一种多功能行走结构的制作方法
本技术涉及玩具制造领域,特别涉及一种多功能行走结构。
背景技术:
1、随着生活水平的提高和科技的进步,目前的各类儿童玩具大都采用仿真手段制作而成,如玩具飞机、玩具汽车等等,这些玩具在大体形状、结构和局部细节上与现实生活中的真品都很相似,可培养儿童的识物能力,有利于幼儿早期智力的开发。在这些仿真玩具中,动物仿真玩具占了相当一部分比例,这些动物仿真玩具一般采用电力驱动,打开开关后即可在地上行走并发出声响。但是,几乎所有的动物仿真玩具只有行走这一种运动模式,玩法单一,互动性不强,其可玩性和趣味性不高,容易使幼儿产生枯燥乏味的感觉,难以满足幼儿的玩耍需求。
技术实现思路
1、本实用新型的主要目的在于提供一种多功能行走结构,可以有效解决背景技术中的问题。
2、为实现上述目的,本实用新型采取的技术方案为:一种多功能行走结构,包括体壳,所述体壳内固定有机架,所述机架上连接有四肢驱动机构、头壳驱动机构、摇尾驱动机构以及向上述三种机构提供动力的动力机构,所述四肢驱动机构、头壳驱动机构以及摇尾驱动机构均有部分位于体壳外侧并分别连接有四肢、头壳以及尾部,其中四肢驱动机构由坐姿组件、抬腿组件以及行走组件构成。
3、进一步地,所述动力机构包括第一动力机构和第二动力机构,所述摇尾驱动机构、坐姿组件以及抬腿组件均由第一动力机构进行驱动,所述头壳驱动机构以及行走组件均由第二动力机构进行驱动。
4、进一步地,所述第一动力机构包括第一电机,所述第一电机转轴上同轴固定有第一皮带主动轮,所述第一皮带主动轮通过皮带传动连接有第一皮带从动轮,所述第一皮带从动轮上同轴固定有第一转轴,所述第一转轴上设有第一惯性摆块,所述第一转轴可转动地穿过第一惯性摆块后同轴固定有第一传动齿轮,所述第一惯性摆块末端转动连接有第一摆齿,所述第一摆齿与第一传动齿轮之间彼此啮合,所述第一摆齿两旁分别设有第一减速齿轮组和第二减速齿轮组,所述第一摆齿可随着第一电机的旋转方向与第一减速齿轮组或第二减速齿轮组进行啮合。
5、进一步地,所述摇尾驱动机构包括第一减速齿轮组,所述第一减速齿轮组啮合有摇尾驱动齿轮,所述摇尾驱动齿轮上同轴固定有方轴,方轴另一端固定有短曲柄,所述短曲柄另一端转动连接有摇尾拉杆,所述摇尾拉杆顶端膨大为套环,所述套环套设有摇尾压杆,所述摇尾压杆一端设有防套环脱落凸起,另一端则垂直固定有水平摇尾转杆,所述摇尾转杆转动连接在机架上,所述摇尾转杆末端连接有尾部。
6、进一步地,所述坐姿组件包括坐姿驱动齿轮,所述坐姿驱动齿轮同样与第一减速齿轮组彼此啮合,所述坐姿驱动齿轮上同轴固定有方轴,方轴两端同轴固定有坐姿偏心轮,所述坐姿偏心轮外侧面上固定有圆柱,圆柱上转动连接有坐姿推拉杆,所述坐姿推拉杆另一端转动连接有坐姿曲柄连杆,所述坐姿曲柄连杆两端均转动连接有坐姿曲柄,所述坐姿曲柄另一端固定在四肢中的后腿顶部内侧;其中,所述坐姿推拉杆可以将坐姿传动轮的旋转运动转化为坐姿曲柄连杆的前后运动。
7、进一步地,所述抬腿组件包括与第二减速齿轮组彼此啮合的抬腿驱动齿轮,所述抬腿驱动齿轮连接有传动偏心轮,所述传动偏心轮外侧面上设有偏心圆柱,偏心圆柱上转动连接有抬腿推拉杆,所述抬腿推拉杆另一端转动连接有抬腿曲柄,所述抬腿曲柄另一端固定在四肢中的进一步地,所述第二动力机构包括第二电机,所述第二电机转轴上同轴固定有第二皮带主动轮,所述第二皮带主动轮通过皮带传动连接有第二皮带从动轮,所述第二皮带从动轮上同轴固定有第二转轴,所述第二转轴上设有第二惯性摆块,所述第二转轴可转动地穿过第二惯性摆块后同轴固定有第二传动齿轮,所述第二惯性摆块末端转动连接有第二摆齿,所述第二摆齿与第二传动齿轮之间彼此啮合,所述第二摆齿两旁分别设有第三减速齿轮组和第四减速齿轮组,所述第二摆齿可随着第二电机的旋转方向与第三减速齿轮组或第四减速齿轮组进行啮合。
