主动驱动肠道内窥机器人系统
本发明涉及肠道疾病医疗用具,具体涉及一种主动驱动肠道内窥机器人系统。
背景技术:
1、结直肠癌colorectal cancer,crc)是全球发病率第三高的癌症,是致死率排第二的癌症病种。如果结肠癌在早期阶段能够被检测出来,那么其预后的存活率将可达90%,世界卫生组织who建议年龄在50岁以上或者有结肠癌家族史的人,每隔5年进行一次常规性结肠癌筛查。
2、结直肠筛查的常用方法包括粪便隐血测试、结肠镜检查、柔性乙状结肠镜、ct扫描等,结肠镜当前仍然是结直肠癌筛查的主要手段。研究表明,当前的推进式结肠内窥镜带来的微创及强烈不舒适感,仍是有待解决的关键问题。
3、基于仿生原理的肠道机器人内窥镜intestinal robotic endoscope,ire是当前研究热点。但在临床应用中仍有诸多问题,仿生机器人难于自动适应肠道复杂的曲折幽闭通道结构,前行驱动过程中极易对肠壁产生较大的摩擦和冲击,从而对肠道造成创伤。现有的肠道机器人内窥镜通常是通过电刺激在肠道内驱动,然后拍摄肠道内的图像,由于肠道拍摄环境较差,仅依靠肠道机器人拍摄肠道图像作为肠道疾病的诊断资料不够充足。
技术实现思路
1、针对现有技术存在的不足,本发明提出一种主动驱动肠道内窥机器人系统,以解决现有技术中存在的肠道机器人获取肠道诊断资料不足的问题。
2、第一方面,本发明提供一种主动驱动肠道内窥机器人系统。
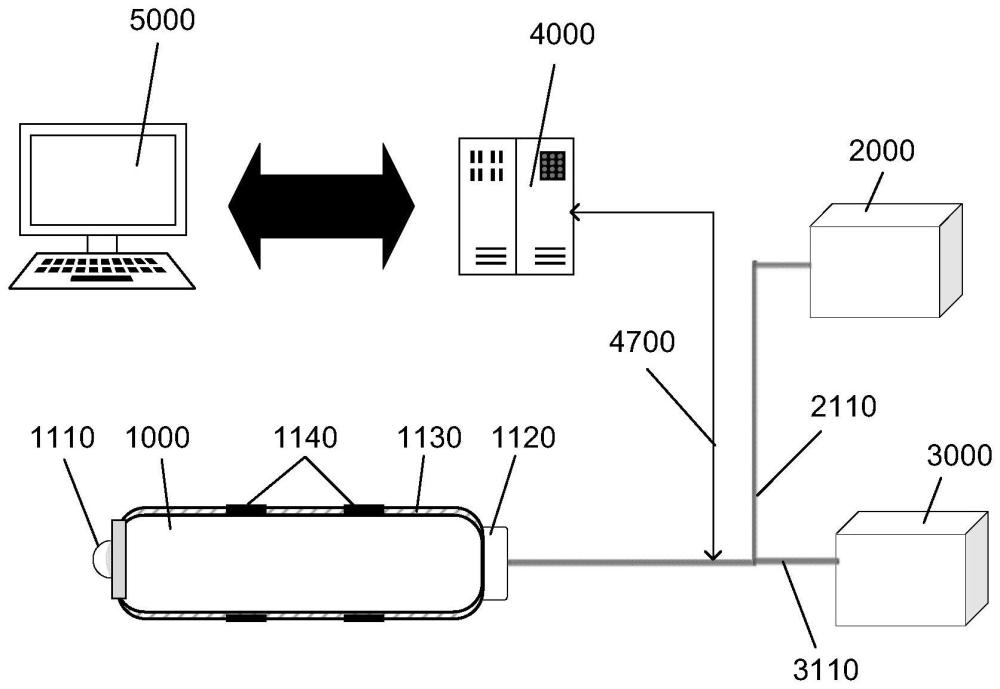
3、在第一种可实现方式中,一种主动驱动肠道内窥机器人系统,包括:肠道内窥机器人,位于患者肠道内,肠道内窥机器人通过电缆与体外工作站双向通信连接,肠道内窥机器人用于获取肠道信息,并将肠道信息发送到体外工作站;肠道内窥机器人包括主动驱动体、摄像模块和柔性外壳;摄像模块,柔性衔接于主动驱动体前端,用于采集肠道内的图像,获得肠道图像信息;柔性外壳,包裹于主动驱动体外,柔性外壳的前端、中部和后端的表面附着多个压力传感器;肠道气体分析仪,位于患者体外,肠道气体分析仪通过第一硅胶软管与肠道内窥机器人连接,肠道气体分析仪用于采集肠道气体并分析肠道气体成分;肠道液体分析仪,位于患者体外,肠道液体分析仪通过第二硅胶软管与肠道内窥机器人连接,肠道液体分析仪用于采集肠道液体并分析肠道液体成分;体外工作站,位于患者体外,体外工作站用于接收并存储肠道信息;体外工作站还用于根据肠道信息获取肠道的病灶和解剖学结构图像;上位机,与体外工作站通信连接,上位机用于接收并显示体外工作站传输的肠道信息,以及病灶和解剖学结构图像。
4、结合第一种可实现方式,在第二种可实现方式中,主动驱动体包括生物驱动体,生物驱动体包括通过生物技术改良或基因改造的鳝鱼、蛔虫或线虫;生物驱动体表面附着多个神经电极,神经电极包括柔性三维阵列电极或表面贴片电极;生物驱动体后端柔性衔接释药仓,释药仓用于释放药物。
5、结合第一种可实现方式,在第三种可实现方式中,主动驱动体还包括人造肌肉驱动体,人造肌肉驱动体由4个硅胶气囊、外层硅胶套、线缆保护套、总线模块、硅胶连接件、4个圆形后盖和4个圆形头盖组成,硅胶气囊为圆柱形,硅胶气囊的两侧分别固接后盖和头盖,两个相邻的气囊的头盖和后盖通过硅胶连接件中心固接,后盖外侧设置有4个钢丝导向座,4个钢丝导向座呈对称分布,头盖外侧设置有4个钢丝导向座和1个硅胶管导向座,钢丝导向座对称固定于头盖和后盖之间,钢丝导向座固接多股钢丝,每个气囊连接4根多股钢丝,多股钢丝的另一端连接总线缆模块,线缆保护套包裹总线缆模块,每个头盖的外侧设置有1个硅胶管导向座,每个硅胶导向座固定1个硅胶管,每个硅胶管与硅胶气囊密封连通,硅胶管的另一端连接总线缆模块。
