一种电磁导航发生装置、方法及系统与流程
本说明书实施例涉及电磁导航,特别涉及一种电磁导航发生装置、方法及系统。
背景技术:
1、磁导航是指通过磁场的变化来控制位于磁场中磁性体,按照事先设定方式进行移动。磁场变化包括磁场大小以及方向的变化。
2、在介入手术领域,若要通过磁场来控制病人血管内的介入导管移动一般需要的磁场强度在0.05t-0.1t左右,产生上述磁场强度的磁场所需的磁体体积一般较大,传统手术中需要通过控制两块体型庞大的永磁体不停变换空间位置,通过改变永磁体产生磁场的磁场方向和磁场大小来驱动血管内的磁性导管进行对应手术动作。
3、有鉴于此,如何高效控制介入器械在血管中的运动,成为当前亟需解决的技术问题。
技术实现思路
1、有鉴于此,本说明书实施例提供了一种电磁导航发生装置。本说明书一个或者多个实施例同时涉及一种应用于电磁导航发生装置端的电磁导航发生方法、一种应用于电磁导航发生装置端的电磁导航发生装置、一种应用于用户端的电磁导航发生方法、一种应用于用户端的电磁导航发生装置、以及一种电磁导航发生系统,一种计算设备以及一种计算机可读存储介质,以解决现有技术中存在的技术缺陷。
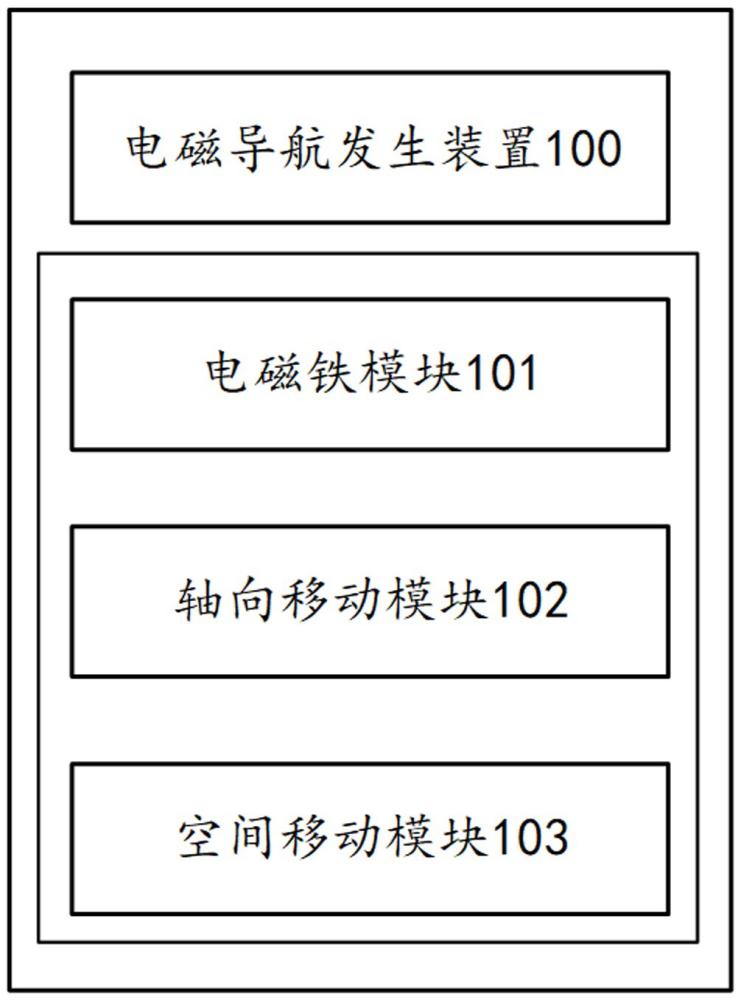
2、根据本说明书实施例的第一方面,提供了一种电磁导航发生装置,包括:
3、电磁铁模块,用于控制血管介入器械移动至目标位置,其中,所述电磁铁模块中包括至少两组电磁铁单元,每组电磁铁单元中包括两块电磁铁,各组的两块电磁铁基于电磁铁底座相对设置;
4、轴向移动模块,用于控制所述电磁铁和所述血管介入器械沿轴向方向移动,其中,所述轴向移动模块包括升降单元和电机驱动单元,所述升降单元用于控制所述电磁铁的运动方向,所述电机驱动单元用于控制所述血管介入器械头端的行驶方向,所述运动方向包括上升或下降,所述行驶方向包括前进或后移;
5、空间移动模块,通过电磁铁线包单元实现将输入电流生成磁场,使得所述电磁铁生成组合磁场,基于所述组合磁场,确定所述介入器械头端的所指方向,用于根据所述介入器械头端的指向和轴向移动方向,控制血管介入器械移动至目标位置,其中,所述空间移动模块包括双极程控电源单元,所述双极程控电源单元用于为所述电磁铁模块供电,以使所述电磁铁模块产生组合磁场,所述组合磁场包括任意方向的磁场。
6、根据本说明书实施例的第二方面,提供了一种电磁导航发生方法,应用于电磁导航发生装置端,包括:
7、接收工作站主机系统发送的目标指令,其中,所述目标指令为控制血管介入器械移动到目标位置的指令;
8、基于所述目标指令,通过电机驱动单元控制所述血管介入器械头端的行驶方向,通过升降单元控制电磁铁模块中的至少一个电磁铁的运动方向,其中,所述行驶方向为控制所述血管介入器械的前进或后退,所述运动方向为控制所述电磁铁上升或下降;
