智能乒乓球训练器的制作方法
本技术属于乒乓球训练装置领域,具体涉及一种智能乒乓球训练器。
背景技术:
1、乒乓球陪练机器人和智能发球机器人作为人工智能在体育领域中的应用,其智能程度直接影响着用户体验。然而,乒乓球陪练机器人和智能发球机器人使用时对球桌和场地有要求,需要球桌和较大的场地。
2、本实用新型发明人在研发过程中发现,现有的可任意放置的小型乒乓球回弹训练器中没有智能控制,只是单纯的击打弹性机构上的乒乓球,不能控制频率,不能检测数量和击打力度,不能进行多机联动,不能实现多种球的套路训练等。
技术实现思路
1、为至少在一定程度上克服相关技术中存在的问题,本实用新型提供了一种智能乒乓球训练器。
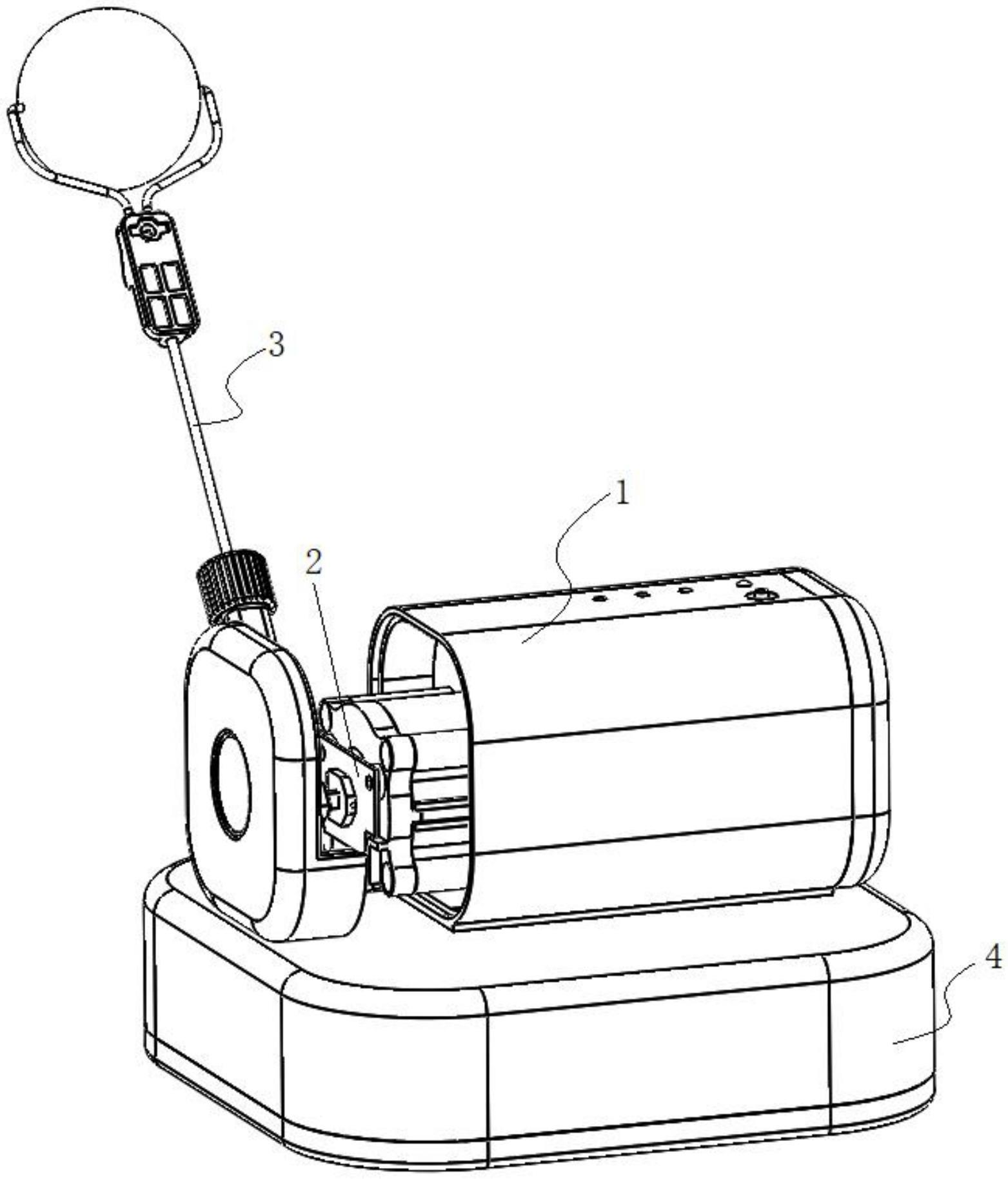
2、根据本实用新型实施例,本实用新型提供了一种智能乒乓球训练器,其包括训练器主机、角度传感器和乒乓球杆组件;所述训练器主机通过所述角度传感器与所述乒乓球杆组件连接,所述训练器主机用于控制所述乒乓球杆组件在预设角度范围内来回旋转,所述角度传感器用于检测击打的角速度并发送给所述训练器主机,所述训练器主机根据击打的角速度计算得到击打力度和击打次数。
3、上述智能乒乓球训练器中,所述训练器主机包括第一壳体以及设置在所述第一壳体中的控制板、电机、主动轮、压簧滚珠模组、从动轮和机构盖;
4、所述控制板与电机连接,所述电机的输出轴通过第一轴承与所述主动轮的一端连接,所述主动轮的另一端通过第二轴承与所述从动轮的一端连接;所述主动轮与从动轮连接一端的端面上嵌设有所述压簧滚珠模组;所述从动轮的另一端通过第三轴承与所述机构盖连接。
5、进一步地,所述训练器主机还包括从动轮轴和摆动杆,所述从动轮轴的一端穿过所述机构盖后插入所述从动轮中,另一端连接有所述摆动杆,所述摆动杆用于连接所述乒乓球杆组件;所述角度传感器穿设在所述从动轮轴上,且与所述机构盖远离所述从动轮的一侧面固定连接。
6、更进一步地,所述第一壳体包括左壳体、筒体、第一右壳体和第二右壳体;所述左壳体和第一右壳体分别对应设置在所述筒体的左右两侧,所述第二右壳体设置在所述第一右壳体的右侧;所述控制板和电机设置在所述筒体中,所述主动轮、压簧滚珠模组、从动轮以及机构盖设置在所述筒体与第一右壳体构成的空间中,所述摆动杆设置在所述第一右壳体与第二右壳体构成的空间中,所述摆动杆通过第四轴承与所述第二右壳体连接。
7、更进一步地,所述压簧滚珠模组包括外壳、压簧和滚珠;所述外壳采用一端封闭,另一端开口的壳体结构,所述压簧沿所述电机的输出轴与主动轮连接的方向设置在所述外壳中,所述压簧的一端与所述外壳的封闭一端的内壁连接,其另一端与所述滚珠连接,所述滚珠在所述压簧的作用下能够从所述外壳的开口的一端伸出。
