一种驱动结构及移动机器人
本技术涉及机器人,具体而言,涉及一种驱动结构及移动机器人。
背景技术:
1、目前,篮球这项体育运动受同伴影响较大且运动强度大,所以对陪练者要求较高,既需要他们有一定的篮球技术,又需要他们具有良好的体能,以便可以持续喂球,这些都使得篮球锻炼的成本提高,由此可见陪练人员的技术状况,送球质量的优劣、难易程度等因素都制约着篮球运动的练习,特别是影响练习者的积极性。
2、如cn206306141u公开了篮球机器人抓球机构,包括三爪抓球机械爪、机械臂、托板、伸缩结构,三爪抓球机械爪与机械臂连接,机械臂的底端设有托板,伸缩结构设置在机械臂和托板之间,且伸缩结构一端与机械臂通过转轴连接,另一端与托板固定连接;伸缩结构包括位于机械臂左右两侧的手臂控制伸缩气缸、与手臂控制伸缩气缸连接的手臂控制伸缩杆,手臂控制伸缩气缸固定在托板上,手臂控制伸缩杆通过转轴与机械臂连接,三爪抓球机械爪包括呈三角形分布的三个机械爪、设置在机械臂端部的手爪控制伸缩杆。然而,该篮球机器人抓球机构仅仅只能实现抓球,并无法实现射球功能和进球功能。因此,传统的篮球机器人抓球机构已经无法满足用户的需求。
技术实现思路
1、基于此,为了解决传统的篮球机器人抓球机构仅仅只能实现抓球,并无法实现射球功能和进球功能的问题,本实用新型提供了一种驱动结构及移动机器人,其具体技术方案如下:
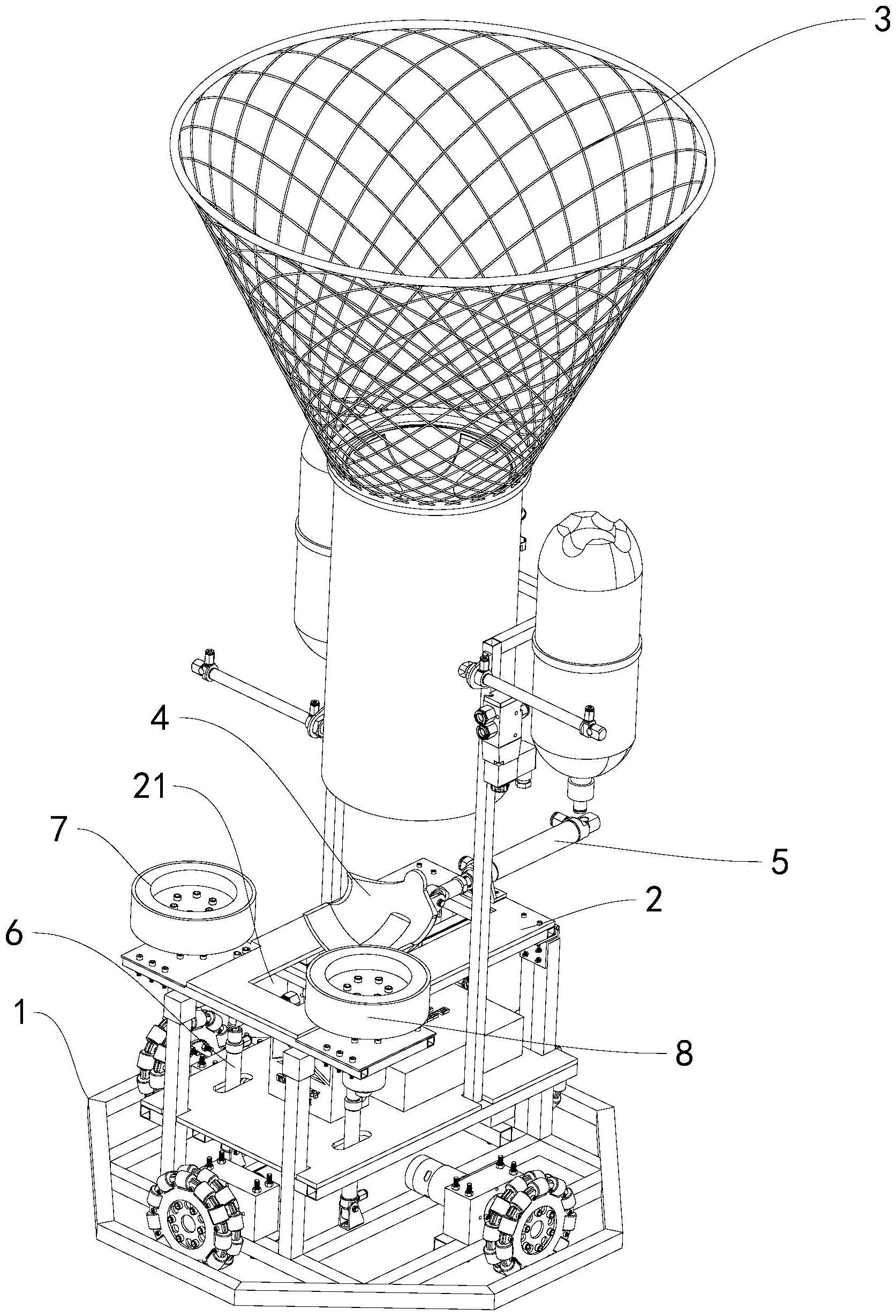
2、一种驱动结构,包括:
3、机架;
4、发射座,所述发射座安设于所述机架且所述发射座上设有送球位和发球位;
5、球筐,所述球筐安设于所述机架且位于所述送球位的上方;
6、送球结构,所述送球结构包括用于承托球体的托球座以及用于控制所述托球座于所述送球位和发球位往复运动的第一驱动装置,所述第一驱动装置安设于所述发射座;
7、发球结构,所述发球结构安设于所述发球位。
8、上述驱动结构,通过设置有发射座且发射座设有送球位和发球位,送球结构位于送球位,发球结构位于发球位,如此,通过送球结构将球体输送至发球结构,最后通过发球结构将球体发射给运动员;通过设置有球筐,运动员可以实现投篮,而且由于篮筐位于送球位的上方,因此,当运动员将球体投至球筐内,与此同时,托球座恰好运动至送球位时,球筐内的球体落入至托球座;通过设置有托球座,托球座用于承托球体,同时,通过设置有第一驱动装置,利用第一驱动装置将托球座于送球位和发球位之间往复运动,当第一驱动装置将承托有球体的托球座驱动至发球位,发球结构将位于发球位的球体发射给运动员。本驱动结构解决了传统的篮球机器人抓球机构仅仅只能实现抓球,并无法实现射球功能和进球功能的问题。
9、进一步地,所述发射座设有通孔,所述通孔的一端位于所述送球位,所述通孔的另一端位于所述发球位。
10、进一步地,所述发射座设有导轨,所述导轨的垂直投影面位于所述通孔的垂直投影面内。
11、进一步地,所述导轨上滑动连接有滑块,所述滑块与所述托球座连接。
12、进一步地,驱动结构还包括用于控制所述发射座的倾斜角度的升降装置;所述发射座与所述机架铰接;所述升降装置安设于所述机架,所述升降装置的输出端与所述发射座铰接。
13、进一步地,所述发球结构包括均位于所述发球位的第一摩擦轮和第二摩擦轮;所述第一摩擦轮和第二摩擦轮之间预留有供所述球体通过的空间。