6、结合第一种可实现方式,在第四种可实现方式中,主动驱动体还包括电磁驱动体,电磁驱动体包括六边形柱状薄板、电磁铁、软体空腔、凹槽嵌套体和总线模块;其中每个六边形柱状薄板的两面分别均匀布置六个条状电磁铁;其中一面的六个电磁铁上分别装凹槽嵌套体,用胶粘接;在另一面六边形柱状薄板中心把软体空腔用胶粘接,从而组成所述电磁驱动体的一个基本结构单元;由基本结构单元沿着软体空腔的中心线,依次连接构成所述电磁驱动体;首尾两端各自连接端盖和尾盖;端盖中心与总线模块中心对齐,用胶粘接;端盖由基本结构单元去掉有软体空腔那一侧的软体空腔和电磁铁构成;尾盖由基本结构单元去掉有凹槽嵌套体那一侧的凹槽嵌套体和电磁铁构成;利用电磁铁通电时有磁性,断电时磁性消失,同时结合软体空腔的弹性,通过总线模块控制不同的电磁铁组通断电,达到多个点位的控制,从而实现直行、转弯、抬头、蜿蜒爬行多自由度动作;
7、通过给六边形柱状薄板每一面上相对的电磁铁通电,实现驱动体直行动作;通过给六边形柱状薄板左/右侧的电磁铁通电,实现机器人向左/右转弯动作;通过给六边形柱状薄板上侧的电磁铁通电,实现驱动体抬头动作;通过给六边形柱状薄板左/右上侧电磁铁通电,使驱动体重心失稳,实现驱动体向左/右翻滚动作。
8、结合第一种可实现方式,在第五种可实现方式中,肠道气体分析仪包括气体采集模块、气体检测模块、气体存储模块和废气处理模块:气体检测模块包括气体反应腔室、气体传感器阵列模块、密封块、橡胶垫圈和电动推杆;气体传感器阵列模块固定于气体反应腔室内壁;密封块和气体反应腔室内壁滑动连接;橡胶垫圈固定于密封块的一侧;电动推杆固定于密封块的另一侧;气体采集模块包括第一硅胶软管、第三硅胶软管、第四硅胶软管、第五硅胶软管、第一电磁阀、第二电磁阀、第三电磁阀、第四电磁阀和气泵;第一硅胶软管固定有第一电磁阀,第一硅胶软管连接肠道内窥机器人与气体反应腔室;第三硅胶软管上固定有第二电磁阀,第三硅胶软管连通空气和气体反应腔室;第四硅胶软管固定有第三电磁阀,第四硅胶软管连通肠道气体存储模块与气体反应腔室。第五硅胶软管固定有第四电磁阀,第五硅胶软管连通废气处理模块与气体反应腔室。
9、结合第一种可实现方式,在第六种可实现方式中,肠道液体分析仪包括工作台;工作台上设置有真空仓,真空仓内壁上对称安装有两个限位板,两个限位板之间设置有载片台,限位板上转动安装有传动杆,传动杆垂直固定于真空仓内壁,传动杆中段安装有摆动杆,摆动杆另一端设置有漏斗,漏斗位于真空仓内,且漏斗的底端位于载片台正上方,真空仓顶部设置有观察口,观察口下方安装有透光板,漏斗可配合传动杆转动至观察口的正下方,观察口位于载片台正上方;真空仓一侧安装有排气管,工作台上安装有真空泵,真空泵的作用端安装有抽气管;抽气管和排气管连接;工作台上安装有培养仓,培养仓上安装有水泵,水泵的输出端设置有第六硅胶软管,第六硅胶软管可延伸至漏斗正上方;培养仓的上方安装有第二硅胶软管;工作台上安装有显微镜,显微镜位于真空仓正上方,且显微镜的功能端位于观察口正上方。
10、结合第二种可实现方式,在第七种可实现方式中,体外工作站包括图像分析单元、刺激单元、释药单元、压力反馈单元、肠道气体分析单元和肠道液体分析单元:图像分析单元,用于根据肠道图像信息获取肠道的病灶和解剖学结构图像;压力反馈单元,用于根据肠道压力信息进行肠道压力预警;刺激单元用于对生物驱动体发出电刺激控制指令;释药单元用于向肠道内窥机器人定时发送释药控制指令,以控制肠道内的释药模块进行定点和定时释药;压力反馈单元,用于根据肠道压力信息进行肠道压力预警并反馈调节肠道内窥机器人的运动;肠道气体分析单元,用于对肠道气体信息进行分类识别;肠道液体分析单元,用于对肠道液体成分进行分析。