8、更进一步地,所述从动轮靠近所述主动轮的侧面上设置有凸棱,所述凸棱用于击打力度未达到临界值时阻挡所述压簧滚珠模组中的滚珠,以实现所述主动轮对所述从动轮的驱动。
9、更进一步地,所述乒乓球杆组件包括连杆轴、碳纤杆、固定螺帽、钢丝座、钢丝和乒乓球;所述连杆轴用于连接所述摆动杆,所述碳纤杆的一端通过所述固定螺帽与所述连杆轴固定连接;所述碳纤杆的另一端连接有所述钢丝座,所述钢丝座上设置有所述钢丝,所述钢丝上固定设置有所述乒乓球。
10、更进一步地,所述智能乒乓球训练器还包括配重组件,所述配重组件设置在所述训练器主机的底部;所述配重组件包括配重块和第二壳体,所述配重块设置在所述第二壳体中;所述第二壳体与筒体固定连接。
11、根据本实用新型的上述具体实施方式可知,至少具有以下有益效果:本实用新型提供的智能乒乓球训练器包括训练器主机、角度传感器和乒乓球杆组件;训练器主机通过角度传感器与乒乓球杆组件连接,训练器主机用于控制乒乓球杆组件在预设角度范围内来回旋转,角度传感器用于检测击打的角速度并发送给训练器主机,训练器主机根据击打的角速度计算得到击打力度和击打次数。
12、本实用新型提供的智能乒乓球训练器通过在训练器主机中设置控制板、电机、主动轮、压簧滚珠模组、从动轮和机构盖,机构盖将主动轮和从动轮串接在电机的输出轴上,使得主动轮和从动轮不会出现轴向串动的问题。压簧滚珠模组中的滚珠与从动轮中的凸棱配合使用,通过凸棱阻挡滚珠,使得主动轮能够驱动从动轮;当乒乓球杆组件受到击打之后,击打力度达到临界值时,压簧滚珠模组中的滚珠轴向外壳内压缩,使得从动轮中的凸棱摆脱压簧滚珠模组中滚珠的阻挡,实现自由击打的状态,避免击打乒乓球时的阻尼感。
13、应了解的是,上述一般描述及以下具体实施方式仅为示例性及阐释性的,其并不能限制本实用新型所欲主张的范围。
技术特征:
1.一种智能乒乓球训练器,其特征在于,包括训练器主机、角度传感器和乒乓球杆组件;所述训练器主机通过所述角度传感器与所述乒乓球杆组件连接,所述训练器主机用于控制所述乒乓球杆组件在预设角度范围内来回旋转,所述角度传感器用于检测击打的角速度并发送给所述训练器主机,所述训练器主机根据击打的角速度计算得到击打力度和击打次数。
2.根据权利要求1所述的智能乒乓球训练器,其特征在于,所述训练器主机包括第一壳体以及设置在所述第一壳体中的控制板、电机、主动轮、压簧滚珠模组、从动轮和机构盖;
3.根据权利要求2所述的智能乒乓球训练器,其特征在于,所述训练器主机还包括从动轮轴和摆动杆,所述从动轮轴的一端穿过所述机构盖后插入所述从动轮中,另一端连接有所述摆动杆,所述摆动杆用于连接所述乒乓球杆组件;所述角度传感器穿设在所述从动轮轴上,且与所述机构盖远离所述从动轮的一侧面固定连接。