14、进一步地,所述发球结构还包括用于驱动所述第一摩擦轮转动的第二驱动装置与用于驱动所述第二摩擦轮转动的第三驱动装置;第二驱动装置与所述第三驱动装置均安设于所述发射座。
15、进一步地,所述球筐包括由上至下依次连接的筐体和导向管;所述导向管与所述机架连接,所述导向管呈竖直方向设置且两端连通,所述筐体的顶部设有开口,所述导向管与所述开口连通。
16、进一步地,驱动结构还包括安设于所述导向管的内壁的第一缓冲介质和第二缓冲介质,所述第一缓冲介质位于所述导向管的一端,所述第二缓冲介质位于所述导向管的另一端。
17、一种移动机器人,包括上述的驱动结构以及多个驱动轮,所述驱动轮安设于所述机架。
18、上述移动机器人,通过设置有驱动轮,从而控制驱动结构进行运动,从而适应不同位置不同角度的投球和射球需求。
技术特征:
1.一种驱动结构,其特征在于,包括:
2.根据权利要求1所述的驱动结构,其特征在于,所述发射座设有通孔,所述通孔的一端位于所述送球位,所述通孔的另一端位于所述发球位。
3.根据权利要求2所述的驱动结构,其特征在于,所述发射座设有导轨,所述导轨的垂直投影面位于所述通孔的垂直投影面内。
4.根据权利要求3所述的驱动结构,其特征在于,所述导轨上滑动连接有滑块,所述滑块与所述托球座连接。
5.根据权利要求1所述的驱动结构,其特征在于,还包括用于控制所述发射座的倾斜角度的升降装置;所述发射座与所述机架铰接;所述升降装置安设于所述机架,所述升降装置的输出端与所述发射座铰接。
6.根据权利要求5所述的驱动结构,其特征在于,所述发球结构包括均位于所述发球位的第一摩擦轮和第二摩擦轮;所述第一摩擦轮和第二摩擦轮之间预留有供所述球体通过的空间。
7.根据权利要求6所述的驱动结构,其特征在于,所述发球结构还包括用于驱动所述第一摩擦轮转动的第二驱动装置与用于驱动所述第二摩擦轮转动的第三驱动装置;第二驱动装置与所述第三驱动装置均安设于所述发射座。
8.根据权利要求7所述的驱动结构,其特征在于,所述球筐包括由上至下依次连接的筐体和导向管;所述导向管与所述机架连接,所述导向管呈竖直方向设置且两端连通,所述筐体的顶部设有开口,所述导向管与所述开口连通。
9.根据权利要求8所述的驱动结构,其特征在于,还包括安设于所述导向管的内壁的第一缓冲介质和第二缓冲介质,所述第一缓冲介质位于所述导向管的一端,所述第二缓冲介质位于所述导向管的另一端。
10.一种机器人,其特征在于,包括如权利要求1~9任意一项所述的驱动结构以及多个驱动轮,所述驱动轮安设于所述机架。
技术总结
本技术提供了一种驱动结构,其包括机架、发射座、球筐、送球结构以及发球结构;所述发射座安设于所述机架且所述发射座上设有送球位和发球位;所述球筐安设于所述机架且位于所述送球位的上方;所述送球结构包括用于承托球体的托球座以及用于控制所述托球座于所述送球位和发球位往复运动的第一驱动装置,所述第一驱动装置安设于所述发射座;所述发球结构安设于所述发球位。本技术还公开了一种机器人,其包括驱动结构以及安设于驱动结构的机架的驱动轮。本技术具有结构简单、实用性强且自动化程度高的优点。
技术研发人员:王志锋,范金威,童俊,王培洲,郑焕楠,操健,吴泽涛,文吉昌,许文燕,陈友鹏
受保护的技术使用者:佛山科学技术学院
技术研发日:20221207
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!