一种人体互助训练方法及系统与流程
本发明涉及人体机能训练领域,特别涉及一种人体互助训练方法及系统。
背景技术:
1、为了保证人体机能的正常状态,通常会采用辅助设备对人体部位进行针对性的训练,在中国专利文献公开号为cn219207920u,名称为一种镜像康复机器人系统的一份专利文献中公开了一种镜像康复机器人系统,包括牵引部,设于移动机器人处且用于与患侧手相配合;力传感器,设于所述牵引部处;于所述移动机器人带动所述患侧手移动的状态下,所述力传感器实时监测所述患侧手作用于所述牵引部处的力;本申请的一种镜像康复机器人系统,其通过对移动机器人的结构和功能的改进,实现移动机器人不仅仅具有带动患侧手运动的作用,还可以用来与患侧手以及周围环境交互,进一步地能够较佳地对患者的大脑镜像神经进行刺激,起到加速患者的康复的效果。
2、以上所述镜像康复机器人系统只是用来患者独立训练,无法形成患者之间的联动。一个治疗中心康复的患者康复程度大多不同,有一些患者康复程度高,可以独立进行主动训练,但大量机械化的训练容易产生厌倦情绪。另一些患者康复程度低,就无法单独训练,或者参与一些训练游戏,需要占用康复师更多的时间和精力。
技术实现思路
1、本发明的目的在于提供一种人体互助训练方法及系统,使得康复程度高的患者可以带动康复程度低的患者进行训练,患者群体之间可以有效有趣的互动,减轻康复师工作量。
2、为解决上述技术问题,本发明的实施方式提供了一种人体互助训练方法,包括以下步骤:
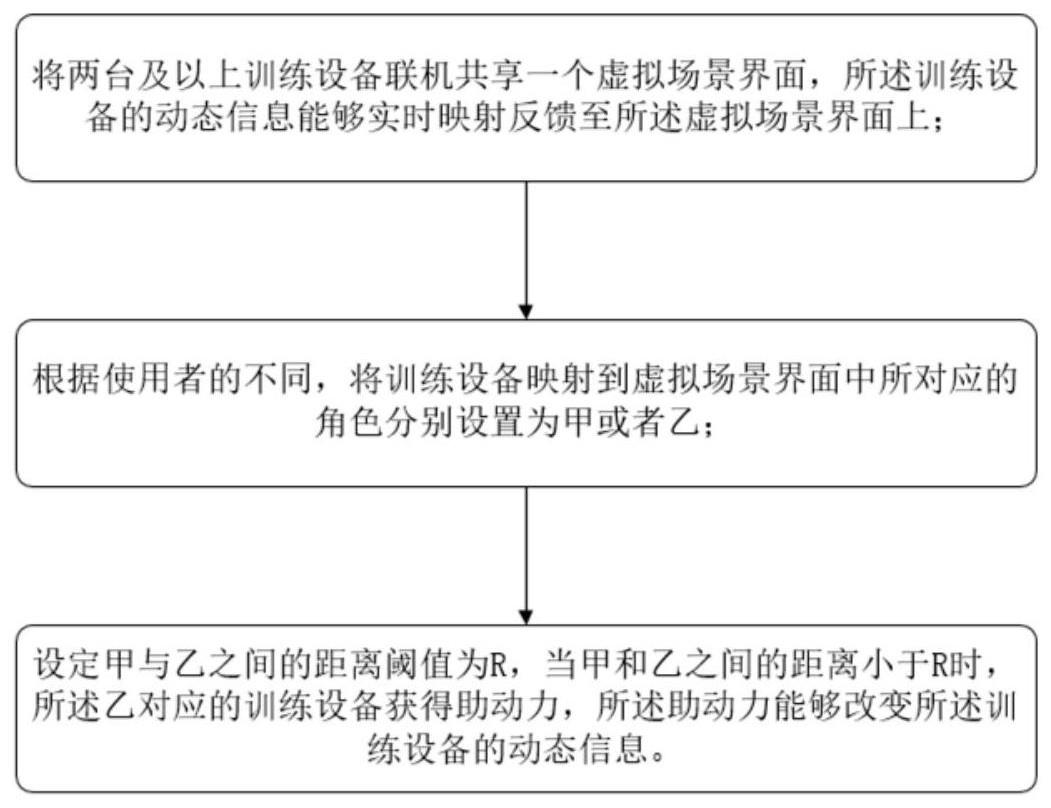
3、将两台及以上训练设备联机共享一个虚拟场景界面,所述训练设备的动态信息能够实时映射反馈至所述虚拟场景界面上;
4、根据使用者的不同,将训练设备映射到虚拟场景界面中所对应的角色分别设置为甲或者乙;
5、设定甲与乙之间的距离阈值为r,当甲和乙之间的距离小于r时,所述乙对应的训练设备获得助动力,所述助动力能够改变所述训练设备的动态信息。
6、进一步,当甲和乙的距离小于r时,所述助动力大小与甲与乙之间距离成反比。
7、进一步,设定所述助动力最大值为f,甲与乙之间的实时距离为d,实时助动力为f,则。
8、进一步,当甲和乙之间的距离小于r时,所述乙跟随甲移动轨迹进行运动,乙的移动速度与其所对应的训练设备所获的助动力成正比。
9、进一步,当乙对应的训练设备受到的使用者施加的作用力大于所获得的助动力时,则所述乙脱离甲的移动轨迹,进行自主运动。
10、本发明的实施方式提供了一种人体互助训练系统,包括多台训练设备及与训练设备通讯连接的显示屏,所述多台设备的动态信息能够实时映射反馈至同一虚拟场景界面中,其中,当两个训练设备映射至同一虚拟场景界面中的角色位置靠近时,其中一个角色所对应的训练设备能够获得助动力,所述助动力能够改变所述训练设备的动态信息。
11、进一步,所述多台训练设备均配置有一个与其通讯连接的显示屏,多台设备的显示屏能够联机共享同一虚拟场景界面。
12、进一步,两个训练设备映射至同一虚拟场景界面中的角色位置之间的距离阈值是r,当两个角色位置之间距离小于r时,其中一个角色所对应的训练设备获得助动力,所述助动力大小与两个角色位置之间距离成反比。
13、进一步,一个角色所对应的训练设备获得助动力的最大值为f,同一虚拟场景界面中两个角色实时距离为d,则所述角色对应的训练设备所获得的实时助动力为
14、进一步,获得助动力的训练设备对应的角色跟随另一个角色运动轨迹运动。
