一种乒乓球拾取机器人的工作方法
本发明涉及服务机器人,特别是涉及一种基于ros的乒乓球拾取机器人的工作方法。
背景技术:
1、近年来,科技企业和政府纷纷加大对服务机器人技术的投入和支持力度,越来越多的服务机器人已经在我们的日常生活中得以应用。乒乓球在中国是一项具有广泛群众基础的运动项目。在乒乓球的练习过程中会散落大量乒乓球,人工拾取乒乓球影响训练的效率,每个球场安排专人捡球人力成本较高,因此可通过乒乓球拾取机器人捡球,效率高且成本低。然而,现有的乒乓球拾取机器人大多数使用hsv颜色空间进行乒乓球检测,这种方法只考虑目标物的颜色和形状,很容易出现漏检和误检的情况。
技术实现思路
1、本发明的目的是提供一种乒乓球拾取机器人的工作方法,可提高乒乓球检测准确率,避免出现漏检和误检的情况。
2、为实现上述目的,本发明提供了如下方案:
3、一种乒乓球拾取机器人的工作方法,所述工作方法包括:
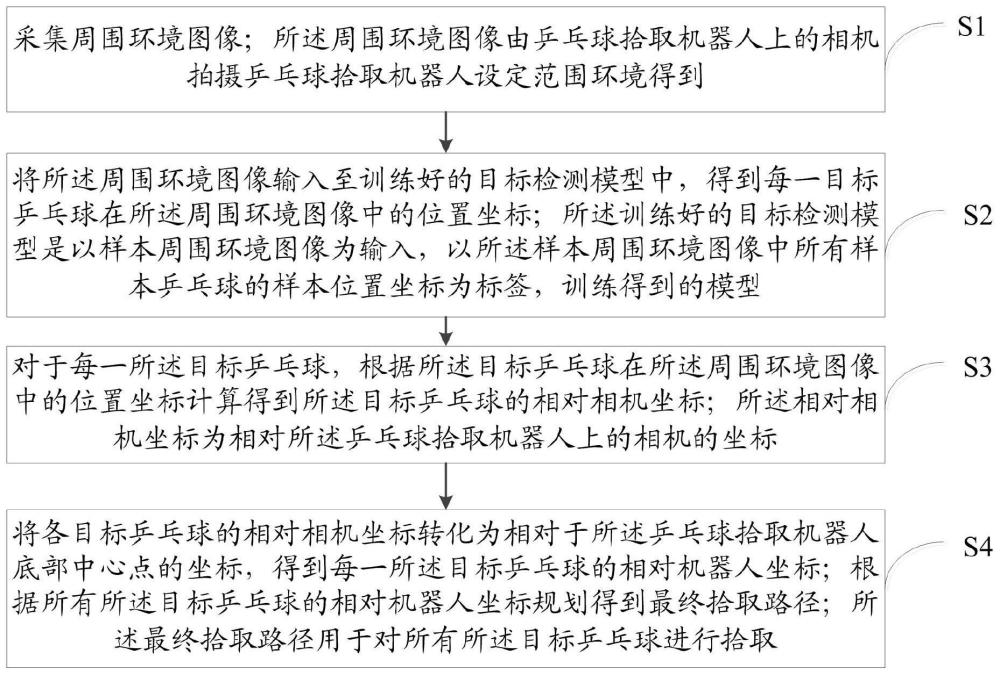
4、采集周围环境图像;所述周围环境图像由乒乓球拾取机器人上的相机拍摄乒乓球拾取机器人设定范围环境得到;
5、将所述周围环境图像输入至训练好的目标检测模型中,得到每一目标乒乓球在所述周围环境图像中的位置坐标;所述训练好的目标检测模型是以样本周围环境图像为输入,以所述样本周围环境图像中所有样本乒乓球的样本位置坐标为标签,训练得到的模型;
6、对于每一所述目标乒乓球,根据所述目标乒乓球在所述周围环境图像中的位置坐标计算得到所述目标乒乓球的相对相机坐标;所述相对相机坐标为相对所述乒乓球拾取机器人上的相机的坐标;
7、将各目标乒乓球的相对相机坐标转化为相对于所述乒乓球拾取机器人底部中心点的坐标,得到每一所述目标乒乓球的相对机器人坐标;根据所有所述目标乒乓球的相对机器人坐标规划得到最终拾取路径;所述最终拾取路径用于对所有所述目标乒乓球进行拾取。
8、可选的,根据所有所述目标乒乓球的相对机器人坐标规划得到最终拾取路径,具体包括:
9、采用蚁群算法和全覆盖路径规划算法根据所有所述目标乒乓球的相对机器人坐标规划得到最终拾取路径。
10、可选的,采用蚁群算法和全覆盖路径规划算法根据所有所述目标乒乓球的相对机器人坐标规划得到最终拾取路径,具体包括:
11、根据所有所述目标乒乓球的相对机器人坐标将所有目标乒乓球划分为若干个区域内;在任意一所述区域内的任意两个目标乒乓球的距离小于设定阈值距离;任一所述区域内所有目标乒乓球与另一任意区域内所有目标乒乓球的的距离不小于设定阈值距离;
12、对于每一所述区域,判断所述区域内目标乒乓球是否能被所述乒乓球拾取机器人一次拾取,若是,将所述区域记为第一区域,若否,则将所述区域记为第二区域;
