前拉动力遥控飞机的马达转接结构及前拉动力遥控飞机的制作方法
1.本实用新型涉及一种遥控飞机,特别涉及一种前拉动力遥控飞机的马达转接结构以及前拉动力遥控飞机。
背景技术:
2.目前,前拉动力遥控飞机的马达与机身之间的组装都是通过一块马达固定平板进行组装,需马达的偏角都是由固定座上的固定的角度来完成的,由于马达固定平板为一常规被固定在机身上的组件,而马达的固定角度(偏角)一旦确定,当需要改变马达的规格或拉力桨时,马达固定平板无法被拆下更换,导致无法改变马达的偏角,以达到反扭力与拉力线的平衡,使前拉动力遥控飞机的可改装性不大,降低了自行组装及动力改装的乐趣。
技术实现要素:
3.本实用新型的目的在于提供一种前拉动力遥控飞机的马达转接结构及前拉动力遥控飞机,要解决的技术问题是可根据拉力桨或马达规格实现方便更换转接座,满足主桨的反旋力平衡与重力的拉力线平衡的要求,提高前拉动力遥控飞机的可改装性。
4.为解决上述问题,本实用新型采用以下技术方案实现:一种前拉动力遥控飞机的马达转接结构,包括一与机体连接的固定座、可拆卸地固定在固定座上的转接座,转接座包括马达固定面,该马达固定面为至少朝一个方向倾斜的倾斜面;在马达固定面上对称设置有四个马达固定螺孔,以将马达固定在马达固定面上。
5.进一步地,马达固定面为朝一个方向倾斜的倾斜面。
6.进一步地,马达固定面为朝两个方向倾斜的倾斜面。
7.进一步地,转接座上对称设置有连接部,连接部上设有第一固定座螺孔,在固定座上设有与第一固定座螺孔相适配的第二固定座螺孔。
8.本实用新型还公开了一种前拉动力遥控飞机,包括机体以及固定在机体前端的马达,还包括所述的前拉动力遥控飞机的马达转接结构,在机体的前端设有装配孔,在装配孔的孔壁上设有卡槽,在固定座上设有与卡槽相适配的卡嵌部,以将固定座固定于装配孔中,马达与马达固定面相对设置,马达上具有连接座,连接座上设有与马达固定螺孔相适配的连接座螺孔,马达通过螺丝从转接座背离马达的一端表面与马达固定螺孔、连接座螺孔螺纹连接,将马达固定在马达固定面上。
9.进一步地,马达固定面为朝一个方向倾斜的倾斜面。
10.进一步地,马达固定面为朝两个方向倾斜的倾斜面。
11.进一步地,转接座上对称设置有连接部,连接部上设有第一固定座螺孔,在固定座上设有与第一固定座螺孔相适配的第二固定座螺孔,转接座通过螺丝从马达固定面的一端与第一固定座螺孔、第二固定座螺孔螺纹连接,将转接座固定在固定座上。
12.本实用新型与现有技术相比,通过在固定座上设置可拆卸的转接座,将转接座的马达固定面设置为至少朝一个方向倾斜的倾斜面,使得可根据拉力桨或马马达规格快速更
换不同夹角的转接座,以改变马达的偏角来达到主桨的反旋力平衡与重力的拉力线平衡,使飞机能更加平稳飞行,不仅提高了前拉动力遥控飞机的可改装性,还增加了改装的乐趣;而采用可拆卸的方式将转接座与固定座进行连接固定,从而便于转接座的更换。
附图说明
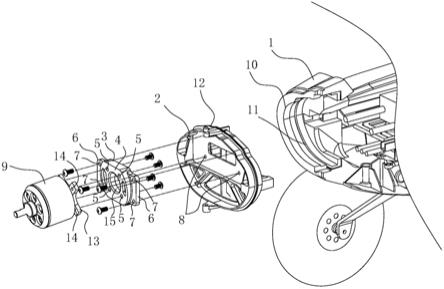
13.图1是本实用新型的分解示意图。
14.图2是本实用新型的局部放大图。
15.图3是本实用新型的转接座的主视图。
16.图4是图3的仰视图。
17.图5是图4的左视图。
具体实施方式
18.下面结合附图和实施例对本实用新型作进一步详细说明。
19.如图1、图2、图3、图4和图5所示,本实用新型公开了一种前拉动力遥控飞机的马达转接结构,包括一与机体1连接的固定座2、固定在固定座2上的转接座3,转接座3可拆卸地固定在固定座2上,转接座3包括马达固定面4,该马达固定面4为至少朝一个方向倾斜的倾斜面;在马达固定面4上对称设置有四个马达固定螺孔5,以将马达固定在马达固定面4上。
20.如图1、图2和图3所示,转接座3的马达固定面4中心设有一贯穿马达固定面4以及转接座3与固定座2相对的一端表面的中心贯穿孔15,马达固定螺孔5对称设置在中心贯穿孔15的四周上。
21.如图3和图4所示,马达固定面4的朝其边缘上的任意一点或任意一段的边缘方向倾斜,从而使马达固定面4和转接座3与固定座2相对的一端表面之间形成第一夹角a。
22.如图3、图4和图5所示,作为本实用新型的一种实施方式,马达固定面4 为朝一个方向倾斜的倾斜面,如将马达固定面4的四个边缘分别定义为c、d、 e、f,其中一边缘c、d、e或f朝其相对一端边缘倾斜,从而形成朝一个方向倾斜的倾斜面。
23.如图3、图4和图5所示,马达固定面4为朝同两个方向倾斜的倾斜面,如图3所示,将马达固定面4的四个边缘分别定义为c、d、e、f,其中相邻的两端边缘c和边缘d或者边缘e和边缘f均朝另一相邻的两端边缘之间的连接位置倾斜,形成两个方向上的倾斜,该两个方向相互垂直,从而在形成第一夹角a的基础上使马达固定面4和转接座3与固定座2相对的一端表面之间形成第二夹角b。更确切的说,该两个方向为图3中的x轴方向(水平)和y轴方向(垂直)。
