一体成型超可动人偶模型的制作方法
1.本实用新型涉及仿真人偶模型领域,特别是指一体成型超可动人偶模型。
背景技术:
2.目前,人偶模型通常由多个零件组装一体构成,零件与零件之间安装有可动关节零件,零件需要分次组装情况下,才能实现多个零件可动,人偶的组装较为复杂,且模具成本高,生产成本高。
技术实现要素:
3.本实用新型提供一种成型超可动人偶模型,以克服现有人偶模型存在需要各可动关节零件在分次组装的情况下实现多个零件可动、生产成本高的问题。
4.本实用新型采用如下技术方案:
5.一体成型超可动人偶模型,包括塑料制成的头部、躯干、手臂和腿部,上述躯干包括胸部、腹部和臀部,胸部可转动连接腹部上端,臀部可拆卸连接腹部下端,上述手臂包括上臂和前臂,上臂与前臂之间安装有肘部连接件,上述腿部包括大腿和小腿,大腿与小腿之间安装有膝部连接件,胸部和臀部均设有球头杆,上臂和大腿均设有与球头杆适配连接的半球形槽,胸部上可转动设置有颈部,上述头部拆卸套设于颈部上,颈部、腹部、肘部连接件和膝部连接件的塑料熔点高于其余零件的塑料熔点且互不相熔。
6.进一步改进地,上述胸部包括一个胸部主体和两个肩部,胸部主体的左右侧壁上设有卡槽,肩部设有与卡槽适配的插接部。
7.进一步改进地,上述前臂的末端安装有拳头。
8.进一步改进地,上述小腿的下端安装有足部。
9.由上述对本实用新型结构的描述可知,和现有技术相比,本实用新型具有如下优点:本实用新型的超可动人偶模型攻克“多次成型可动人偶模型”技术多次改进原创设计,应用多种材料注塑成型温度差,将可动人偶模型的关节零件以高温熔点塑料材料做为第一次成型基础,再以低熔点且两种材料不互熔的塑料材料进行第二次外观注塑成型使其二次注塑成型后,人偶模型的各可动关节零件在无需组装的情况下实现多个零件可动研发时更是加入设计师个人理念,多元应用此技术实现多个关节零件联动结构及排除模具行位生产成本。
附图说明
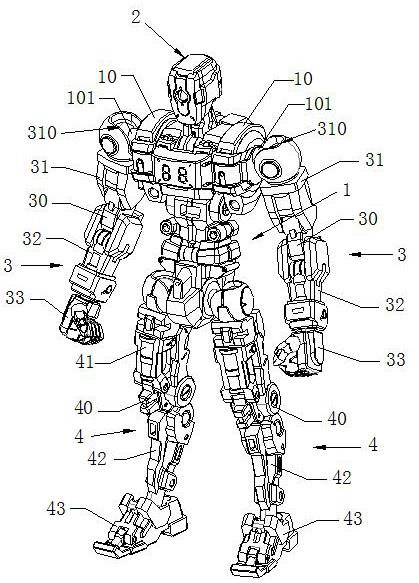
10.图1为本实用新型的超可动人偶模型的立体结构示意图。
11.图2为本实用新型的超可动人偶模型的分体结构示意图。
12.图3为本实用新型的躯干的分体结构示意图。
具体实施方式
13.下面参照附图说明本实用新型的具体实施方式。
14.参照图1至图3,一体成型超可动人偶模型,包括塑料制成的头部2、躯干1、手臂3和腿部4,上述躯干1包括胸部11、腹部12和臀部13,胸部11可转动连接腹部12上端,臀部13可拆卸连接腹部12下端,上述手臂3包括上臂31和前臂32,上臂31与前臂32之间安装有肘部连接件30,上述腿部4包括大腿41和小腿42,大腿41与小腿42之间安装有膝部连接件40,胸部11和臀部13均设有球头杆101,上臂31和大腿41均设有与球头杆101适配连接的半球形槽310,胸部11上可转动设置有颈部111,上述头部2拆卸套设于颈部111上,颈部111、腹部12、肘部连接件30和膝部连接件40的塑料熔点高于其余零件的塑料熔点且互不相熔。
15.参照图3,上述胸部11包括一个胸部主体和两个肩部10,胸部11主体的左右侧壁上设有卡槽112,肩部10设有与卡槽112适配的插接部102。
16.参照图1,上述前臂32的末端安装有拳头33,该拳头33与前臂32的末端套接。
