一种内镜操控台车的控制方法及相关装置与流程
本技术涉及医疗器械,尤其涉及一种内镜操控台车的控制方法、内镜操控台车的控制装置及服务器。
背景技术:
1、消化道、呼吸道等自然腔道是人类常见疾病的好发部位,由于病灶处于人体自然腔道的内部,需要通过软式内镜进行检查或治疗。
2、随着机器人辅助技术的发展,内镜操控系统(也称作内镜机器人)应运而生。其中,内镜操控系统包括电助力驱动的内镜操控台车。
3、通常情况下,内镜操控台车常采用麦克纳姆轮的差速运动实现转向。然而,上述方法的转向半径大,难以应用于地形复杂的手术室,难以在狭窄的区域实现大角度调整姿态。
技术实现思路
1、本技术提供了一种内镜操控台车的控制方法,该方法确保内镜操控台车的平稳移动,实现内镜操控台车在手术室等狭窄区域的移动。本技术还提供了上述方法对应的内镜操控台车的控制装置及服务器。
2、第一方面,本技术提供了一种内镜操控台车的控制方法,所述内镜操控台车包括四个麦克纳姆轮,所述方法包括:
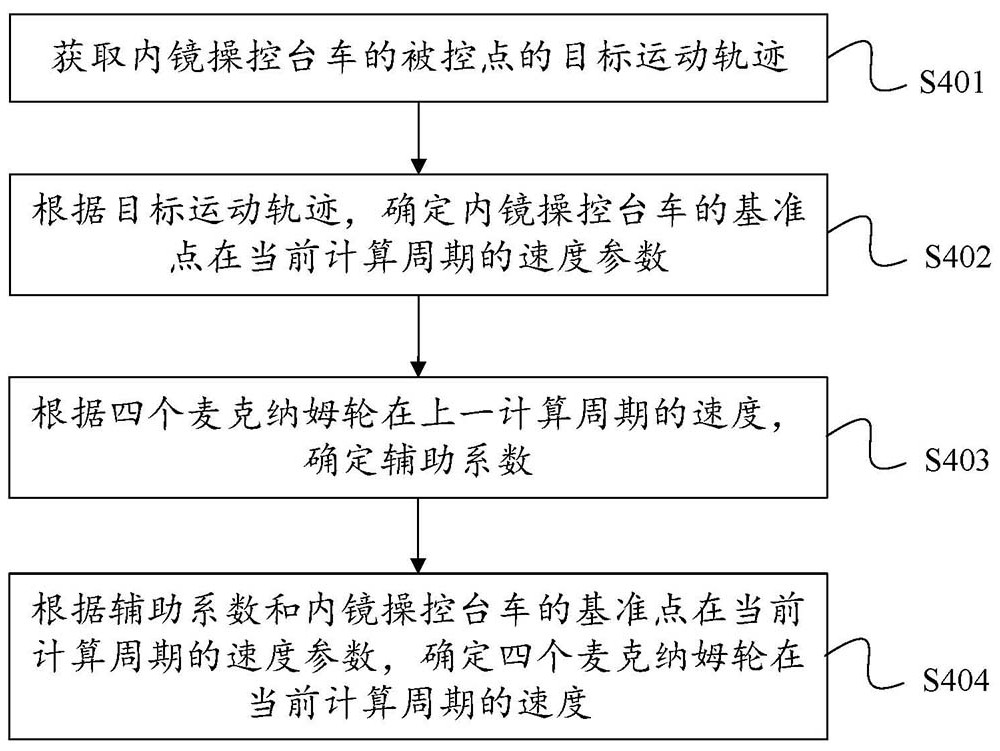
3、获取内镜操控台车的被控点的目标运动轨迹;
4、根据所述目标运动轨迹,确定所述内镜操控台车的基准点在当前计算周期的速度参数,所述速度参数包括所述基准点在第一方向上的速度、所述基准点在第二方向上的速度和所述基准点的角速度;
5、根据所述四个麦克纳姆轮在上一计算周期的速度,确定辅助系数;
6、根据所述辅助系数和所述内镜操控台车的基准点在当前计算周期的速度参数,确定所述四个麦克纳姆轮在当前计算周期的速度。
7、在一些可能的实现方式中,所述根据所述四个麦克纳姆轮在上一计算周期的速度,确定辅助系数,包括:
8、随机选取第一系数,所述第一系数表征所述四个麦克纳姆轮在当前计算周期的速度与所述四个麦克纳姆轮在上一计算周期的速度之间的比例;
9、根据所述第一系数和所述四个麦克纳姆轮在上一计算周期的速度,确定与所述第一系数对应的、所述四个麦克纳姆轮在当前计算周期的第一速度;
10、当所述四个麦克纳姆轮在当前计算周期的第一速度与所述四个麦克纳姆轮在上一计算周期的速度之间的差异满足第一设定条件,将所述第一系数确定为辅助系数。
11、在一些可能的实现方式中,所述根据所述四个麦克纳姆轮在上一计算周期的速度,确定辅助系数,包括:
12、随机选取第二系数,所述第二系数表征所述四个麦克纳姆轮中任意两个麦克纳姆轮的速度之和与所述四个麦克纳姆轮的速度之和之间的比例;
13、根据所述第二系数,确定与所述第二系数对应的、所述四个麦克纳姆轮在当前计算周期的第二速度;
14、当所述四个麦克纳姆轮在当前计算周期的第二速度、所述四个麦克纳姆轮在上一计算周期的速度和所述四个麦克纳姆轮的额定速度之间的关系满足第二设定条件,将所述第二系数确定为辅助系数。
15、在一些可能的实现方式中,所述当所述四个麦克纳姆轮在当前计算周期的第二速度、所述四个麦克纳姆轮在上一计算周期的速度和所述四个麦克纳姆轮的额定速度之间的关系满足第二设定条件,将所述第二系数确定为辅助系数,包括:
16、确定所述四个麦克纳姆轮在当前计算周期的第二速度与所述四个麦克纳姆轮在上一计算周期的速度之间的第一差异,以及确定所述四个麦克纳姆轮在当前计算周期的第二速度与所述四个麦克纳姆轮的额定速度之间的第二差异;
