碰撞类智能体的控制方法、计算机设备及存储介质与流程
本申请涉及人工智能领域,尤其涉及一种碰撞类游戏虚拟对象的控制方法、计算机设备及存储介质。
背景技术:
1、弹球游戏由于兼具了随机性、趣味性和竞技性而深受玩家喜爱,稍微改变机关的位置和角度、弹球的发射力度和发射角度,游戏的结果也大不相同,正是因为这种随机性,使得通过人工智能控制弹球游戏具有一定的难度,现有技术中亟需一种针对弹球游戏的、有效的控制方法。
技术实现思路
1、本申请的主要目的在于提供一种碰撞类智能体的控制方法、计算机设备及存储介质,旨在提高碰撞类智能体的有效性。
2、第一方面,本申请提供一种碰撞类智能体的控制方法,所述碰撞类智能体的控制方法包括以下步骤:
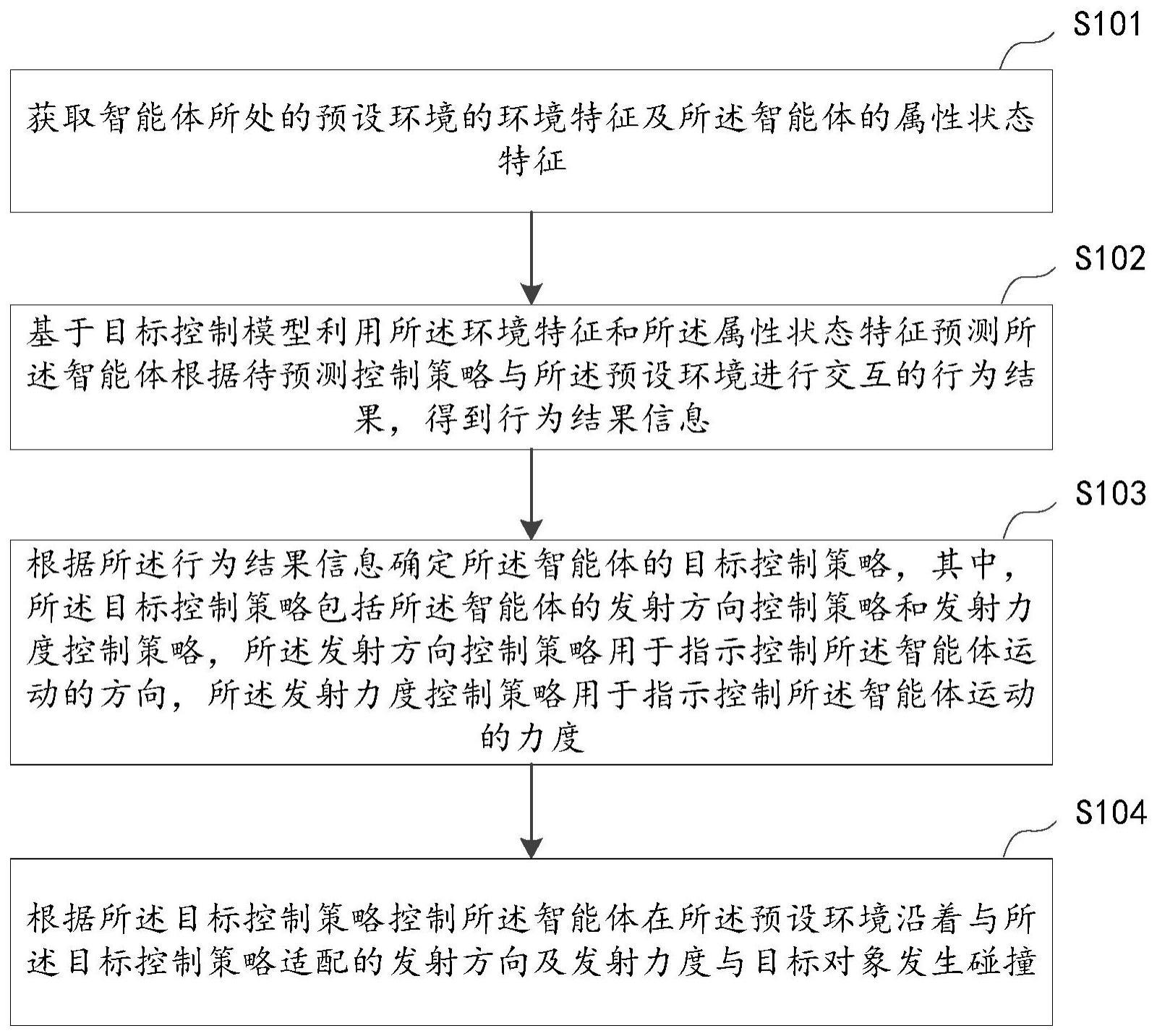
3、获取智能体所处的预设环境的环境特征及所述智能体的属性状态特征;
4、基于目标控制模型利用所述环境特征和所述属性状态特征预测所述智能体根据待预测控制策略与所述预设环境进行交互的行为结果,得到行为结果信息;
5、根据所述行为结果信息确定所述智能体的目标控制策略,其中,所述目标控制策略包括所述智能体的发射方向控制策略和发射力度控制策略,所述发射方向控制策略用于指示控制所述智能体运动的方向,所述发射力度控制策略用于指示控制所述智能体运动的力度;
6、根据所述目标控制策略控制所述智能体在所述预设环境沿着与所述目标控制策略适配的发射方向及发射力度与目标对象发生碰撞。
7、第二方面,本申请还提供一种计算机设备,包括处理器、存储器、以及存储在所述存储器上并可被所述处理器执行的计算机程序,其中所述计算机程序被所述处理器执行时,实现如本申请实施例任一项所述的碰撞类智能体的控制方法的步骤。
8、第三方面,本申请还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,其中所述计算机程序被处理器执行时,实现如本申请实施例任一项所述的碰撞类智能体的控制方法。
9、本申请提供一种碰撞类智能体的控制方法、计算机设备及存储介质,本申请通过获取智能体所处的预设环境的环境特征及所述智能体的属性状态特征;基于目标控制模型利用所述环境特征和所述属性状态特征预测所述智能体根据待预测控制策略与所述预设环境进行交互的行为结果,得到行为结果信息;根据所述行为结果信息确定所述智能体的目标控制策略,其中,所述目标控制策略包括所述智能体的发射方向控制策略和发射力度控制策略,所述发射方向控制策略用于指示控制所述智能体运动的方向,所述发射力度控制策略用于指示控制所述智能体运动的力度;根据所述目标控制策略控制所述智能体在所述预设环境沿着与所述目标控制策略适配的发射方向及发射力度与目标对象发生碰撞。能够减小目标控制模型的计算量,以及提高碰撞类智能体的有效性。
技术特征:
