旋转关节、机械臂及手术机器人的制作方法
本申请涉及医疗器械,尤其涉及一种旋转关节、机械臂及手术机器人。
背景技术:
1、手术机器人作为一种辅助医生进行手术的医疗器械,通常会配置一条可移动的用于安装并定位各类负载的机械臂,负载可以为末端执行工具或末端扫描工具等。例如,当负载为摄像头时,机械臂可以带动摄像头移动,以在术前以及术中对各类设备或器械、阵列进行定位导航。为了使得负载的移动范围更大,或为了使得负载的位姿种类更多,常常需要机械臂上的运动关节具有旋转和升降功能。
2、传统的手术机器人中,需要通过旋转关节调整负载的位姿,转动旋转关节时所需的转动力较大,转动过程较为不便。
技术实现思路
1、本申请提供了一种旋转关节、机械臂及手术机器人,能够解决传统的机械臂在转动时转动力较大的问题。
2、第一方面,本申请实施例提供了一种旋转关节,包括第一基座和第二基座,所述第一基座用于连接负载,所述第一基座可相对于所述第二基座绕第一轴线转动;所述旋转关节还包括第一阻尼机构和第二阻尼机构,所述第一阻尼机构用于向所述第一基座施加绕所述第一轴线的且沿第一方向的第一作用力,所述第二阻尼机构用于向所述第一基座施加绕所述第一轴线的且沿所述第一方向的第二作用力,且所述第二作用力大于所述第一作用力,所述第一作用力和所述第二作用力用于共同提供所述第一基座相对于所述第二基座转动时的阻尼力。
3、在其中的一些实施例中,所述第二基座连接有第一旋转轴,所述第一旋转轴贯穿所述第一基座和所述第二基座,所述第一基座可围绕所述第一旋转轴相对于所述第二基座转动;所述第二阻尼机构包括扭转弹性件,所述第一旋转轴穿设于所述扭转弹性件,所述扭转弹性件的一端与所述第一基座相连接,所述扭转弹性件的另一端与所述第二基座相连接,所述扭转弹性件用于向所述第一基座施加所述第二作用力。
4、在其中的一些实施例中,所述第一基座和所述第二基座中的至少一者设置有多个连接部,多个所述连接部围绕所述第一旋转轴的轴线间隔设置,所述扭转弹性件与其中一个所述连接部可拆卸地连接。
5、在其中的一些实施例中,所述第二基座还有主体部,所述主体部设置有异形孔,所述第一旋转轴穿设于所述异形孔内,所述异形孔具有相对的两个第一限位面,所述第一旋转轴具有相对的两个第二限位面,且所述第一限位面与所述第二限位面相贴合。
6、在其中的一些实施例中,所述第一基座设置有第一抵持部,所述第一旋转轴具有第二抵持部,所述第一阻尼机构位于所述第一抵持部和所述第二抵持部之间;所述第一阻尼机构包括第一弹性件、第一止推垫片和第一摩擦片,所述第一弹性件的两端分别抵持所述第二抵持部和所述第一止推垫片,所述第一止推垫片抵持所述第一摩擦片,所述第一摩擦片与所述第一抵持部相连接,且所述第一摩擦片与所述第一止推垫片之间的摩擦力为所述第一作用力。
7、在其中的一些实施例中,所述第一旋转轴和所述第二基座中的一者设置有止位部,所述第一基座设置有两个限位部,所述限位部沿所述第一旋转轴的周向间隔设置,且所述止位部位于两个所述限位部之间。
8、第二方面,本申请实施例提供了一种机械臂,包括如第一方面所述的旋转关节。
9、在其中的一些实施例中,所述机械臂还包括第三基座和第三阻尼机构,所述第三基座设置有第二旋转轴,所述第二旋转轴通过所述第三阻尼机构与所述第二基座转动连接,且所述第二旋转轴相对于所述第二基座转动的轴线垂直于所述第一轴线,所述第三阻尼机构用于提供所述第二旋转轴相对于所述第二基座转动时的阻尼力。
10、在其中的一些实施例中,所述机械臂还包括底座、第四基座和第四阻尼机构,所述第四基座的一端与所述第三基座远离所述第二基座的一端转动连接,所述第四基座的另一端通过所述第四阻尼机构与所述底座转动连接,且所述第四基座相对于所述第三基座转动的轴线与所述第四基座相对于所述底座转动的轴线均平行于所述第二旋转轴相对于所述第二基座转动的轴线,所述第四阻尼机构用于提供所述第四基座相对于所述底座转动时的阻尼力。