11、结合第七种可实现方式,在第八种可实现方式中,图像分析单元包括:体外图像识别模块,用于从肠道图像信息中识别体外图像数据,获得肠道内部图像,并将肠道内部图像输出给无效图像识别模块;无效图像识别模块,用于对肠道内部图像中预设亮度范围之外的无效图像进行处理,获得肠道有效图像,并将肠道有效图像输出给病灶和解剖学结构识别模块;病灶和解剖学结构识别模块,用于对肠道有效图像进行检测识别,识别出肠道有效图像中的病灶和解剖学结构,获得备选肠道病灶和解剖学结构图像,并将备选肠道病灶和解剖学结构图像输出给病灶和解剖学结构冗余图像识别模块;病灶和解剖学结构冗余图像识别模块通过以下方式识别备选肠道病灶和解剖学结构图像中的冗余图像信息:基于病灶和解剖学结构在各备选肠道病灶和解剖学结构图像位置的中心坐标,获取病灶和解剖学结构的位置评分;基于备选肠道病灶和解剖学结构图像序列中各张图像的病灶和解剖学结构的宽和高,获取病灶和解剖学结构的尺寸评分;根据备选肠道病灶和解剖学结构图像中相邻像素的灰度差和灰度差的出现概率,获取病灶和解剖学结构在每张图像中所占区域的对比度评分;根据病灶和解剖学结构的位置评分、尺寸评分和对比度评分获取各备选肠道病灶和解剖学结构图像的总评分;将总评分最大值对应的备选肠道病灶和解剖学结构图像确定为最终的肠道病灶和解剖学结构图像。
12、结合第七种可实现方式,在第九种可实现方式中,体外工作站通过以下步骤实现对肠道气体信息的分类识别,包括:获取肠道气体样本数据,并对肠道气体样本数据进行预处理;对预处理后的肠道气体样本数据进行降维处理,获得肠道降维数据;采用肠道气体分类算法对肠道气体降维数据进行分类,获得各肠道气体类型的肠道降维数据;根据各肠道气体类型的降维数据获得判别函数;判别函数采用不同的字母或数字代表不同的肠道气体类型;基于判别函数对肠道气体信息进行处理,分类识别肠道气体类型。
13、结合第二种可实现方式,在第十种可实现方式中,生物驱动体采用维养系统进行能量供给,维养系统包括储水单元和能量供给单元,储水单元包括低位蓄水池、高位蓄水池、抽水泵和曝气装置;高位蓄水池设在低位蓄水池以及营养供给单元的上方,曝气装置的输出端与低位蓄水池连通,抽水泵的输入端与低位蓄水池通过管道连通,抽水泵的输出端与高位蓄水池通过管道连通;营养供给单元包括多个短时营养供给单元、多个长时营养供给单元和多个进水管,高位蓄水池通过多个进水管与多个短时营养供给单元及多个长时营养供给单元分别连通,每个进水管上均设有进水阀,多个短时营养供给单元和多个长时营养供给单元的底部均设有排水口,每个排水口均连接有排水阀。
14、由上述技术方案可知,本发明的有益技术效果如下:
15、本发明通过肠道内窥机器人可以获取肠道图像信息和肠道压力信息,并将上述肠道信息发送给体外工作站,体外工作站获取病灶和解剖学结构图像,然后通过上位机对肠道信息和肠道疾病进行显示。主动驱动肠道内窥机器人系统还可以采集肠道气体和肠道液体,并通过肠道气体分析仪和肠道液体分析仪分别分析肠道气体和液体成分。相比现有技术中仅仅获得肠道图像信息,本主动驱动肠道内窥机器人系统可以有提供更多肠道诊断资料,解决了现有技术中存在的肠道内窥机器人获取肠道诊断资料不足的问题。
- 还没有人留言评论。精彩留言会获得点赞!