13、采用蚁群算法根据所有所述区域的中心点坐标规划得到初始拾取路径;
14、对于每一所述第二区域,采用全覆盖路径规划算法根据所述第二区域内目标乒乓球的相对相机坐标规划得到所述第二区域内目标乒乓球的全覆盖拾取路径;
15、当存在第二区域时,将所述第二区域的全覆盖拾取路径替换所述初始拾取路径中第二区域对应的初始拾取路径,得到最终拾取路径。
16、可选的,所述区域为矩形区域,所述判断所述区域内目标乒乓球是否能被所述乒乓球拾取机器人一次拾取,具体包括:
17、根据所述矩形区域的对角线长度和所述乒乓球拾取机器人的收集宽度判读所述矩形区域内目标乒乓球是否能被所述乒乓球拾取机器人一次拾取,当所述矩形区域的对角线长度大于所述乒乓球拾取机器人的收集宽度时,矩形区域内目标乒乓球不能被所述乒乓球拾取机器人一次拾取,当所述矩形区域的对角线长度不大于所述乒乓球拾取机器人的收集宽度时,矩形区域内目标乒乓球能被所述乒乓球拾取机器人一次拾取。
18、可选的,在得到最终拾取路径之后,还包括:
19、构建所述乒乓球拾取机器人工作环境的全局代价地图;所述全局代价地图包括若干静态障碍物的相对机器人坐标;
20、采用a*算法根据所有所述目标乒乓球的相对机器人坐标和所有所述静态障碍物的相对机器人坐标进行路径规划,得到第一躲避拾取路径。
21、可选的,在得到每一所述目标乒乓球的相对机器人坐标之后,还包括:
22、判断是否存在动态障碍物,若存在,则采用dwa局部路径规划算法进行局部路径规划,以避开动态障碍物,得到第二躲避拾取路径。
23、可选的,当在所述最终拾取路径中存在两个障碍物,且两个障碍物的距离小于所述乒乓球拾取机器人的车身最大宽度时,控制所述乒乓球拾取机器人进行原地旋转,并重新规划拾取路线。
24、可选的,构建所述乒乓球拾取机器人工作环境的全局代价地图,具体包括:
25、利用二维激光雷达获取所述乒乓球拾取机器人工作环境中静态障碍物的二维点云信息;
26、利用深度相机采集所述乒乓球拾取机器人工作环境的三维局部深度图像;
27、将所述三维局部深度图像投影为二维点云图,得到相机坐标系下三维坐标点和激光雷达坐标系下二维点云信息的对应关系;
28、根据所述对应关系将二维点云信息与所述二维点云图融合构建工作环境栅格地图;所述工作环境栅格地图为所述全局代价地图。
29、根据本发明提供的具体实施例,本发明公开了以下技术效果:本发明提供了一种乒乓球拾取机器人的工作方法,该方法包括:采集周围环境图像;周围环境图像由乒乓球拾取机器人上的相机拍摄乒乓球拾取机器人设定范围环境得到;将周围环境图像输入至训练好的目标检测模型中,得到每一目标乒乓球在周围环境图像中的位置坐标;训练好的目标检测模型是以样本周围环境图像为输入,以