一种力量训练器及其力量训练方法与流程
本发明属于健身器,具体涉及一种力量训练器及其力量训练方法。
背景技术:
1、目前市场上的力量型训练器材,基本都是采用绳动单方向出力方式进行训练,即用胳膊或腿部的力量拉动配重块上升,通过增加或减少配重块的数量来调控训练阻力的大小;有些训练器材采用电机提供负载力的方式替代配重块,电机单方向旋转以产生与人力相对抗的阻力,但需要始终给电机通电且电机只能一个方向旋转。另外,上述使用配重块或阻力电机的健身器材,训练期间不能自动定住停止,人体受力都比较大,训练安全性相对较差,也无法满足不同力量人群的不同健身或康复训练需求。
技术实现思路
1、针对相关技术中存在的不足之处,本发明提供一种力量训练器及其力量训练方法,旨在解决现有力量型训练器材仅能单方向出力进行训练的问题,实现双方向的力量训练,并能满足不同力量人群的不同训练需求,提高训练安全性。
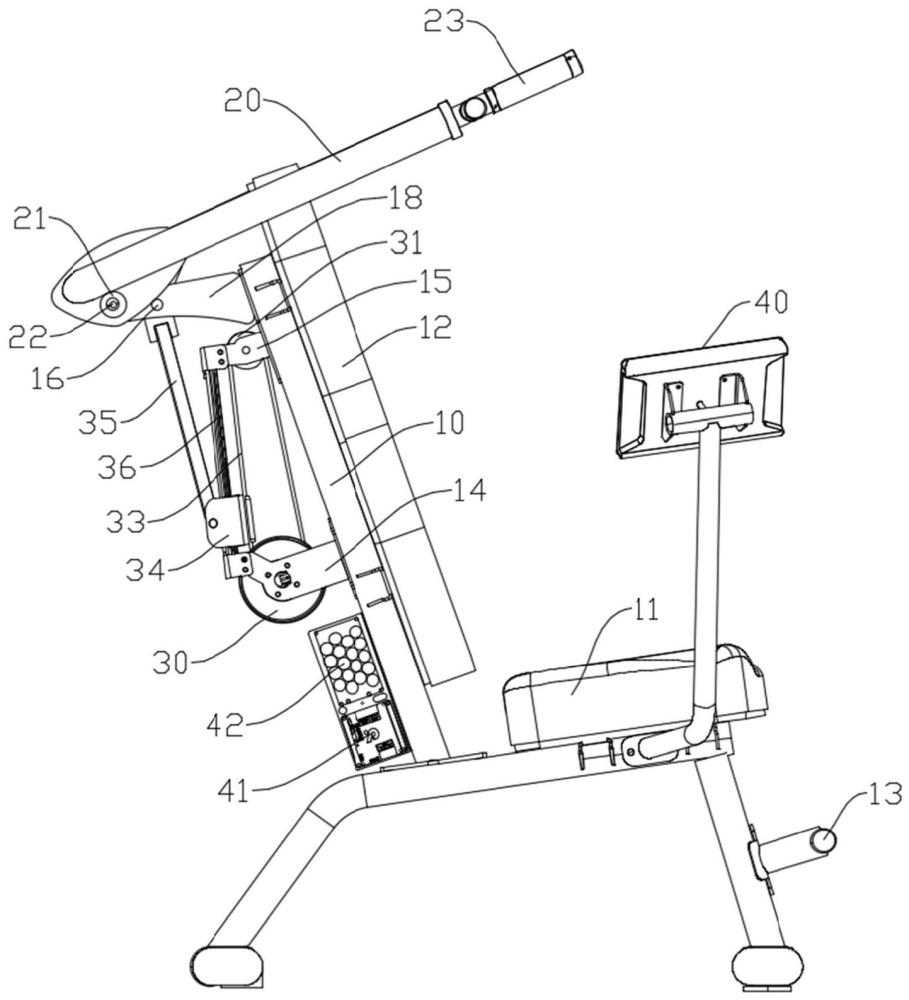
2、本发明提供一种力量训练器,包括:
3、机架;
4、推拉臂,其一端为连接端,转动连接于机架顶部;另一端为把手端,供训练者握持;
5、传动机构,位于推拉臂的下方,传动机构具体包括:
6、盘式伺服电机,包括定子、套设于定子外的转子以及保持制动器,盘式伺服电机的轴向两端与机架连接;
7、从动轮,布设于盘式伺服电机的上方,从动轮的轴向与盘式伺服电机的轴向平行;从动轮的轴向两端与机架转动连接;
8、传输件,包绕在转子和从动轮上,传输件可在外力作用下往复运动;传输件远离机架的外侧连接有一定位件;
9、连杆,一端与推拉臂转动连接,另一端与定位件转动连接;
10、驱动器,安装于机架上并与盘式伺服电机电连接,以控制盘式伺服电机正转、反转或停转锁定,并调控其电机扭矩;
11、人机交互装置,安装于机架的一侧,其内置多种训练模式并具有触摸屏,以供训练者进行训练数据交互操作;人机交互装置与驱动器通信连接,以使驱动器根据训练模式来控制盘式伺服电机的转动。
12、在其中一些实施例中,力量训练器还包括安装于机架上的电容模块和泄放电阻;电容模块的输入端与外部电源连接,输出端与驱动器连接,电容模块用于为驱动器提供电力供应;泄放电阻与驱动器连接,用于释放力量训练时产生的多余电能。
13、在其中一些实施例中,传动机构还包括导轨,导轨布设于传输件远离机架的外侧,且其长度方向平行于该侧传输件的传输方向;导轨的两端分别与机架连接,定位件的一端连接于传输件上,另一端与导轨滑动连接。
14、在其中一些实施例中,力量训练器还包括机械限位装置,机械限位装置包括设置于机架上的上限位件和下限位件;下限位件用于对推拉臂最下位置进行限定,当推拉臂到达最下位置时,定位件滑动至导轨下端;上限位件用于对推拉臂的最上位置进行限定,当推拉臂到达最上位置时,定位件滑动至导轨上端。
15、在其中一些实施例中,传动机构还包括主动轮,主动轮套接于转子的外部;传输件包绕在主动轮和从动轮上;传输件为同步带,主动轮和从动轮上均设有适配同步带的齿槽结构。