11、在其中的一些实施例中,所述机械臂还包括摄像组件和把手组件,所述摄像组件作为所述负载并与所述第一基座相连接。
12、在其中的一些实施例中,所述把手组件还包括把手、按压弹性件、按钮和与所述摄像组件电性连接的微动开关,所述把手与所述第一基座相连接,所述按钮滑动设于所述把手上,所述按压弹性件设于所述按钮与所述把手之间,所述按钮用于被按压以使所述按压弹性件收缩,并使所述按钮触发所述微动开关。
13、第三方面,本申请实施例提供了一种手术机器人,所述手术机器人包括如第二方面所述的机械臂。
14、本申请实施例提供的旋转关节,有益效果在于:由于第一基座用于连接负载,第一基座可相对于第二基座绕第一轴线转动,旋转关节还包括第一阻尼机构和第二阻尼机构,第一阻尼机构用于向第一基座施加绕第一轴线且沿第一方向的第一作用力,第二阻尼机构用于向第一基座施加绕第一轴线且沿第一方向的第二作用力,且第二作用力大于第一作用力,第一作用力和第二作用力用于共同提供第一基座相对于第二基座转动时的阻尼力,所以可以通过第二阻尼机构平衡掉负载所受的大部分重力,并通过第一阻尼机构补充第二作用力与负载所受的重力的差异值,从而在需要通过旋转关节调整负载的位姿时,只需调整第一阻尼机构向第一基座施加的第一作用力的大小即可,所需转动力较小,能够解决传统的机械臂在转动时转动力较大的问题。
15、本申请提供的机械臂相比于现有技术的有益效果与本申请提供的手术机器人相比于现有技术的有益效果,均与本申请提供的旋转关节相比于现有技术的有益效果相似,此处不再赘述。
技术特征:
1.一种旋转关节,其特征在于,包括第一基座(10)和第二基座(20),所述第一基座(10)用于连接负载(50),所述第一基座(10)可相对于所述第二基座(20)绕第一轴线转动;所述旋转关节还包括第一阻尼机构(30)和第二阻尼机构(40),所述第一阻尼机构(30)用于向所述第一基座(10)施加绕所述第一轴线的且沿第一方向的第一作用力,所述第二阻尼机构(40)用于向所述第一基座(10)施加绕所述第一轴线的且沿所述第一方向的第二作用力,且所述第二作用力大于所述第一作用力,所述第一作用力和所述第二作用力用于共同提供所述第一基座(10)相对于所述第二基座(20)转动时的阻尼力。
2.根据权利要求1所述的旋转关节,其特征在于,所述第二基座(20)连接有第一旋转轴(60),所述第一旋转轴(60)贯穿所述第一基座(10)和所述第二基座(20),所述第一基座(10)可围绕所述第一旋转轴(60)相对于所述第二基座(20)转动;所述第二阻尼机构(40)包括扭转弹性件,所述第一旋转轴(60)穿设于所述扭转弹性件,所述扭转弹性件的一端与所述第一基座(10)相连接,所述扭转弹性件的另一端与所述第二基座(20)相连接,所述扭转弹性件用于向所述第一基座(10)施加所述第二作用力。
3.根据权利要求2所述的旋转关节,其特征在于,所述第一基座(10)和所述第二基座(20)中的至少一者设置有多个连接部(11),多个所述连接部(11)围绕所述第一旋转轴(60)的轴线间隔设置,所述扭转弹性件与其中一个所述连接部(11)可拆卸地连接。
4.根据权利要求2所述的旋转关节,其特征在于,所述第二基座(20)还有主体部(23),所述主体部(23)设置有异形孔,所述第一旋转轴(60)穿设于所述异形孔内,所述异形孔具有相对的两个第一限位面,所述第一旋转轴(60)具有相对的两个第二限位面,且所述第一限位面与所述第二限位面相贴合。
