一种多级调节自动手臂综合训练支架的制作方法
本发明涉及健身器材,具体为一种多级调节自动手臂综合训练支架。
背景技术:
1、随着人们生活节奏的加快,越来越多人进入亚健康状态,人们已经意识到持续健身的重要性,在人们进行各种训练项目时,手臂训练是人们经常锻炼的方式之一。
2、目前,现有的训练支架通过内部的拉线提供使用者所需训练阻力,传统健身训练支架通常为固定式,即仅提供一种固定的训练支点和活动自由度,用于完成某种特定的训练动作,所以使用者往往需要多台不同设备,才能完成一组训练。这些训练架占用了非常多的场地,且效率低下;鉴于此,我们提出一种多级调节自动手臂综合训练支架。
技术实现思路
1、本发明的主要目的是提供一种多级调节自动手臂综合训练支架,能够解决上述背景技术中所提出的问题。
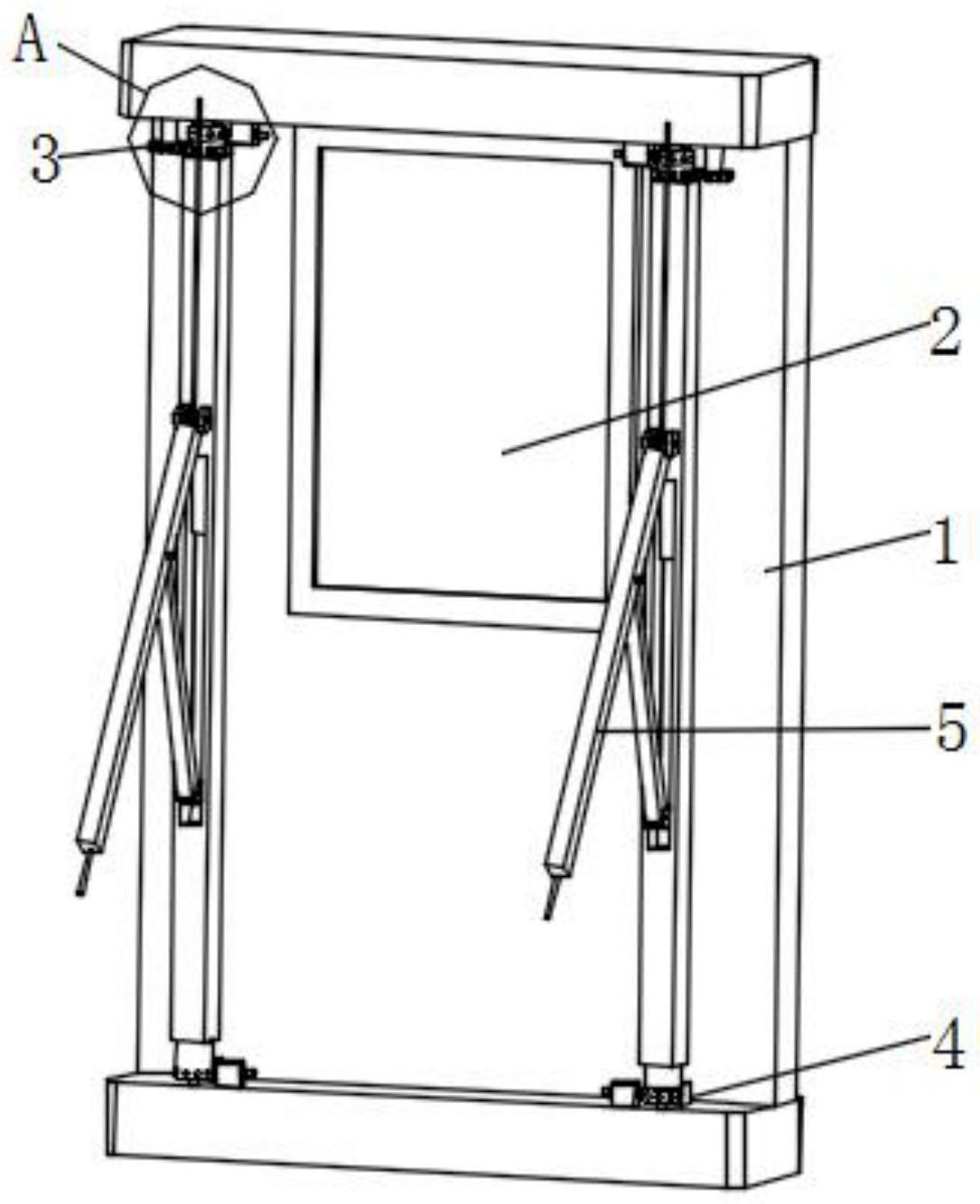
2、为实现上述目的,本发明提出的多级调节自动手臂综合训练支架,包括训练支架,所述训练支架的外壁上固定连接有智能屏,所述智能屏的两侧设置有转动限位组件,所述训练支架的底部固定连接有角度感应器,所述转动限位组件的下方设置有训练装置,所述训练装置包括:
3、固定架,所述固定架固定连接在转动限位组件的下侧;
4、支座,所述支座固定连接在固定架的外壁上;
5、铰接轴,所述铰接轴贯穿支座且与支座转动连接;
6、及辅助组件,所述辅助组件被铰接轴贯穿。
7、优选的,所述支座铰接有训练臂,所述固定架的外壁上开设有凹槽,所述凹槽中镶嵌安装有电动伸缩杆。
8、优选的,所述电动伸缩杆的输出端上固定连接有滑动块,所述滑动块铰接有支撑杆,所述支撑杆远离滑动块的一端铰接在训练臂上。
9、优选的,所述训练臂被拉线贯穿且与拉线滑动连接。
10、优选的,所述辅助组件包括滑轮,所述滑轮被铰接轴贯穿且与铰接轴固定连接,所述滑轮的内壁上开设有内槽,所述内槽中滑动连接有垫板。
11、优选的,所述垫板与内槽通过压紧弹簧弹性连接,所述垫板远离压紧弹簧的一侧固定连接有限位件,所述限位件的下侧镶嵌安装有转辊,拉线能够与滑轮表面接触的过程中,拉线能够挤压限位件,使限位件挤压压紧弹簧,在拉线与滑轮内壁接触后,在压紧弹簧的复位作用下,带动限位件复位,使转辊对拉线进行压紧,同时拉线在滑动的过程中,转辊能够进行转动,不会影响拉线的滑动。
12、优选的,所述转动限位组件包括转轴,所述转轴的下端固定连接有主动齿轮,所述训练支架的内表面转动连接有转环。