8、进一步地,所述行走组件包括与第三减速齿轮组啮合的行走传动齿轮,所述行走传动齿轮上同轴固定有方轴,方轴两端均由内向外依次固定有后腿拉杆偏心轮和前腿偏心轮,所述后腿拉杆偏心轮上转动连接有后腿拉杆,所述后腿拉杆的一端转动套设在后腿拉杆偏心轮上,另一端固定在四肢中的后腿顶端内侧,所述前腿偏心轮外侧面上固定有偏心圆柱,偏心圆柱与四肢中的前腿顶端内侧转动连接。
9、进一步地,所述头壳驱动机构包括与第四减速齿轮组啮合的头壳驱动齿轮,所述头壳驱动齿轮同轴固定有方轴,方轴两侧分别固定有第一头壳驱动偏心轮和第二头壳驱动偏心轮,且第一头壳驱动偏心轮和第二头壳驱动偏心轮的外侧面上均固定有偏心圆柱,所述第一头壳驱动偏心轮上转动连接有头壳支撑中杆,所述头壳支撑中杆一端套设在第一头壳驱动偏心轮上,另一端转动连接在头壳底部,所述头壳支撑中杆上还设有滑槽,所述滑槽中上下滑动有第一控舌拉杆,所述第一控舌拉杆底部设有凸起圆柱,凸起圆柱上转动套设有控舌传动杆,所述控舌传动杆另一端转动套设在第一头壳驱动偏心轮的偏心圆柱上,所述第一控舌拉杆顶部设有凸起圆柱,凸起圆柱上连接有l型传动架,所述l型传动架的一角朝向头壳嘴部并铰接在头壳上,且其短臂上开设有向铰接点下倾的倾斜滑槽,所述第一控舌拉杆顶部的凸起圆柱滑动于倾斜滑槽中,所述l型传动架的长臂顶端转动连接有第二控舌拉杆,所述第二控舌拉杆另一端转动连接有舌头主体,所述舌头主体底部开设有限位横槽,所述限位横槽中滑动有限位杆,所述限位杆两端固定在头壳中;所述第二头壳驱动偏心轮的偏心圆柱上转动连接有头壳支撑传动杆,所述头壳支撑传动杆顶端转动连接有头壳支撑左侧杆,所述头壳支撑左侧杆另一端转动连接在头壳底部,所述头壳底部还转动连接有头壳支撑右侧杆,所述头壳支撑右侧杆底部转动连接在机架上。
10、与现有技术相比,本实用新型具有如下有益效果:
11、本实用新型中,除了常规动物仿真玩具所标配的行走组件外,还设有
12、四肢驱动机构、头壳驱动机构、摇尾驱动机构,四肢驱动机构由坐姿组件、抬腿组件以及行走组件构成,其中坐姿组件能够让玩具模拟宠物坐下的姿势,抬腿组件能够模拟宠物抬放前腿的姿势,头壳驱动机构则能够让玩具模拟宠物抬头吐舌的姿势,摇尾驱动机构则能够模拟宠物的摇尾动作。上述动作综合起来,能够让玩具更加接近现实中的宠物形象,加强玩具的仿真效果,提高玩具的可玩性和趣味性,满足幼儿的玩耍需求。
技术特征:
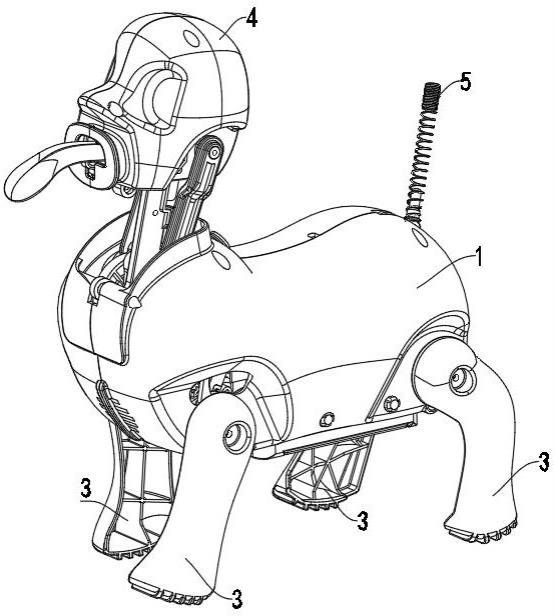
1.一种多功能行走结构,其特征在于:包括体壳(1),所述体壳(1)内固定有机架(2),所述机架(2)上连接有四肢驱动机构、头壳驱动机构、摇尾驱动机构以及向上述三种机构提供动力的动力机构,所述四肢驱动机构、头壳驱动机构以及摇尾驱动机构均有部分位于体壳(1)外侧并分别连接有四肢(3)、头壳(4)以及尾部(5),其中四肢驱动机构由坐姿组件、抬腿组件以及行走组件构成。
2.根据权利要求1所述的一种多功能行走结构,其特征在于:所述动力机构包括第一动力机构和第二动力机构,所述摇尾驱动机构、坐姿组件以及抬腿组件均由第一动力机构进行驱动,所述头壳驱动机构以及行走组件均由第二动力机构进行驱动。