5.根据权利要求2所述的旋转关节,其特征在于,所述第一基座(10)设置有第一抵持部(12),所述第一旋转轴(60)具有第二抵持部(61),所述第一阻尼机构(30)位于所述第一抵持部(12)和所述第二抵持部(61)之间;所述第一阻尼机构(30)包括第一弹性件(31)、第一止推垫片(32)和第一摩擦片(33),所述第一弹性件(31)的两端分别抵持所述第二抵持部(61)和所述第一止推垫片(32),所述第一止推垫片(32)抵持所述第一摩擦片(33),所述第一摩擦片(33)与所述第一抵持部(12)相连接,且所述第一摩擦片(33)与所述第一止推垫片(32)之间的摩擦力为所述第一作用力。
6.根据权利要求2所述的旋转关节,其特征在于,所述第一旋转轴(60)和所述第二基座(20)中的一者设置有止位部(22),所述第一基座(10)设置有两个限位部(13),所述限位部(13)沿所述第一旋转轴(60)的周向间隔设置,且所述止位部(22)位于两个所述限位部(13)之间。
7.一种机械臂,其特征在于,包括如权利要求1至6中任意一项所述的旋转关节。
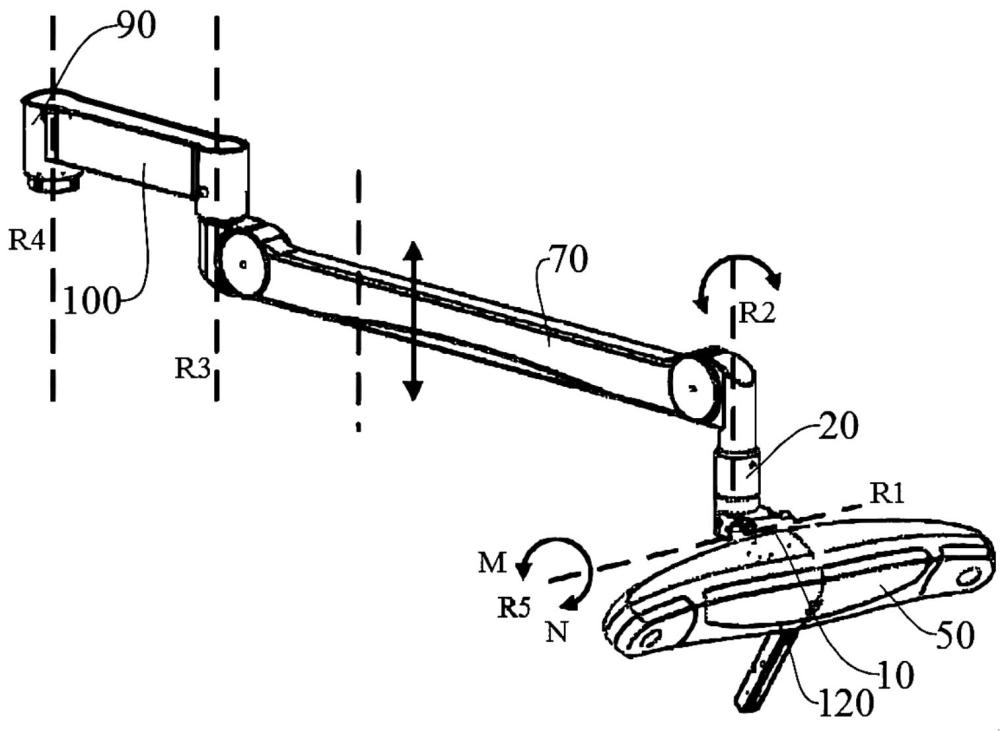
8.根据权利要求7所述的机械臂,其特征在于,所述机械臂还包括第三基座(70)和第三阻尼机构(80),所述第三基座(70)设置有第二旋转轴(71),所述第二旋转轴(71)通过所述第三阻尼机构(80)与所述第二基座(20)转动连接,且所述第二旋转轴(71)相对于所述第二基座(20)转动的轴线垂直于所述第一轴线,所述第三阻尼机构(80)用于提供所述第二旋转轴(71)相对于所述第二基座(20)转动时的阻尼力。
9.根据权利要求8所述的机械臂,其特征在于,所述机械臂还包括底座(90)、第四基座(100)和第四阻尼机构(110),所述第四基座(100)的一端与所述第三基座(70)远离所述第二基座(20)的一端转动连接,所述第四基座(100)的另一端通过所述第四阻尼机构(110)与所述底座(90)转动连接,且所述第四基座(100)相对于所述第三基座(70)转动的轴线与所述第四基座(100)相对于所述底座(90)转动的轴线均平行于所述第二旋转轴(71)相对于所述第二基座(20)转动的轴线,所述第四阻尼机构(110)用于提供所述第四基座(100)相对于所述底座(90)转动时的阻尼力。
10.根据权利要求7所述的机械臂,其特征在于,所述机械臂还包括摄像组件和把手组件(120),所述摄像组件作为所述负载(50)并与所述第一基座(10)相连接。
11.根据权利要求10所述的机械臂,其特征在于,所述把手组件(120)还包括把手(121)、按压弹性件(122)、按钮(123)和与所述摄像组件电性连接的微动开关(124),所述把手(121)与所述第一基座(10)相连接,所述按钮(123)滑动设于所述把手(121)上,所述按压弹性件(122)设于所述按钮(123)与所述把手(121)之间,所述按钮(123)用于被按压以使所述按压弹性件(122)收缩,并使所述按钮(123)触发所述微动开关(124)。
12.一种手术机器人,其特征在于,所述手术机器人包括如权利要求7至11中任意一项所述的机械臂。
技术总结
本申请涉及医疗器械技术领域,公开了一种旋转关节、机械臂及手术机器人,旋转关节包括第一基座和第二基座,第一基座用于连接负载,第一基座可相对于第二基座绕第一轴线转动;旋转关节还包括第一阻尼机构和第二阻尼机构,第一阻尼机构用于向第一基座施加绕第一轴线的且沿第一方向的第一作用力,第二阻尼机构用于向第一基座施加绕第一轴线的且沿第一方向的第二作用力,且第二作用力大于第一作用力,第一作用力和第二作用力用于共同提供第一基座相对于第二基座转动时的阻尼力。本申请提供的旋转关节、机械臂及手术机器人,能够解决传统的机械臂在转动时转动力较大的问题。
技术研发人员:刘鹏
受保护的技术使用者:武汉联影智融医疗科技有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!