13、优选的,所述转环远离训练支架的一侧固定连接有齿轮块,且齿轮块与主动齿轮啮合,所述齿轮块与固定架固定连接,所述训练支架的外壁上固定连接有电磁限位块。
14、优选的,所述转环的外壁上开设有多组限位孔,且多组限位孔圆周阵列设置在转环的外壁上。
15、有益效果
16、本发明提供了一种多级调节自动手臂综合训练支架。具备以下有益效果:
17、(1)、该多级调节自动手臂综合训练支架通过转动限位组件与训练装置的使用,使训练臂能够进行多角度的立体调节,通过一个可自动控制的活动手臂结构,提供了上下摆动及左右转动两个自由度,实现了空间内多个弧线面组合范围内阻力支点的自由自动化设置,实现了综合训练架的自动化,可以完成大部分训练动作,极大减少所需要的固定设备,提高了设备和场地的使用效率。
18、(2)、该多级调节自动手臂综合训练支架通过转动限位组件与角度感应器的使用,使该装置在进行调节之后,通过电磁限位块断电能够将电磁限位块中的插销自动插入到转环的限位孔中,进而实现对固定架转动后的固定,同时角度感应器能够对固定架转动后的角度进行监测,便于智能屏的显示记录,可以实现训练阻力支点位置的自动化控制,使用者只需要通过触控屏幕或者其他交互界面上对位置进行设置,便于使用者的使用。
19、(3)、该多级调节自动手臂综合训练支架通过辅助组件的使用,使拉线在与滑轮内壁接触的过程中能够挤压限位件,使限位件挤压压紧弹簧,在拉线与滑轮内壁接触后,在压紧弹簧的复位作用下,带动限位件复位,使转辊对拉线进行压紧,同时拉线在滑动的过程中,转辊能够进行转动,不会影响拉线的滑动,达到对拉线稳定限位的效果,有效防止拉线的脱落,保证其正常使用。
技术特征:
1.一种多级调节自动手臂综合训练支架,包括训练支架(1),其特征在于:所述训练支架(1)的外壁上固定连接有智能屏(2),所述智能屏(2)的两侧设置有转动限位组件(3),所述训练支架(1)的底部固定连接有角度感应器(4),所述转动限位组件(3)的下方设置有训练装置(5),所述训练装置(5)包括:
2.根据权利要求1所述的一种多级调节自动手臂综合训练支架,其特征在于:所述支座(52)铰接有训练臂(54),所述固定架(51)的外壁上开设有凹槽(56),所述凹槽(56)中镶嵌安装有电动伸缩杆(57)。
3.根据权利要求2所述的一种多级调节自动手臂综合训练支架,其特征在于:所述电动伸缩杆(57)的输出端上固定连接有滑动块(58),所述滑动块(58)铰接有支撑杆(59),所述支撑杆(59)远离滑动块(58)的一端铰接在训练臂(54)上。