9、基于所述目标指令,确定所述电磁铁模块中各个电磁铁的组合电流,其中,所述组合电流包括各个所述电磁铁的电流强度和电流方向;
10、启动双极程控电源,基于所述组合电流,为所述电磁铁模块中各个电磁铁进行供电,生成所述电磁铁模块的组合磁场,其中,所述组合磁场包括任意方向的磁场;
11、基于所述组合磁场,控制血管介入器械头端的所指方向,并根据所述介入器械头端的指向和行驶方向,控制所述血管介入器械移动到目标位置。
12、根据本说明书实施例的第三方面,提供了一种电磁导航发生装置,应用于电磁导航发生装置端,包括:
13、接收模块,被配置为接收工作站主机系统发送的目标指令,其中,所述目标指令为控制血管介入器械移动到目标位置的指令;
14、轴向控制模块,被配置为基于所述目标指令,通过电机驱动单元控制所述血管介入器械头端的行驶方向,通过升降单元控制电磁铁模块中的至少一个电磁铁的运动方向,其中,所述行驶方向为控制所述血管介入器械的前进或后退,所述运动方向为控制所述电磁铁上升或下降;
15、电流确定模块,被配置为基于所述目标指令,确定所述电磁铁模块中各个电磁铁的组合电流,其中,所述组合电流包括各个所述电磁铁的电流强度和电流方向;
16、磁场生成模块,被配置为启动双极程控电源,基于所述组合电流,为所述电磁铁模块中各个电磁铁进行供电,生成所述电磁铁模块的组合磁场,其中,所述组合磁场包括任意方向的磁场;
17、移动模块,被配置基于所述组合磁场,控制血管介入器械头端的所指方向,并根据所述介入器械头端的指向和行驶方向,控制所述血管介入器械移动到目标位置。
18、根据本说明书实施例的第四方面,提供了一种电磁导航发生方法,应用于用户端,包括:
19、通过血管造影系统,获取介入器械在血管内的实时位置;
20、基于所述实时位置,通过所述血管造影系统发送目标指令至工作站主机系统,其中,所述目标指令为控制血管介入器械移动至目标位置的指令。
21、根据本说明书实施例的第五方面,提供了一种电磁导航发生装置,应用于用户端,包括:
22、获取模块,被配置为通过血管造影系统,获取介入器械在血管内的实时位置;
23、发生模块,被配置为基于所述实时位置,通过所述血管造影系统发送目标指令至工作站主机系统,其中,所述目标指令为控制血管介入器械移动至目标位置的指令。
24、根据本说明书实施例的第六方面,提供了一种电磁导航发生系统,其特征在于,包括:
25、血管造影系统,用于获取介入器械在血管内的实时位置,并在用户端界面进行展示;
26、用户端,用于基于所述实时位置,通过所述血管造影系统,发送目标指令至工作站主机系统;
27、工作站主机系统,用于接收所述目标指令,并对所述目标指令进行分析,生成分析结果,将所述分析结果至电磁导航发生装置,其中,所述分析结果包括血管介入器械头端的行驶方向,电磁铁模块中各个电磁铁的运动方向,以及双极程控电源为电磁铁模块中各个电磁体进行供电的组合;
