柔性上肢外骨骼康复训练系统
本发明涉及康复医疗设备,尤其涉及一种柔性上肢外骨骼康复训练系统。
背景技术:
1、
2、随着技术发展,上肢康复训练外骨骼得到飞速发展,基于仿生学和人体工程学设计的外骨骼机器人拥有末端牵引式康复机器人无法比拟的治疗效果与用户体验。上肢外骨骼辅助机器人可以模拟人体正常活动时上肢的运动规律,并且能承担一部分人体的重量,能够对上肢运动功能障碍的患者进行有效锻炼。
3、但现有的上肢康复训练外骨骼大多为一体结构无法分离,若其中上肢中某一处出现故障,就需要整个结构一起更换,造成不必要的浪费,大大增加了使用成本。
4、此外,随着变刚度关节的不断发展,其具备的刚度调节范围广、被动弹性储能容量大、任务适应能力强、控制带宽灵活性好、安全性高等优势逐渐凸显,更适合于要求兼顾安全性和控制精度的上肢康复训练外骨骼。
技术实现思路
1、本发明为解决上述问题,提供一种柔性上肢外骨骼康复训练系统,将上肢结构进一步细化为肩部、大臂、小臂以及各个关节,实现通用化、可拆卸,只需在不同部位的外骨骼支撑机构上安装相同结构的变刚度关节,即可使人机交互过程更加安全和自然。
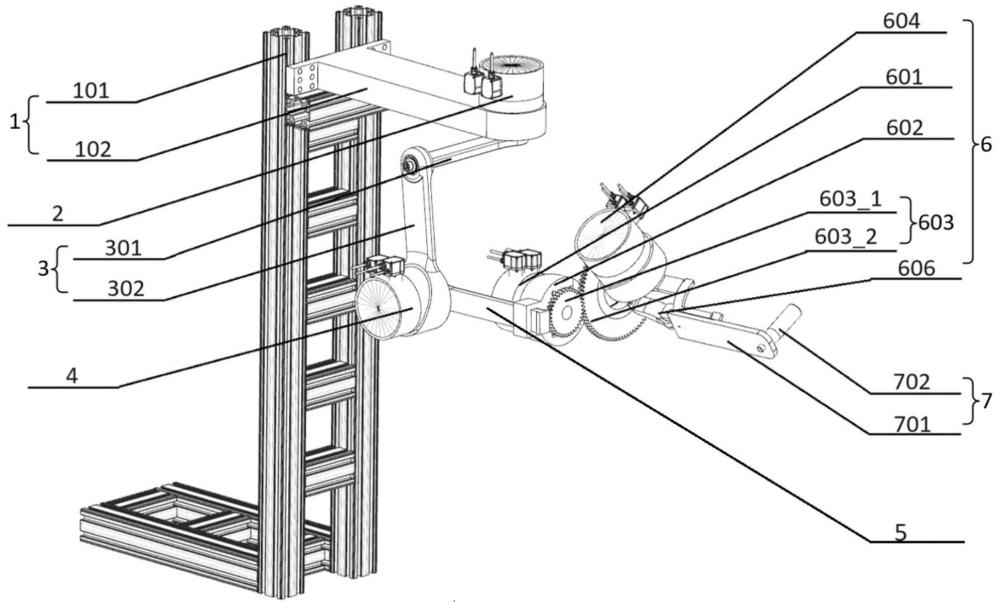
2、本发明提供的柔性上肢外骨骼康复训练系统包括支撑组件、转动关节、肩部柔性关节、肩部结构、大臂支撑板、肘部关节组件和小臂结构;其中,肘部关节组件将大臂支撑板和小臂结构可拆卸连接,用于模拟使用者的肘部活动;肩部柔性关节将大臂支撑板和肩部结构可拆卸连接,用于模拟使用者的肩部活动;转动关节将支撑组件与肩部结构可拆卸连接,用于模拟使用者的上肢进行水平转动;转动关节与肩部柔性关节均为变刚度关节。
3、进一步的,支撑组件包括支撑基底和承重升高架;其中,支撑基底为l形结构,承重升高架的一端根据使用者的上肢高度通过螺栓安装在支撑基底上;承重升高架的另一端开设有放置转动关节的转动关节安装槽,使转动关节放入转动关节安装槽中并与肩部结构相连。
4、进一步的,肩部结构包括横向肩部支撑板与纵向肩部支撑板;其中,横向肩部支撑板的一端与转动关节可拆卸连接;纵向肩部支撑板的一端开设有连接孔,使横向肩部支撑板的另一端通过轴承安装在连接孔中,纵向肩部支撑板的另一端设置有用于放置肩部柔性关节的肩部关节支撑架。
5、进一步的,肘部关节组件包括肘部旋转关节、肘部旋转连接件、肘部旋转齿轮组、肘部旋转架、肘部屈伸关节和肘部连接架;其中,肘部旋转关节和肘部屈伸关节均为与肩部柔性关节结构一致的变刚度关节;
6、肘部旋转连接件同轴套装在肘部旋转关节上,且在肘部旋转连接件的侧壁设有限位块,大臂支撑板的一端与肩部柔性关节可拆卸连接,大臂支撑板的另一端穿过限位块使肩部柔性关节与肘部旋转连接件相连,并限制大臂支撑板的长度;