15、本发明所提供的人体互助训练方法及系统,相对于现有技术,通过将训练设备的联机,以及根据使用者人体机能状况的不同,将使用者对应的训练设备的动态信息映射反馈至同一虚拟场景界面中,分别设置不同的角色,不同角色在同一个虚拟场景界面中之间距离变化,使得训练设备的使用者之间能够产生有趣的互动,增加训练设备使用者之间的交流与协助,当将发明所提供的人体互助训练方法及系统用于康复训练时,能够使得让康复程度高的患者可以带动康复程度低的患者进行训练,患者群体之间可以有效有趣的互动,减轻康复师工作量。
技术特征:
1.一种人体互助训练方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的人体互助训练方法,其特征在于,当甲和乙的距离小于r时,所述助动力大小与甲与乙之间距离成反比。
3.根据权利要求2所述的人体互助训练方法,其特征在于,设定所述助动力最大值为f,甲与乙之间的实时距离为d,实时助动力为f,则
4.根据权利要求1所述的人体互助训练方法,其特征在于,当甲和乙之间的距离小于r时,所述乙跟随甲移动轨迹进行运动,乙的移动速度与其所对应的训练设备所获的助动力成正比。
5.根据权法利要求4所述的人体互助训练方法,其特征在于,当乙对应的训练设备受到的使用者施加的作用力大于所获得的助动力时,则所述乙脱离甲的移动轨迹,进行自主运动。
6.一种人体互助训练系统,其特征在于,包括多台训练设备及与训练设备通讯连接的显示屏,所述多台设备的动态信息能够实时映射反馈至同一虚拟场景界面中,其中,当两个训练设备映射至同一虚拟场景界面中的角色位置靠近时,其中一个角色所对应的训练设备能够获得助动力,所述助动力能够改变所述训练设备的动态信息。
7.根据权利要求6所述的人体互助训练系统,其特征在于,所述多台训练设备均配置有一个与其通讯连接的显示屏,多台设备的显示屏能够联机共享同一虚拟场景界面。
8.根据权利要求6所述的人体互助训练系统,其特征在于,两个训练设备映射至同一虚拟场景界面中的角色位置之间的距离阈值是r,当两个角色位置之间距离小于r时,其中一个角色所对应的训练设备获得助动力,所述助动力大小与两个角色位置之间距离成反比。
9.根据权利要求8所述的人体互助训练系统,其特征在于,一个角色所对应的训练设备获得助动力的最大值为f,同一虚拟场景界面中两个角色实时距离为d,则所述角色对应的训练设备所获得的实时助动力为
10.根据权利要求6-9任一项所述的人体互助训练系统,其特征在于,获得助动力的训练设备对应的角色跟随另一个角色运动轨迹运动。
技术总结
本发明涉及人体机能训练领域,特别涉及一种人体互助训练方法及系统,本发明中所提供人体互助训练方法,包括以下步骤:将两台及以上训练设备联机共享一个虚拟场景界面,所述训练设备的动态信息能够实时映射反馈至所述虚拟场景界面上;将训练设备映射到虚拟场景界面中的角色不同,不同角色之间在一定的距离下能够产生相互作用,使得其中一个角色对应的训练设备获得助动力,所述助动力能够改变所述训练设备的动态信息,本发明还提供了一种人体互助训练系统,用于实现上述人体互助训练方法,通过不同训练设备之间的相互作用,使得康复程度高的患者可以带动康复程度低的患者进行训练,患者群体之间可以有效有趣地互动,减轻康复师工作量。
技术研发人员:张一楠,徐培麒,姜从玉
受保护的技术使用者:苏州智康机器人有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!