17、当所述第一差异与所述第二差异之间的和满足第二设定条件,将所述第二系数确定为辅助系数。
18、在一些可能的实现方式中,所述根据所述目标运动轨迹,确定所述内镜操控台车的基准点在当前计算周期的速度参数,包括:
19、根据所述目标运动轨迹,确定所述内镜操控台车的被控点在当前计算周期的速度参数;
20、根据所述内镜操控台车的被控点在当前计算周期的速度参数、所述内镜操控台车的被控点与所述内镜操控台车的基准点之间的变换关系,确定所述内镜操控台车的基准点在当前计算周期的速度参数。
21、在一些可能的实现方式中,在获取内镜操控台车的被控点的目标运动轨迹之前,所述方法还包括:
22、获取作用于所述内镜操控台车的被控点的作用力;
23、针对每个计算周期,根据所述作用力,确定所述内镜操控台车的被控点在当前计算周期的位移增量;
24、根据所述每个计算周期的位移增量,确定所述内镜操控台车的被控点的运动轨迹,以使所述内镜操控台车位于初始位置。
25、在一些可能的实现方式中,所述针对每个计算周期,根据所述作用力,确定所述内镜操控台车的被控点在当前计算周期的位移增量,包括:
26、当所述内镜操控台车的被控点的作用力大于设定作用力阈值,根据所述设定作用力阈值,确定所述内镜操控台车的被控点在当前计算周期的位移增量。
27、在一些可能的实现方式中,所述方法还包括:
28、发送提示信息,所述提示信息用于针对作用于内镜操控台车的被控点的作用力进行提示。
29、第二方面,本技术提供了一种内镜操控台车的控制装置,所述装置包括:
30、获取模块,用于获取内镜操控台车的被控点的目标运动轨迹;
31、第一确定模块,用于根据所述目标运动轨迹,确定所述内镜操控台车的基准点在当前计算周期的速度参数,所述速度参数包括所述基准点在第一方向上的速度、所述基准点在第二方向上的速度和所述基准点的角速度;
32、第二确定模块,用于根据四个麦克纳姆轮在上一计算周期的速度,确定辅助系数;
33、第三确定模块,用于根据所述辅助系数和所述内镜操控台车的基准点在当前计算周期的速度参数,确定所述四个麦克纳姆轮在当前计算周期的速度。
34、在一些可能的实现方式中,所述第二确定模块具体用于:
35、随机选取第一系数,所述第一系数表征所述四个麦克纳姆轮在当前计算周期的速度与所述四个麦克纳姆轮在上一计算周期的速度之间的比例;
36、根据所述第一系数和所述四个麦克纳姆轮在上一计算周期的速度,确定与所述第一系数对应的、所述四个麦克纳姆轮在当前计算周期的第一速度;
37、当所述四个麦克纳姆轮在当前计算周期的第一速度与所述四个麦克纳姆轮在上一计算周期的速度之间的差异满足第一设定条件,将所述第一系数确定为辅助系数。
38、在一些可能的实现方式中,所述第二确定模块具体用于:
39、随机选取第二系数,所述第二系数表征所述四个麦克纳姆轮中任意两个麦克纳姆轮的速度之和与所述四个麦克纳姆轮的速度之和之间的比例;
40、根据所述第二系数,确定与所述第二系数对应的、所述四个麦克纳姆轮在当前计算周期的第二速度;