16、在其中一些实施例中,推拉臂的把手端设有启停键,启停键与人机交互装置通信连接。当使用力量训练器进行训练时,按下启停键,人机交互装置向驱动器发出启动指令,驱动器控制盘式伺服电机的转动;再次按下启停键,人机交互装置向驱动器发出制动指令,经驱动器使盘式伺服电机停转,保持制动器启动以对盘式伺服电机进行位置锁定。
17、本发明还提供一种力量训练方法,基于上述的力量训练器进行,包括如下步骤:
18、训练者在人机交互装置的触摸屏上注册登录后,选择训练模式并设定该训练模式下的训练数据;训练模式包括主动对抗模式、被动推拉模式、等速模式;训练数据包括电机扭矩、最高安全心率、最低安全心率;
19、驱动器根据已选择的训练模式控制盘式伺服电机的转动;
20、训练者握住推拉臂的把手端进行上推及下拉的双方向力量训练;训练者在力量训练期间佩戴心率传感器,人机交互装置与心率传感器通信连接,以实时监测训练者的心率情况;若心率位于最高安全心率和最低安全心率的范围之外,则判断训练者心率异常,人机交互装置发出警报并向驱动器发出制动指令,使盘式伺服电机停转,保持制动器启动以对盘式伺服电机进行位置锁定。
21、在其中一些实施例中,训练者在主动对抗模式下进行力量训练时,
22、训练者注册登录后进行交互操作,获取训练者基本信息,据此设置该训练者的主动力矩,参考主动力矩设定电机扭矩,并使电机扭矩小于主动力矩;
23、电容模块给驱动器供电,驱动器根据设定的电机扭矩驱动盘式伺服电机来回正反转;
24、训练者握住推拉臂的把手端施力进行上推及下拉,以克服电机扭矩使推拉臂来回转动,经连杆和定位件带动传输件往复运动,进而带动盘式伺服电机转动,实现主动对抗模式下的力量训练;此训练期间,盘式伺服电机转动产生多余电能,通过泄放电阻对多余电能进行释放。
25、在其中一些实施例中,训练者在被动推拉模式下进行力量训练时,
26、训练者注册登录后进行交互操作,获取训练者基本信息,据此设置该训练者的被动力矩,参考被动力矩设定电机扭矩,并使电机扭矩大于被动力矩;
27、电容模块给驱动器供电,驱动器根据设定的电机扭矩驱动盘式伺服电机来回正反转,经传输件带动定位件往复直线运动,再经连杆带动推拉臂来回转动,进而带动握住推拉臂把手端的训练者实现被动推拉模式下的力量训练。
28、在其中一些实施例中,训练数据还包括步进扭矩、最快理想心率、最慢理想心率;训练者在力量训练期间,若心率正常但高于最快理想心率,则自动降低电机扭矩,降低量为至少一个步进扭矩;若心率正常但低于最慢理想心率,则自动增加电机扭矩,增加量为至少一个步进扭矩;若心率位于最快理想心率和最慢理想心率的范围内,则保持电机扭矩不变。
29、在其中一些实施例中,训练者在等速模式下进行力量训练时,
30、电容模块给驱动器供电,驱动器给盘式伺服电机通电,以启动保持制动器对盘式伺服电机进行位置锁定;
31、训练者握住推拉臂的把手端施力进行上推及下拉,推拉的同时保持制动器即关闭,推拉臂受力来回转动,经连杆和定位件带动传输件往复运动,进而带动盘式伺服电机来回正反转,实现等速模式下的力量训练;
32、在等速模式训练期间,当训练者停止施力时,推拉臂停止转动,保持制动器启动以对盘式伺服电机进行位置锁定。
