一种基于气动驱动的柔性可变形磁吸模块
本申请涉及玩具制造应用领域,具体涉及一种基于气动驱动的柔性可变形磁吸模块。
背景技术:
1、气动驱动的柔性变形最先在柔性机器人领域得到研究与应用。柔性材料具有天生的材料优势,具有柔软的触感,引发人们温暖亲切的情感。气密性良好的柔性材料例如可塑性塑料、弹性体等在充气后可以发生变形,通过对材料变形方式的研究,可以得到形状变化、纹理变化、机械动作等多种多样的变形。这样的变形能力允许在不直接嵌入电子元件的情况下,引发人与产品或界面之间的交互。
2、在传统的积木模块的设计中,根据玩法可以将其分类为能动式积木、拼插式积木、组装式积木、堆积式积木。能动式积木含有驱动装置,可以实现积木运动。积木运动的常见方式为机械运动,通过齿轮、电机、传送带等进行运作。拼插式积木的材质多为塑料,在市场上常见的有雪花片积木、磁力片积木、凹凸管积木、塑料颗粒积木等。
3、现有积木模块的材料以硬材质为主,虽然硬塑料、木制材料的生产与制作工艺成熟,但是相较于柔性材料而言不具备亲和力。与此同时,通过齿轮、电机、传送带等机械零件引发的驱动,不适合年龄较小的儿童,容易产生误吞等安全性问题。
技术实现思路
1、针对现有积木模块运动驱动方式过于机械化、不适合低龄儿童、安全性无法保障的问题,本发明实施例提供一种基于气动驱动的柔性可变形磁吸模块。
2、根据本申请实施例,提供一种基于气动驱动的柔性可变形磁吸模块,包括:
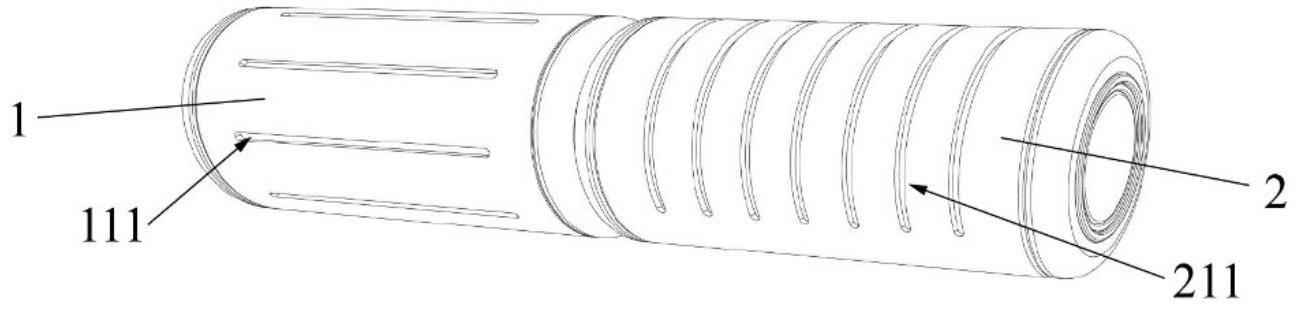
3、至少一个连接模块,所述连接模块包括第一硅胶外壳、一对第一通气转接头和第一气囊,所述第一硅胶外壳上开有第一功能槽,所述第一气囊设置在所述第一硅胶外壳中,一对所述第一通气转接头堵在所述第一硅胶外壳的两端,一对所述第一通气转接头均与所述第一气囊相连通;
4、至少一个变形模块,所述连接模块包括第二硅胶外壳、第二通气转接头、封闭转接头和第二气囊,所述第二硅胶外壳上开有第二功能槽,所述第二气囊设置在所述第二硅胶外壳中,所述第二通气转接头和封闭转接头分别堵在所述第二硅胶外壳的两端,所述第二通气转接头与所述第二气囊相连通;
5、相连的两个连接模块的第一通气转接头之间、连接模块的第一通气转接头和变形模块的第二通气转接头之间通过磁吸方式吸合后相连通。
6、进一步地,所述第一功能槽为在所述第一硅胶外壳上开设预定形状的若干贯通的裂缝,在所述第一气囊充气膨胀的作用下,以使得所述第一硅胶外壳产生收缩/伸长或弯曲或旋转的动作变化。
7、进一步地,所述第一通气转接头包括:
8、第一帽塞,所述第一帽塞中心开有第一贯通孔,所述第一贯通孔与所述第一气囊相连通;
9、第一磁铁,所述第一磁铁嵌在所述第一帽塞外端,所述第一磁铁上开有第一孔洞,所述第一孔洞与所述第一贯通孔相连通;及
10、第一密封圈,所述第一密封圈固定在所述第一帽塞外端面上。
11、进一步地,第二功能槽为在所述第二硅胶外壳上开设预定形状的若干贯通的裂缝,在所述第二气囊充气膨胀的作用下,以使得所述第二硅胶外壳产生卷曲、几何变形或z字变形的形状变化。
12、进一步地,所述第二通气转接头包括:
13、第二帽塞,所述第二帽塞中心开有第二贯通孔,所述第二贯通孔与所述第二气囊相连通;
14、第二磁铁,所述第二磁铁嵌在所述第二帽塞外端,所述第二磁铁上开有第二孔洞,所述第二孔洞与所述第二贯通孔相连通;及
15、第二密封圈,所述第二密封圈固定在所述第二帽塞外端面上。
16、进一步地,所述封闭转接头包括:
17、第三帽塞;
18、第三磁铁,所述第三磁铁嵌在所述第三帽塞外端。
19、进一步地,所述第一帽塞、第二帽塞和第三帽塞的材质为硬度邵氏a95的硅胶材料,其作用在于连接其他结构。