3.根据权利要求2所述的一种多功能行走结构,其特征在于:所述第一动力机构包括第一电机(6),所述第一电机(6)转轴上同轴固定有第一皮带主动轮(7),所述第一皮带主动轮(7)通过皮带传动连接有第一皮带从动轮(8),所述第一皮带从动轮(8)上同轴固定有第一转轴,所述第一转轴上设有第一惯性摆块(9),所述第一转轴可转动地穿过第一惯性摆块(9)后同轴固定有第一传动齿轮(10),所述第一惯性摆块(9)末端转动连接有第一摆齿(11),所述第一摆齿(11)与第一传动齿轮(10)之间彼此啮合,所述第一摆齿(11)两旁分别设有第一减速齿轮组(12)和第二减速齿轮组(13),所述第一摆齿(11)可随着第一电机(6)的旋转方向与第一减速齿轮组(12)或第二减速齿轮组(13)进行啮合。
4.根据权利要求3所述的一种多功能行走结构,其特征在于:所述摇尾驱动机构包括第一减速齿轮组(12),所述第一减速齿轮组(12)啮合有摇尾驱动齿轮(14),所述摇尾驱动齿轮(14)上同轴固定有方轴,方轴另一端固定有短曲柄(15),所述短曲柄(15)另一端转动连接有摇尾拉杆(16),所述摇尾拉杆(16)顶端膨大为套环,所述套环套设有摇尾压杆(17),所述摇尾压杆(17)一端设有防套环脱落凸起,另一端则垂直固定有水平摇尾转杆(18),所述摇尾转杆(18)转动连接在机架(2)上,所述摇尾转杆(18)末端连接有尾部(5)。
5.根据权利要求4所述的一种多功能行走结构,其特征在于:所述坐姿组件包括坐姿驱动齿轮(19),所述坐姿驱动齿轮(19)同样与第一减速齿轮组(12)彼此啮合,所述坐姿驱动齿轮(19)上同轴固定有方轴,方轴两端同轴固定有坐姿偏心轮(20),所述坐姿偏心轮(20)外侧面上固定有圆柱,圆柱上转动连接有坐姿推拉杆(21),所述坐姿推拉杆(21)另一端转动连接有坐姿曲柄连杆(22),所述坐姿曲柄连杆(22)两端均转动连接有坐姿曲柄(23),所述坐姿曲柄(23)另一端固定在四肢(3)中的后腿顶部内侧;其中,所述坐姿推拉杆(21)可以将坐姿传动轮的旋转运动转化为坐姿曲柄连杆(22)的前后运动。
6.根据权利要求3所述的一种多功能行走结构,其特征在于:所述抬腿组件包括与第二减速齿轮组(13)彼此啮合的抬腿驱动齿轮(24),所述抬腿驱动齿轮(24)连接有传动偏心轮(25),所述传动偏心轮(25)外侧面上设有偏心圆柱,偏心圆柱上转动连接有抬腿推拉杆(26),所述抬腿推拉杆(26)另一端转动连接有抬腿曲柄(27),所述抬腿曲柄(27)另一端固定在四肢(3)中的任一前腿顶部内侧。
7.根据权利要求2所述的一种多功能行走结构,其特征在于:所述第二动力机构包括第二电机(28),所述第二电机(28)转轴上同轴固定有第二皮带主动轮(29),所述第二皮带主动轮(29)通过皮带传动连接有第二皮带从动轮(30),所述第二皮带从动轮(30)上同轴固定有第二转轴,所述第二转轴上设有第二惯性摆块(31),所述第二转轴可转动地穿过第二惯性摆块(31)后同轴固定有第二传动齿轮(32),所述第二惯性摆块(31)末端转动连接有第二摆齿(33),所述第二摆齿(33)与第二传动齿轮(32)之间彼此啮合,所述第二摆齿(33)两旁分别设有第三减速齿轮组(34)和第四减速齿轮组(35),所述第二摆齿(33)可随着第二电机(28)的旋转方向与第三减速齿轮组(34)或第四减速齿轮组(35)进行啮合。