33、基于上述技术方案,本发明实施例中的力量训练器及其力量训练方法,通过盘式伺服电机的应用以及传动机构的整体结构设置,能够解决现有力量型训练器材仅能单方向出力进行训练的问题,实现上推及下拉的双方向力量训练;通过多种训练模式及训练数据的设置,能够满足不同力量人群的不同训练需求,从而提高力量训练的安全性。
技术特征:
1.一种力量训练器,其特征在于,包括:
2.根据权利要求1所述的力量训练器,其特征在于,所述力量训练器还包括安装于机架上的电容模块和泄放电阻;所述电容模块的输入端与外部电源连接,输出端与驱动器连接,所述电容模块用于为驱动器提供电力供应;所述泄放电阻与驱动器连接,用于释放力量训练时产生的多余电能。
3.根据权利要求2所述的力量训练器,其特征在于,所述传动机构还包括导轨,所述导轨布设于传输件远离机架的外侧,且其长度方向平行于该侧传输件的传输方向;所述导轨的两端分别与机架连接,所述定位件的一端连接于传输件上,另一端与所述导轨滑动连接。
4.根据权利要求3所述的力量训练器,其特征在于,所述力量训练器还限位装置,所述限位装置包括设置于机架上的上限位件和下限位件;所述下限位件用于对推拉臂最下位置进行限定,当所述推拉臂到达最下位置时,所述定位件滑动至导轨下端;所述上限位件用于对推拉臂的最上位置进行限定,当所述推拉臂到达最上位置时,所述定位件滑动至导轨上端。
5.根据权利要求2所述的力量训练器,其特征在于,所述传动机构还包括主动轮,所述主动轮套接于转子的外部;所述传输件包绕在主动轮和从动轮上;所述传输件为同步带,所述主动轮和从动轮上均设有适配同步带的齿槽结构。
6.一种力量训练方法,其特征在于,基于如权利要求2-5中任一项所述的力量训练器进行,包括如下步骤:
7.根据权利要求6所述的力量训练方法,其特征在于,训练者在主动对抗模式下进行力量训练时,
8.根据权利要求6所述的力量训练方法,其特征在于,训练者在被动推拉模式下进行力量训练时,
9.根据权利要求7或8所述的力量训练方法,其特征在于,所述训练数据还包括步进扭矩、最快理想心率、最慢理想心率;
10.根据权利要求6所述的力量训练方法,其特征在于,训练者在等速模式下进行力量训练时,
技术总结
本发明属于健身器技术领域,涉及一种力量训练器及其力量训练方法。该力量训练器包括机架、推拉臂、传动机构、驱动器及人机交互装置;推拉臂一端转动连接于机架顶部;传动机构中的从动轮和盘式伺服电机分别连接于机架上,盘式伺服电机包括定子、套设于定子外的转子以及保持制动器,传输件包绕在转子和从动轮上,其远离机架的外侧连接有定位件,连杆一端与推拉臂转动连接,另一端与定位件转动连接;驱动器与盘式伺服电机电连接以控制其正转、反转或停转锁定;人机交互装置与驱动器通信连接,以使驱动器根据训练模式来控制盘式伺服电机的转动。本发明解决了现有力量型训练器材仅能单方向出力进行训练的问题,能够实现双方向的力量训练。
技术研发人员:朱希龙,郑国良,梁海龙
受保护的技术使用者:青岛三柏硕健康科技股份有限公司
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!