28、电磁导航发生装置端,用于接收工作站主机系统发送的目标指令;基于所述目标指令,通过电机驱动单元控制所述血管介入器械头端的行驶方向,通过升降单元控制电磁铁模块中的至少一个电磁铁的运动方向;基于所述目标指令,确定所述电磁铁模块中各个电磁铁的组合电流;启动双极程控电源,基于所述组合电流,为所述电磁铁模块中各个电磁铁进行供电,生成所述电磁铁模块的组合磁场;基于所述组合磁场,控制血管介入器械头端的所指方向,并根据所述介入器械头端的指向和行驶方向,控制所述血管介入器械移动到目标位置。
29、根据本说明书实施例的第七方面,提供了一种计算机设备,包括:
30、存储器和处理器;
31、所述存储器用于存储计算机可执行指令,所述处理器用于执行所述计算机可执行指令,该计算机可执行指令被处理器执行时实现上述电磁导航发生方法的步骤。
32、根据本说明书实施例的第八方面,提供了一种计算机可读存储介质,其存储有计算机可执行指令,该指令被处理器执行时实现上述电磁导航发生方法的步骤。
33、本说明书一个实施例提供的电磁导航发生装置,通过电磁铁模块实现将血管介入器械移动至目标位置,其中,所述电磁铁模块中包括至少两组电磁铁单元,每组电磁铁单元中包括两块电磁铁,各组的两块电磁铁基于电磁铁底座相对设置;轴向移动模块,用于控制所述电磁铁和所述血管介入器械沿轴向方向移动,其中,所述轴向移动模块包括升降单元和电机驱动单元,所述升降单元用于控制所述电磁铁的运动方向,所述电机驱动单元用于控制所述血管介入器械头端的行驶方向,所述运动方向包括上升或下降,所述行驶方向包括前进或后移;空间移动模块,通过电磁铁线包单元实现将输入电流生成磁场,使得所述电磁铁生成组合磁场,基于所述组合磁场,确定所述介入器械头端的所指方向,用于根据所述介入器械头端的指向和轴向移动方向,控制血管介入器械移动至目标位置,其中,所述空间移动模块包括双极程控电源单元,所述双极程控电源单元用于为所述电磁铁模块供电,以使所述电磁铁模块产生组合磁场,所述组合磁场包括任意方向的磁场。
34、应用本说明书实施例提供的装置,通过对至少四个电磁铁单元的电流控制,即可实现水平平面360度方向内任意磁场方向的控制,通过升降单元控制手术床两侧的电磁铁模块的升降,使手术床两侧的电磁铁模块存在一定高度差,即可实现垂直方向内垂直分磁场的控制,由垂直分磁场来控制导管或导丝在垂直方向上的操控。因此,本说明书实施例提供的装置不需要通过电磁铁的空间位置变换来控制磁场方向和磁场强度大小,相较于传统方式,磁场变换效率更高,能够更高效控制磁导管和导丝进行运动,且对手术室空间要求较低,能够适配更多手术室环境。
- 还没有人留言评论。精彩留言会获得点赞!