41、当所述四个麦克纳姆轮在当前计算周期的第二速度、所述四个麦克纳姆轮在上一计算周期的速度和所述四个麦克纳姆轮的额定速度之间的关系满足第二设定条件,将所述第二系数确定为辅助系数。
42、在一些可能的实现方式中,所述第二确定模块具体用于:
43、确定所述四个麦克纳姆轮在当前计算周期的第二速度与所述四个麦克纳姆轮在上一计算周期的速度之间的第一差异,以及确定所述四个麦克纳姆轮在当前计算周期的第二速度与所述四个麦克纳姆轮的额定速度之间的第二差异;
44、当所述第一差异与所述第二差异之间的和满足第二设定条件,将所述第二系数确定为辅助系数。
45、在一些可能的实现方式中,所述第一确定模块具体用于:
46、根据所述目标运动轨迹,确定所述内镜操控台车的被控点在当前计算周期的速度参数;
47、根据所述内镜操控台车的被控点在当前计算周期的速度参数、所述内镜操控台车的被控点与所述内镜操控台车的基准点之间的变换关系,确定所述内镜操控台车的基准点在当前计算周期的速度参数。
48、在一些可能的实现方式中,所述装置还包括第四确定模块,所述第四确定模块用于:
49、获取作用于所述内镜操控台车的被控点的作用力;
50、针对每个计算周期,根据所述作用力,确定所述内镜操控台车的被控点在当前计算周期的位移增量;
51、根据所述每个计算周期的位移增量,确定所述内镜操控台车的被控点的运动轨迹,以使所述内镜操控台车位于初始位置。
52、在一些可能的实现方式中,所述第四确定模块具体用于:
53、当所述内镜操控台车的被控点的作用力大于设定作用力阈值,根据所述设定作用力阈值,确定所述内镜操控台车的被控点在当前计算周期的位移增量。
54、在一些可能的实现方式中,所述装置还包括提示模块,所述提示模块用于:
55、发送提示信息,所述提示信息用于针对作用于内镜操控台车的被控点的作用力进行提示。
56、第三方面,本技术提供了一种服务器。所述服务器包括处理器和存储器,所述存储器中存储有指令,所述处理器执行所述指令,以使所述服务器执行如本技术第一方面或第一方面的任一种实现方式所述的方法。
57、本技术在上述各方面提供的实现方式的基础上,还可以进行进一步组合以提供更多实现方式。
58、基于上述内容描述,可知本技术的技术方案具有如下有益效果:
59、具体地,该方法中的内镜操控台车包括四个麦克纳姆轮,该方法首先获取内镜操控台车的被控点的目标运动轨迹,接着根据目标运动轨迹,确定内镜操控台车的基准点在当前计算周期的速度参数,其中,速度参数包括基准点在第一方向上的速度、基准点在第二方向上的速度和基准点的角速度,然后根据四个麦克纳姆轮在上一计算周期的速度,确定辅助系数,根据辅助系数和内镜操控台车的基准点在当前计算周期的速度参数,确定四个麦克纳姆轮在当前计算周期的速度。
60、该方法针对内镜操控台车的移动过程,由于内镜操控台车包括四个麦克纳姆轮,而在确定内镜操控台车的目标运动轨迹后,仅能确定当前计算周期的三个不同的速度参数,无法计算得到四个麦克纳姆轮在当前计算周期的速度。因此,通过四个麦克纳姆轮在上一计算周期的速度确定出辅助系数,与三个不同的速度参数一同计算,能够得到麦克纳姆轮在当前计算周期的速度,从而确保内镜操控台车的平稳移动,实现内镜操控台车在手术室等狭窄区域的移动。
- 还没有人留言评论。精彩留言会获得点赞!