4.根据权利要求3所述的智能乒乓球训练器,其特征在于,所述第一壳体包括左壳体、筒体、第一右壳体和第二右壳体;所述左壳体和第一右壳体分别对应设置在所述筒体的左右两侧,所述第二右壳体设置在所述第一右壳体的右侧;所述控制板和电机设置在所述筒体中,所述主动轮、压簧滚珠模组、从动轮以及机构盖设置在所述筒体与第一右壳体构成的空间中,所述摆动杆设置在所述第一右壳体与第二右壳体构成的空间中,所述摆动杆通过第四轴承与所述第二右壳体连接。
5.根据权利要求2所述的智能乒乓球训练器,其特征在于,所述压簧滚珠模组包括外壳、压簧和滚珠;所述外壳采用一端封闭,另一端开口的壳体结构,所述压簧沿所述电机的输出轴与主动轮连接的方向设置在所述外壳中,所述压簧的一端与所述外壳的封闭一端的内壁连接,其另一端与所述滚珠连接,所述滚珠在所述压簧的作用下能够从所述外壳的开口的一端伸出。
6.根据权利要求5所述的智能乒乓球训练器,其特征在于,所述从动轮靠近所述主动轮的侧面上设置有凸棱,所述凸棱用于击打力度未达到临界值时阻挡所述压簧滚珠模组中的滚珠,以实现所述主动轮对所述从动轮的驱动。
7.根据权利要求3所述的智能乒乓球训练器,其特征在于,所述乒乓球杆组件包括连杆轴、碳纤杆、固定螺帽、钢丝座、钢丝和乒乓球;所述连杆轴用于连接所述摆动杆,所述碳纤杆的一端通过所述固定螺帽与所述连杆轴固定连接;所述碳纤杆的另一端连接有所述钢丝座,所述钢丝座上设置有所述钢丝,所述钢丝上固定设置有所述乒乓球。
8.根据权利要求4所述的智能乒乓球训练器,其特征在于,还包括配重组件,所述配重组件设置在所述训练器主机的底部;所述配重组件包括配重块和第二壳体,所述配重块设置在所述第二壳体中;所述第二壳体与筒体固定连接。
技术总结
本技术提供了一种智能乒乓球训练器,其包括训练器主机、角度传感器和乒乓球杆组件;所述训练器主机通过所述角度传感器与所述乒乓球杆组件连接,所述训练器主机用于控制所述乒乓球杆组件在预设角度范围内来回旋转,所述角度传感器用于检测击打的角速度并发送给所述训练器主机,所述训练器主机根据击打的角速度计算得到击打力度和击打次数。本技术提供的智能乒乓球训练器通过压簧滚珠模组中的滚珠与从动轮中的凸棱配合使用,能够实现自由击打的状态,避免击打乒乓球时的阻尼感。
技术研发人员:张海波,曹勇洋,张文
受保护的技术使用者:上海创屹科技有限公司
技术研发日:20221130
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!