一种运动设备控制方法与流程
本发明涉及设备控制方法领域,具体是一种运动设备控制方法。
背景技术:
1、近年来,随着科技的发展,特别是移动互联网、物联网和人工智能技术的快速进步,健身行业也正在经历一场数字化转型。在这个转型中,健身设备不再仅仅是一种简单的力量或者有氧训练工具,而正在变成可以收集用户健康数据、提供个性化训练建议和实时反馈的智能设备。
2、而随着有氧训练设备的转型,人们为有氧训练设备赋予了更多的功能,例如开关、加速减速、角度调整、音乐或者视频播放,但这些功能在使用时需要用户充分解放双手自行设置,这一过程不仅影响用户的训练效果,还容易导致意外的发生,为此,如何通过手势即可快速准确的控制有氧训练设备的各项功能成为了目前急需解决的难题。
3、因此,本领域技术人员提供了一种运动设备控制方法,以解决上述背景技术中提出的问题。
技术实现思路
1、本发明的目的在于提供一种运动设备控制方法,能够通过用户手势来快速准确的控制有氧训练设备的各项功能,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种运动设备控制方法,包括以下步骤:
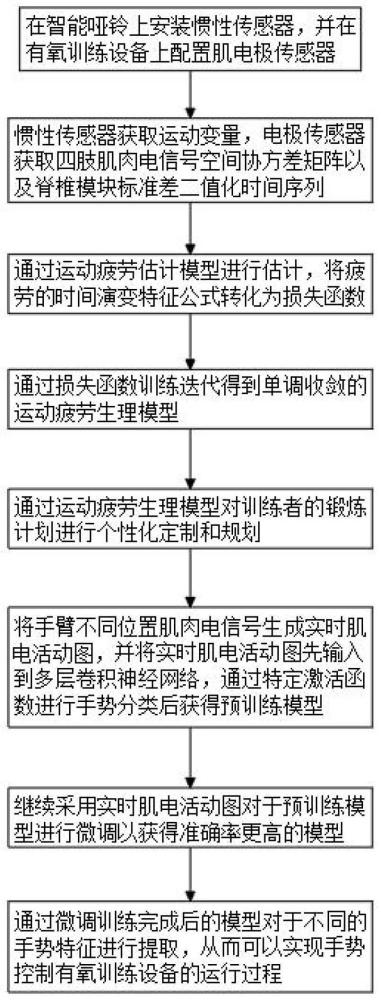
4、在智能哑铃上安装惯性传感器,并在有氧训练设备上配置肌电极传感器;
5、惯性传感器获取运动变量,电极传感器获取四肢肌肉电信号空间协方差矩阵以及脊椎模块标准差二值化时间序列;
6、通过运动疲劳估计模型进行估计,将疲劳的时间演变特征公式转化为损失函数;
7、通过损失函数训练迭代得到单调收敛的运动疲劳生理模型;
8、通过运动疲劳生理模型对训练者的锻炼计划进行个性化定制和规划;
9、将手臂不同位置肌肉电信号生成实时肌电活动图,并将实时肌电活动图先输入到多层卷积神经网络,通过特定激活函数进行手势分类后获得预训练模型;
10、继续采用实时肌电活动图对于预训练模型进行微调以获得准确率更高的模型;
11、通过微调训练完成后的模型对于不同的手势特征进行提取,从而可以实现手势控制有氧训练设备的运行过程。
12、作为本发明进一步的方案:所述损失函数的具体生成过程为:通过贝叶斯高斯过程结合运动变量、四肢肌肉电信号空间协方差矩阵以及脊椎模块标准差二值化时间序列变量对于运动疲劳估计模型进行估计,即根据对取四肢肌肉电信号空间协方差矩阵和脊柱模块激活的观察结果来估算每个时间点的疲劳程度,并在新的观察结果出现时更新估计值,运动疲劳估计模型再通过数学将疲劳的时间演变特征公式转化为损失函数。
13、作为本发明再进一步的方案:所述有氧训练设备的运行过程包括开关、加速减速、角度调整、音乐或者视频播放。
14、作为本发明再进一步的方案:所述智能哑铃可通过蓝牙与用户的手机端app连接,且智能哑铃内部安装有第一传感器组件用以捕获用户的运动信息,用户可在手机端app设定训练日期、哑铃重量、运动时长、哑铃运动次数的参数,参数设定好之后,手机端app会根据用户运动的实时数据进行计时和计数,并根据预设的训练时长和训练次数进行提醒,如果用户完成预设的训练后仍继续运动,手机端app会持续计时和计数。
15、作为本发明再进一步的方案:所述第一传感器组件包括压力传感器、加速度传感器、陀螺仪。
16、作为本发明再进一步的方案:所述有氧训练设备上还配备了第二传感器组件,用于收集上肢和下肢的运动数据,运动数据包括运动速度、运动距离、运动角度,在数据被收集后,有氧训练设备将对数据进行处理得到上肢和下肢的运动参数,并提供给有氧训练设备的中央处理器,中央处理器根据上肢和下肢的运动参数计算四肢联动的运动指数,并将计算出的四肢联动的运动指数发送到有氧训练设备自带的显示屏上显示出来。