8.根据权利要求7所述的一种多功能行走结构,其特征在于:所述行走组件包括与第三减速齿轮组(34)啮合的行走传动齿轮(36),所述行走传动齿轮(36)上同轴固定有方轴,方轴两端均由内向外依次固定有后腿拉杆偏心轮(37)和前腿偏心轮(38),所述后腿拉杆偏心轮(37)上转动连接有后腿拉杆(39),所述后腿拉杆(39)的一端转动套设在后腿拉杆偏心轮(37)上,另一端固定在四肢(3)中的后腿顶端内侧,所述前腿偏心轮(38)外侧面上固定有偏心圆柱,偏心圆柱与四肢(3)中的前腿顶端内侧转动连接。
9.根据权利要求7所述的一种多功能行走结构,其特征在于:所述头壳驱动机构包括与第四减速齿轮组(35)啮合的头壳驱动齿轮(40),所述头壳驱动齿轮(40)同轴固定有方轴,方轴两侧分别固定有第一头壳驱动偏心轮(41)和第二头壳驱动偏心轮(42),且第一头壳驱动偏心轮(41)和第二头壳驱动偏心轮(42)的外侧面上均固定有偏心圆柱,所述第一头壳驱动偏心轮(41)上转动连接有头壳支撑中杆(43),所述头壳支撑中杆(43)一端套设在第一头壳驱动偏心轮(41)上,另一端转动连接在头壳(4)底部,所述头壳支撑中杆(43)上还设有滑槽,所述滑槽中上下滑动有第一控舌拉杆(44),所述第一控舌拉杆(44)底部设有凸起圆柱,凸起圆柱上转动套设有控舌传动杆(45),所述控舌传动杆(45)另一端转动套设在第一头壳驱动偏心轮(41)的偏心圆柱上,所述第一控舌拉杆(44)顶部设有凸起圆柱,凸起圆柱上连接有l型传动架(46),所述l型传动架(46)的一角朝向头壳(4)嘴部并铰接在头壳(4)上,且其短臂上开设有向铰接点下倾的倾斜滑槽,所述第一控舌拉杆(44)顶部的凸起圆柱滑动于倾斜滑槽中,所述l型传动架(46)的长臂顶端转动连接有第二控舌拉杆(47),所述第二控舌拉杆(47)另一端转动连接有舌头主体(48),所述舌头主体(48)底部开设有限位横槽,所述限位横槽中滑动有限位杆(49),所述限位杆(49)两端固定在头壳(4)中;所述第二头壳驱动偏心轮(42)的偏心圆柱上转动连接有头壳支撑传动杆(50),所述头壳支撑传动杆(50)顶端转动连接有头壳支撑左侧杆(51),所述头壳支撑左侧杆(51)另一端转动连接在头壳(4)底部,所述头壳(4)底部还转动连接有头壳支撑右侧杆(52),所述头壳支撑右侧杆(52)底部转动连接在机架(2)上。
技术总结
本技术公开了一种多功能行走结构,包括体壳,体壳内固定有机架,机架上连接有四肢驱动机构、头壳驱动机构、摇尾驱动机构以及向上述三种机构提供动力的动力机构,四肢驱动机构、头壳驱动机构以及摇尾驱动机构均有部分位于体壳外侧并分别连接有四肢、头壳以及尾部,其中四肢驱动机构由坐姿组件、抬腿组件以及行走组件构成。本技术中,除了常规动物仿真玩具所标配的行走组件外,还设有四肢驱动机构、头壳驱动机构、摇尾驱动机构,四肢驱动机构由坐姿组件、抬腿组件以及行走组件构成,上述动作综合起来,能够让玩具更加接近现实中的宠物形象,加强玩具的仿真效果,提高玩具的可玩性和趣味性,满足幼儿的玩耍需求。
技术研发人员:赵天明,窦修兵,张命君,崔家宝,李向阳,夏九海,黄璐长,张胜南,何佳茂,陈乙芬
受保护的技术使用者:华芯电子科技(江苏)有限公司
技术研发日:20230224
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!