7、肘部旋转齿轮组包括相啮合的小齿轮和大齿轮,小齿轮与肘部旋转关节可拆卸连接,大齿轮套设在肘部旋转架上设置的旋转滑槽的外圈,使肘部旋转关节通过肘部旋转齿轮组带动肘部旋转架进行轴向旋转;在肘部旋转架的一侧设置有用于放置肘部屈伸关节的肘部关节支撑架,以及相对于肘部关节支撑架的辅助支撑架;
8、肘部连接架为u形结构,肘部连接架的一侧与肘部屈伸关节和肘部关节支撑架可拆卸连接,肘部连接架的另一侧通过旋转轴与辅助支撑架相连,使肘部连接架在肘部屈伸关节与旋转轴的配合下以肘部屈伸关节为中心进行转动。
9、进一步的,小臂结构包括小臂支撑板和握把;其中,握把可拆卸安装在小臂支撑板的一端;小臂支撑板的另一端穿过肘部连接架,并设有限制小臂支撑板的移动位置的限位块。
10、进一步的,转动关节与肩部柔性关节为结构一致的变刚度关节;变刚度关节包括关节外壳、调刚机构、调刚电机、转动机构和转动电机;其中,调刚机构和转动机构同轴安装在关节外壳的内部,调刚电机和转动电机的输出轴伸入关节外壳中,并分别通过联轴器和蜗杆控制调刚机构和转动机构的转速,通过调节调刚机构和转动机构之间的转速比,当调刚机构和转动机构保持特定转速比时,调刚机构和转动机构保持相对静止的转动;当调刚机构和转动机构的转速比偏离特定转速比时,调刚机构配合转动机构进行转动刚度的调整。
11、进一步的,调刚机构包括中心轴、调刚涡轮、太阳轮、行星轮、保持架和滚轮滑块组;其中,调刚涡轮同轴固定在中心轴的一端,调刚电机的输出轴通过联轴器和蜗杆驱动调刚涡轮转动,进而带动中心轴转动;保持架通过轴承同轴套设在中心轴上,并沿保持架的周向均匀安装有不少于2个的行星轮,使行星轮与固定在中心轴上的太阳轮啮合;滚轮滑块组与转动机构和关节外壳接触;滚轮滑块组的数量与行星轮的数量一致并与行星轮齿纹啮合。
12、进一步的,滚轮滑块组包括滚轮、压块、齿条滑块、啮合滑块和滑轨;其中,滑轨安装在转动机构上,齿条滑块安装在滑轨上,在齿条滑块的一侧设有与行星轮啮合的边齿;啮合滑块位于齿条滑块的上方,在啮合滑块的底面和齿条滑块的顶面均匀布设有相吻合的倾斜滑槽,在啮合滑块的两侧开设有保持滑槽,使啮合滑块在关节外壳中设置的卡位和保持滑槽的配合下,将沿倾斜滑槽的运动分解为齿条滑块沿滑轨的平动和啮合滑块面向行星轮的平动;滚轮通过压块安装在啮合滑块上,使滚轮与转动机构接触。