20、进一步地,所述第一磁铁、第二磁铁和第三磁铁的材质为钕铁硼磁铁,中心带孔,允许气体通过。
21、进一步地,所述第一密封圈、第二密封圈和第三密封圈的材质为硬度邵氏a30的硅胶材料,其作用在于保障相连两个模块之间的连接气密性;
22、所述第一硅胶外壳和第二硅胶外壳的材质为硬度邵氏a95的硅胶材料;
23、所述第一气囊和第二气囊的材质为乳胶,在充气后发生膨胀。
24、进一步地,通过设计若干所述裂缝的长度、间距、斜度、排列方式,来产生不同的变形效果。
25、由上述实施例可知,本申请采用磁吸的方式对连接模块与变形模块之间进行连接,克服了模块之间气密性不足的问题,结构合理,具有拓展性,可以创造立体空间上的构建与变形。同时,本发明通过对柔性材料的可变形效果的探索与设计,以充气的方式驱动模块以及模块之间的变形,拓展了积木模块的运动方式,能够实现有别于机械运动的柔性的、亲和的运动。
26、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:
1.一种基于气动驱动的柔性可变形磁吸模块,其特征在于,包括:
2.根据权利要求1所述的一种基于气动驱动的柔性可变形磁吸模块,其特征在于,所述第一功能槽为在所述第一硅胶外壳上开设预定形状的若干贯通的裂缝,在所述第一气囊充气膨胀的作用下,以使得所述第一硅胶外壳产生收缩/伸长或弯曲或旋转的动作变化。
3.根据权利要求1所述的一种基于气动驱动的柔性可变形磁吸模块,其特征在于,所述第一通气转接头包括:
4.根据权利要求1所述的一种基于气动驱动的柔性可变形磁吸模块,其特征在于,第二功能槽为在所述第二硅胶外壳上开设预定形状的若干贯通的裂缝,在所述第二气囊充气膨胀的作用下,以使得所述第二硅胶外壳产生卷曲、几何变形或z字变形的形状变化。
5.根据权利要求1所述的一种基于气动驱动的柔性可变形磁吸模块,其特征在于,所述第二通气转接头包括:
6.根据权利要求1所述的一种基于气动驱动的柔性可变形磁吸模块,其特征在于,所述封闭转接头包括:
7.根据权利要求3、5或6所述的一种基于气动驱动的柔性可变形磁吸模块,其特征在于,所述第一帽塞、第二帽塞和第三帽塞的材质为硬度邵氏a95的硅胶材料,其作用在于连接其他结构。
8.根据权利要求3、5或6所述的一种基于气动驱动的柔性可变形磁吸模块,其特征在于,所述第一磁铁、第二磁铁和第三磁铁的材质为钕铁硼磁铁,中心带孔,允许气体通过。
9.根据权利要求3、5或6所述的一种基于气动驱动的柔性可变形磁吸模块,其特征在于,所述第一密封圈、第二密封圈和第三密封圈的材质为硬度邵氏a30的硅胶材料,其作用在于保障相连两个模块之间的连接气密性;
10.根据权利要求2或4所述的一种基于气动驱动的柔性可变形磁吸模块,其特征在于,通过设计若干所述裂缝的长度、间距、斜度、排列方式,来产生不同的变形效果。
技术总结
本发明公开了一种基于气动驱动的柔性可变形磁吸模块,包括:至少一个连接模块,包括第一硅胶外壳、一对第一通气转接头和第一气囊,第一硅胶外壳上开有第一功能槽,第一气囊设置在第一硅胶外壳中,一对第一通气转接头堵在第一硅胶外壳的两端,一对第一通气转接头均与第一气囊相连通;至少一个变形模块,包括第二硅胶外壳、第二通气转接头、封闭转接头和第二气囊,第二硅胶外壳上开有第二功能槽,第二气囊设置在第二硅胶外壳中,第二通气转接头和封闭转接头分别堵在第二硅胶外壳的两端,第二通气转接头与第二气囊相连通;转接头之间通过磁吸方式吸合。既拓展了材料的属性,又丰富了玩法,同时具有安全性和互动性。
技术研发人员:赵晓亮,陈佳,韩继文,张微,冯天
受保护的技术使用者:浙江大学
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!