17、作为本发明再进一步的方案:所述四肢联动运动指数=α*上肢运动参数+β*下肢运动参数,其中,α与β是权重系数,可根据实际需要进行调整。
18、作为本发明再进一步的方案:所述第二传感器组件包括加速度传感器、距离传感器、陀螺仪。
19、与现有技术相比,本发明的有益效果是:
20、本申请不仅能够对训练者的锻炼计划进行个性化定制和规划,进一步提高用户的训练效果,还能够通过用户手势来快速准确的控制有氧训练设备的各项功能,提高用户的使用体验。
技术特征:
1.一种运动设备控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种运动设备控制方法,其特征在于,所述损失函数的具体生成过程为:通过贝叶斯高斯过程结合运动变量、四肢肌肉电信号空间协方差矩阵以及脊椎模块标准差二值化时间序列变量对于运动疲劳估计模型进行估计,即根据对取四肢肌肉电信号空间协方差矩阵和脊柱模块激活的观察结果来估算每个时间点的疲劳程度,并在新的观察结果出现时更新估计值,运动疲劳估计模型再通过数学将疲劳的时间演变特征公式转化为损失函数。
3.根据权利要求1或2所述的一种运动设备控制方法,其特征在于,所述有氧训练设备的运行过程包括开关、加速减速、角度调整、音乐或者视频播放。
4.根据权利要求1所述的一种运动设备控制方法,其特征在于,所述智能哑铃可通过蓝牙与用户的手机端app连接,且智能哑铃内部安装有第一传感器组件用以捕获用户的运动信息,用户可在手机端app设定训练日期、哑铃重量、运动时长、哑铃运动次数的参数,参数设定好之后,手机端app会根据用户运动的实时数据进行计时和计数,并根据预设的训练时长和训练次数进行提醒,如果用户完成预设的训练后仍继续运动,手机端app会持续计时和计数。
5.根据权利要求4所述的一种运动设备控制方法,其特征在于,所述第一传感器组件包括压力传感器、加速度传感器、陀螺仪。
6.根据权利要求1所述的一种运动设备控制方法,其特征在于,所述有氧训练设备上还配备了第二传感器组件,用于收集上肢和下肢的运动数据,运动数据包括运动速度、运动距离、运动角度,在数据被收集后,有氧训练设备将对数据进行处理得到上肢和下肢的运动参数,并提供给有氧训练设备的中央处理器,中央处理器根据上肢和下肢的运动参数计算四肢联动的运动指数,并将计算出的四肢联动的运动指数发送到有氧训练设备自带的显示屏上显示出来。
7.根据权利要求6所述的一种运动设备控制方法,其特征在于,所述四肢联动运动指数=α*上肢运动参数+β*下肢运动参数,其中,α与β是权重系数,可根据实际需要进行调整。
8.根据权利要求6所述的一种运动设备控制方法,其特征在于,所述第二传感器组件包括加速度传感器、距离传感器、陀螺仪。
技术总结
本发明公开了一种运动设备控制方法,属于设备控制方法领域,包括以下步骤:在智能哑铃上安装惯性传感器,并在有氧训练设备上配置肌电极传感器;惯性传感器获取运动变量,电极传感器获取四肢肌肉电信号空间协方差矩阵以及脊椎模块标准差二值化时间序列;获取损失函数;通过损失函数训练迭代得到单调收敛的运动疲劳生理模型;通过运动疲劳生理模型对训练者的锻炼计划进行个性化定制和规划;获得预训练模型;对于预训练模型进行微调以获得准确率更高的模型;通过微调训练完成后的模型对于不同的手势特征进行提取,从而可以实现手势控制有氧训练设备的运行过程。本发明,能够通过用户手势来快速准确的控制有氧训练设备的各项功能。
技术研发人员:刘金印
受保护的技术使用者:深圳市美林医疗科技有限公司
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!