13、进一步的,转动机构包括转动蜗轮、转动齿轮轴、传动齿轮、转动架、转动铰链和输出端;其中,滑轨固定在转动架上,传动齿轮与转动架同轴固接,转动架通过轴承套设在中心轴上,传动齿轮与套装转动蜗轮的转动齿轮轴相啮合,转动电机的输出轴经联轴器和蜗杆驱动转动蜗轮旋转,进而通过转动齿轮轴带动传动齿轮和转动架进行转动;转动铰链通过轴承同轴套设在中心轴上,并与滚轮接触;输出端通过轴承套设在中心轴上,且与转动铰链相连,用于向外部输出转动。
14、进一步的,在输出端的一侧设置有装配孔,与转动铰链的一侧表面设置的凸起块相配合,使凸起块插入装配孔中完成转动铰链与输出端的连接;在转动铰链的周向设置有柔性部分,柔性部分的组数与行星轮的数量相同,每一组柔性部分包括两个柔性片,滚轮伸入两个柔性片之间并与两个柔性片接触,通过改变两个柔性片对滚轮的支撑位置调整输出端向外输出的转动刚度。
15、进一步的,关节外壳包括输出连接盘、前端盖、电机前壳和电机后壳;其中,在电机前壳的内壁设置有与保持滑槽相对应的卡位,将调刚机构和转动机构放置在电机前壳和电机后壳连接后组成的内部空间中,调刚电机的输出轴和转动电机的输出轴伸入电机后壳后分别驱动调刚涡轮和转动蜗轮;前端盖安装在电机前壳上,输出连接盘同轴固接在输出端上;在输出连接盘的表面开设有不少于3个的连接槽,使横向肩部支撑板、大臂支撑板和肘部连接架分别可拆卸安装在输出连接盘上,使输出连接盘带动横向肩部支撑板、大臂支撑板和肘部连接架进行转动;小齿轮安装在输出连接盘上,使输出连接盘带动小齿轮进行轴向转动,进而通过大齿轮带动肘部旋转架进行轴向旋转。
16、与现有技术相比,本发明能够取得如下有益效果:
17、1)各部位驱动关节结构相同,灵活拆卸、维修方便,节约成本;
18、2)驱动关节为变刚度关节,在人机交互的康复训练中,可根据患者的身体状况和运动能力主动调节康复训练外骨骼的运动刚度,使人机交互过程更加安全和自然;
19、3)本发明提供的变刚度关节通过设计太阳轮、行星轮和滚轮滑块组的位置和结构,使用调刚电机和转动电机改变太阳轮和滚轮滑块组绕中心轴线的相对运动状态,进而改变行星轮的运动状态,在行星轮与滚轮滑块组的配合下完成后续的调刚工作,这一过程调刚电机和转动电机持续保持工作状态,提出的变刚度关节也始终保持输出旋转的工作状态,真正实现了边工作边调节刚度的技术效果,使得关节及与关节连接的外部设备运行更加平稳;
20、4)由于本发明提供的变刚度关节通过调刚电机和转动电机的转速比改变行星轮的运动状态,进而利用行星轮与滚轮滑块组的配合完成后续的调刚工作,因此较于传统的人工拆卸刚度调节方式和停止转动再调节刚度的方式,本发明提供的变刚度关节仅需调节调刚电机和转动电机的转速比即可实现刚度调节,无需过多的人工参与调节,有效提升了刚度调节的准确性和便捷性。
- 还没有人留言评论。精彩留言会获得点赞!