4.根据权利要求2所述的一种多级调节自动手臂综合训练支架,其特征在于:所述训练臂(54)被拉线(510)贯穿且与拉线(510)滑动连接。
5.根据权利要求1所述的一种多级调节自动手臂综合训练支架,其特征在于:所述辅助组件(55)包括滑轮(551),所述滑轮(551)被铰接轴(53)贯穿且与铰接轴(53)固定连接,所述滑轮(551)的内壁上开设有内槽(552),所述内槽(552)中滑动连接有垫板(553)。
6.根据权利要求5所述的一种多级调节自动手臂综合训练支架,其特征在于:所述垫板(553)与内槽(552)通过压紧弹簧(555)弹性连接,所述垫板(553)远离压紧弹簧(555)的一侧固定连接有限位件(554),所述限位件(554)的下侧镶嵌安装有转辊(556)。
7.根据权利要求1所述的一种多级调节自动手臂综合训练支架,其特征在于:所述转动限位组件(3)包括转轴(31),所述转轴(31)的下端固定连接有主动齿轮(32),所述训练支架(1)的内表面转动连接有转环(33)。
8.根据权利要求7所述的一种多级调节自动手臂综合训练支架,其特征在于:所述转环(33)远离训练支架(1)的一侧固定连接有齿轮块(34),且齿轮块(34)与主动齿轮(32)啮合,所述齿轮块(34)与固定架(51)固定连接,所述训练支架(1)的外壁上固定连接有电磁限位块(35)。
9.根据权利要求8所述的一种多级调节自动手臂综合训练支架,其特征在于:所述转环(33)的外壁上开设有多组限位孔(331),且多组限位孔(331)圆周阵列设置在转环(33)的外壁上。
技术总结
本发明公开了一种多级调节自动手臂综合训练支架,包括训练支架,所述训练支架的外壁上固定连接有智能屏,所述智能屏的两侧设置有转动限位组件,所述训练支架的底部固定连接有角度感应器,所述转动限位组件的下方设置有训练装置,所述训练装置包括固定架。该多级调节自动手臂综合训练支架通过转动限位组件与训练装置的使用,使训练臂能够进行多角度的立体调节,通过一个可自动控制的活动手臂结构,提供了上下摆动及左右转动两个自由度,实现了空间内多个弧线面组合范围内阻力支点的自由自动化设置,实现了综合训练架的自动化,可以完成大部分训练动作,极大减少所需要的固定设备,提高了设备和场地的使用效率。
技术研发人员:徐一凡,刘伟,应俊
受保护的技术使用者:上海赛玥科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!