24.如图1和图2所示,在转接座3上对称设置有连接部6,连接部6上设有第一固定座螺孔7,在固定座2上设有与第一固定座螺孔7相适配的第二固定座螺孔8,转接座3通过螺丝与第一固定座螺孔7、第二固定座螺孔8螺纹连接,实现将转接座3固定在固定座2上。
25.如图1和图2所示,本实用新型还公开了一种前拉动力遥控飞机,包括机体1以及固定在机体1前端的马达9,还包括上述的前拉动力遥控飞机的马达转接结构,在此不再赘述,在机体1的前端设有装配孔10,在装配孔10的孔壁上设有卡槽11,在固定座2上设有与卡槽11相适配的卡嵌部12,以将固定座2固定于装配孔10中,马达9与马达固定面4相对设置,马达9上具有连接座13,连接座13上设有与马达固定螺孔5相适配的连接座螺孔14,马达9通过
螺丝从转接座3背离马达9的一端表面与马达固定螺孔5、连接座螺孔14螺纹连接,将马达9固定在马达固定面4上。
26.如图1所示,转接座3通过螺丝从马达固定面4的一端与第一固定座螺孔 7、第二固定座螺孔8螺纹连接,将转接座3固定在固定座2上。
27.采用上述的连接方式,实现了根据马达的规格更换相应的转接座,由于采用螺丝连接的方式,从而使用户能够快速的对马达规格或拉力浆替换相应的转接座3,改变电机偏角,以保证主桨的反旋力平衡与重力的拉力线平衡,使飞机能更加平稳飞行,提高了前拉动力飞机的可改装性,增加了改装乐趣。
技术特征:
1.一种前拉动力遥控飞机的马达转接结构,其特征在于:包括一与机体连接的固定座(2)、可拆卸地固定在固定座(2)上的转接座(3),转接座(3)包括马达固定面(4),该马达固定面(4)为至少朝一个方向倾斜的倾斜面;在马达固定面(4)上对称设置有四个马达固定螺孔(5),以将马达固定在马达固定面(4)上。2.根据权利要求1所述的前拉动力遥控飞机的马达转接结构,其特征在于:马达固定面(4)为朝一个方向倾斜的倾斜面。3.根据权利要求1所述的前拉动力遥控飞机的马达转接结构,其特征在于:马达固定面(4)为朝两个方向倾斜的倾斜面。4.根据权利要求1
‑
3任意一项所述的前拉动力遥控飞机的马达转接结构,其特征在于:转接座(3)上对称设置有连接部(6),连接部(6)上设有第一固定座螺孔(7),在固定座(2)上设有与第一固定座螺孔(7)相适配的第二固定座螺孔(8)。5.一种前拉动力遥控飞机,包括机体(1)以及固定在机体(1)前端的马达(9),其特征在于:还包括如权利要求1所述的前拉动力遥控飞机的马达转接结构,在机体(1)的前端设有装配孔(10),在装配孔(10)的孔壁上设有卡槽(11),在固定座(2)上设有与卡槽(11)相适配的卡嵌部(12),以将固定座(2)固定于装配孔(10)中,马达(9)与马达固定面(4)相对设置,马达(9)上具有连接座(13),连接座(13)上设有与马达固定螺孔(5)相适配的连接座螺孔(14),马达(9)通过螺丝从转接座(3)背离马达(9)的一端表面与马达固定螺孔(5)、连接座螺孔(14)螺纹连接,将马达(9)固定在马达固定面(4)上。6.根据权利要求5所述的前拉动力遥控飞机,其特征在于:马达固定面(4)为朝一个方向倾斜的倾斜面。7.根据权利要求5所述的前拉动力遥控飞机,其特征在于:马达固定面(4)为朝两个方向倾斜的倾斜面。8.根据权利要求5
‑
7任意一项所述的前拉动力遥控飞机,其特征在于:转接座(3)上对称设置有连接部(6),连接部(6)上设有第一固定座螺孔(7),在固定座(2)上设有与第一固定座螺孔(7)相适配的第二固定座螺孔(8),转接座(3)通过螺丝从马达固定面(4)的一端与第一固定座螺孔(7)、第二固定座螺孔(8)螺纹连接,将转接座(3)固定在固定座(2)上。
技术总结
本实用新型公开了一种前拉动力遥控飞机的马达转接结构,包括一与机体连接的固定座、可拆卸地固定在固定座上的转接座,转接座包括马达固定面,该马达固定面为至少朝一个方向倾斜的倾斜面;在马达固定面上对称设置有四个马达固定螺孔,以将马达固定在马达固定面上。本实用新型还公开了一种前拉动力遥控飞机,包括所述的前拉动力遥控飞机的马达转接结构。与现有技术相比,可根据拉力桨或马马达规格快速更换不同夹角的转接座,以改变马达的偏角来达到主桨的反旋力平衡与重力的拉力线平衡,使飞机能更加平稳飞行,不仅提高了前拉动力遥控飞机的可改装性,还增加了改装的乐趣;而采用可拆卸的方式将转接座与固定座进行连接固定,从而便于转接座的更换。便于转接座的更换。便于转接座的更换。
技术研发人员:沈安平
受保护的技术使用者:深圳市沈氏彤创航天模型有限公司
技术研发日:2021.02.03
技术公布日:2021/11/24
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1