17.参照图1,上述小腿42的下端安装有足部43,该足部43与小腿42的下端套接。
18.一体成型超可动人偶模型的制作工艺,包括以下步骤:
19.步骤s1,将高温熔点的塑料注塑成型人偶的颈部111、腹部12、肘部连接件30和膝部连接件40,作为第一次成型的基础零件;
20.步骤s2,将基础零件放入模具内,将低温熔点塑料注入模具内进行二次注塑成型人偶的头部2、上臂31、前臂32、大腿41、小腿42、头部2、胸部11和臀部13,上臂31、肘部连接件30和前臂32组成手臂3,大腿41、膝部连接件40和小腿42组成腿部4,胸部11、腹部12和臀部13组成躯干1;
21.步骤s3,将步骤2中二次注塑成型的躯干1、手臂3和腿部4组装成一体,再安装上头部2、拳头33和足部43。
22.本实用新型的超可动人偶模型攻克“多次成型可动人偶模型”技术多次改进原创设计,应用多种材料注塑成型温度差,将可动人偶模型的关节零件以高温熔点塑料材料做为第一次成型基础,再以低熔点且两种材料不互熔的塑料材料进行第二次外观注塑成型使其二次注塑成型后,人偶模型的各可动关节零件在无需组装的情况下实现多个零件可动研发时更是加入设计师个人理念,多元应用此技术实现多个关节零件联动结构及排除模具行位生产成本。
23.上述仅为本实用新型的具体实施方式,但本实用新型的设计构思并不局限于此,凡利用此构思对本实用新型进行非实质性的改动,均应属于侵犯本实用新型保护范围的行为。
技术特征:
1.一体成型超可动人偶模型,包括塑料制成的头部、躯干、手臂和腿部,其特征在于:所述躯干包括胸部、腹部和臀部,胸部可转动连接腹部上端,臀部可拆卸连接腹部下端,所述手臂包括上臂和前臂,上臂与前臂之间安装有肘部连接件,所述腿部包括大腿和小腿,大腿与小腿之间安装有膝部连接件,胸部和臀部均设有球头杆,上臂和大腿均设有与球头杆适配连接的半球形槽,胸部上可转动设置有颈部,所述头部拆卸套设于颈部上,颈部、腹部、肘部连接件和膝部连接件的塑料熔点高于其余零件的塑料熔点且互不相熔。2.如权利要求1所述的一体成型超可动人偶模型,其特征在于:所述胸部包括一个胸部主体和两个肩部,胸部主体的左右侧壁上设有卡槽,肩部设有与卡槽适配的插接部。3.如权利要求1所述的一体成型超可动人偶模型,其特征在于:所述前臂的末端安装有拳头。4.如权利要求1所述的一体成型超可动人偶模型,其特征在于:所述小腿的下端安装有足部。
技术总结
本实用新型涉及一体成型超可动人偶模型,包括塑料制成的头部、躯干、手臂和腿部,躯干包括胸部、腹部和臀部,上述手臂包括上臂和前臂,腿部包括大腿和小腿,大腿与小腿之间安装有膝部连接件,头部拆卸套设于颈部上,颈部、腹部、肘部连接件和膝部连接件的塑料熔点高于其余零件的塑料熔点且互不相熔。本实用新型的超可动人偶模型的各可动关节零件在无需组装的情况下实现多个零件可动研发时更是加入设计师个人理念,多元应用此技术实现多个关节零件联动结构及排除模具行位生产成本。动结构及排除模具行位生产成本。动结构及排除模具行位生产成本。
技术研发人员:吴炳华
受保护的技术使用者:吴炳华
技术研发日:2021.12.23
技术公布日:2022/5/17
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1