1.一种碰撞类智能体的控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的碰撞类智能体的控制方法,其特征在于,所述基于目标控制模型利用所述环境特征和所述属性状态特征预测所述智能体根据待预测控制策略与所述预设环境进行交互的行为结果,得到行为结果信息,包括:
3.根据权利要求2所述的碰撞类智能体的控制方法,其特征在于,所述根据所述环境特征和所述属性状态特征,将所述智能体在所述预设环境中的至少一个候选控制策略确定为等效控制策略,包括:
4.根据权利要求1所述的碰撞类智能体的控制方法,其特征在于,所述基于目标控制模型利用所述环境特征和所述属性状态特征预测所述智能体根据待预测控制策略与所述预设环境进行交互的行为结果,得到行为结果信息,包括:
5.根据权利要求4所述的碰撞类智能体的控制方法,其特征在于,所述根据预设的最大碰撞次数,将至少一个候选控制策略确定为无效控制策略,包括:
6.根据权利要求1所述的碰撞类游戏虚拟对象的控制方法,其特征在于,所述基于目标控制模型利用所述环境特征和所述属性状态特征预测所述智能体根据待预测控制策略与所述预设环境进行交互的行为结果,得到行为结果信息,包括:
7.根据权利要求1-6任一项所述的碰撞类智能体的控制方法,其特征在于,所述方法还包括:
8.根据权利要求7所述的碰撞类智能体的控制方法,其特征在于,所述获取历史游戏数据,从所述历史游戏数据中确定目标游戏数据,包括:
9.一种计算机设备,其特征在于,所述计算机设备包括处理器、存储器、以及存储在所述存储器上并可被所述处理器执行的计算机程序,其中所述计算机程序被所述处理器执行时,实现如权利要求1至8中任一项所述的碰撞类智能体的控制方法的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,其中所述计算机程序被处理器执行时,实现如权利要求1至8中任一项所述的碰撞类智能体的控制方法的步骤。
技术总结
本申请涉及人工智能领域,提供一种碰撞类智能体的控制方法、计算机设备及存储介质,该方法包括:获取智能体所处的预设环境的环境特征及所述智能体的属性状态特征;基于目标控制模型利用所述环境特征和所述属性状态特征预测所述智能体根据待预测控制策略与所述预设环境进行交互的行为结果,得到行为结果信息;根据所述行为结果信息确定所述智能体的目标控制策略;根据所述目标控制策略控制所述智能体在所述预设环境沿着与所述目标控制策略适配的发射方向及发射力度与目标对象发生碰撞。能够减小目标控制模型的计算量,以及提高碰撞类智能体的有效性。
技术研发人员:王波,周正,朱展图
受保护的技术使用者:超参数科技(深圳)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!