重系统体积小、质量轻且工作原理简单,可以使患者可以在空旷地带随意走动进行下肢康复训练,患者进行康复训练更加舒适,也拥有一定的自主性,可以提高康复训练效果;传统的减重系统通过类似杠杆的结构进行施力,而本发明的减重系统通过底部的承载板直接将力传给悬臂组件,能够避免因力臂短而使所需弹簧力很大的问题,可以提升弹簧的使用寿命;拉伸弹簧不仅可以提供减重力,还能在患者行走时,随人体重心变化进行一定的缩放,起到一定的缓冲作用,从而具有更高的舒适性;所述减重系统使用滑轨导向,与以往采用双光轴进行导向的减重系统相比较,本发明的减重系统体积小、重量小,能够使康复机器人易于移动。
40、(2)本发明的一种上挑悬臂的康复机器人减重系统,还包括高度调节组件和高度调节驱动组件;通过高度调节组件能够调节拉力调节驱动组件、拉力调节组件、悬臂组件即悬臂连接块的整体高度,使得减重系统可以适用于不同身高的患者,增加身高适用范围。
41、(3)本发明的一种上挑悬臂的康复机器人减重系统,滑块a与滑轨a滑动连接,悬臂连接块与滑块a固连,悬臂连接块同时与底部的承载板和滑块a固连,使得悬臂连接块能够更加稳定的沿滑轨a做升降运动,提高减重机构的稳定性。
42、(4)本发明的一种上挑悬臂的康复机器人减重系统,悬臂组件还包括位移传感器,通过位移传感器可测量悬臂滑块与位移传感器之间的距离,能够判断患者的行动意图,再跟据行动意图由龙门架底部的移动系统带动龙门架跟随患者移动,从而达到辅助康复的作用。
43、(5)本发明的一种上挑悬臂的康复机器人减重系统,拉力传感器安装在一个拉伸弹簧和底部承载板之间,能够测量单个拉伸弹簧所产生的拉力;每个拉伸弹簧的拉伸长度保持一致,通过单个拉伸弹簧所产生的拉力能够定量调节减重值。
44、(6)本发明的一种上挑悬臂的康复机器人减重系统,所述拉力调节驱动组件中使用了滑动丝杆,可以调节拉伸弹簧的弹簧力,使拉伸弹簧的拉力能够与不同患者的下肢力量相匹配;由于丝杆的驱动力很小,并可以在到达指定位置后,可以利用丝杆的特性进行自锁,因此无需配备蜗轮蜗杆减速器等部件,使得减重系统整体体积更加小巧,重量减轻,移动更加方便,还能够降低电机损耗。
45、(7)本发明的一种上挑悬臂的康复机器人减重系统,拉伸弹簧的一端通过吊环b安装在顶部的承载板上,拉伸弹簧的另一端通过吊环b安装在底部的承载板上;吊环通过螺母紧固,能够保证位于底部的承载板上的吊环b的方向始终保持平行、位于顶部的承载板上的吊环b的方向始终保持平行,能够避免吊环b18对拉伸弹簧19施加扭转,同时安装拉伸弹簧更加便利。
- 还没有人留言评论。精彩留言会获得点赞!