样本周围环境图像中所有样本乒乓球的样本位置坐标为标签,训练得到的模型;对于每一目标乒乓球,根据目标乒乓球在周围环境图像中的位置坐标计算得到目标乒乓球的相对相机坐标;相对相机坐标为相对乒乓球拾取机器人上的相机的坐标;将各目标乒乓球的相对相机坐标转化为相对于乒乓球拾取机器人底部中心点的坐标,得到每一目标乒乓球的相对机器人坐标;根据所有目标乒乓球的相对机器人坐标规划得到最终拾取路径;最终拾取路径用于对所有目标乒乓球进行拾取。本发明采用目标检测模型对乒乓球进行检测识别,可提高乒乓球检测准确率,避免出现漏检和误检的情况。
技术特征:
1.一种乒乓球拾取机器人的工作方法,其特征在于,所述工作方法包括:
2.根据权利要求1所述的乒乓球拾取机器人的工作方法,其特征在于,根据所有所述目标乒乓球的相对机器人坐标规划得到最终拾取路径,具体包括:
3.根据权利要求2所述的乒乓球拾取机器人的工作方法,其特征在于,采用蚁群算法和全覆盖路径规划算法根据所有所述目标乒乓球的相对机器人坐标规划得到最终拾取路径,具体包括:
4.根据权利要求3所述的乒乓球拾取机器人的工作方法,其特征在于,所述区域为矩形区域,所述判断所述区域内目标乒乓球是否能被所述乒乓球拾取机器人一次拾取,具体包括:
5.根据权利要求1所述的乒乓球拾取机器人的工作方法,其特征在于,在得到最终拾取路径之后,还包括:
6.根据权利要求5所述的乒乓球拾取机器人的工作方法,其特征在于,在得到每一所述目标乒乓球的相对机器人坐标之后,还包括:
7.根据权利要求1所述的乒乓球拾取机器人的工作方法,其特征在于,所述方法还包括:
8.根据权利要求5所述的乒乓球拾取机器人的工作方法,其特征在于,构建所述乒乓球拾取机器人工作环境的全局代价地图,具体包括:
技术总结
本发明公开一种乒乓球拾取机器人的工作方法,涉及服务机器人领域,该方法包括采集周围环境图像;周围环境图像由乒乓球拾取机器人上的相机拍摄乒乓球拾取机器人设定范围环境得到;将周围环境图像输入至训练好的目标检测模型中,得到每一目标乒乓球在周围环境图像中的位置坐标;对于每一目标乒乓球,根据目标乒乓球在周围环境图像中的位置坐标计算得到目标乒乓球的相对相机坐标;相对相机坐标转化得到每一目标乒乓球的相对机器人坐标,根据所有目标乒乓球的相对机器人坐标规划得到最终拾取路径;最终拾取路径用于对所有目标乒乓球进行拾取。本发明采用目标检测模型对乒乓球进行检测识别,可提高乒乓球检测准确率,避免出现漏检和误检的情况。
技术研发人员:钟勇,张树,范周慧,李少伟,李方舟,邱煌乐
受保护的技术使用者:福建理工大学
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!