一种下肢康复训练机器人的制作方法
本技术涉及康复训练设备。
背景技术:
1、下肢康复机器人近年来在康复设备领域应用越来越广泛,它通过机械结构与患者下肢绑定,通过模拟正常人的步行运动,达到锻炼下肢肌肉,恢复神经机能的目的。
2、根据公开号cn214968606u专利名为一种下肢康复训练机器人,该专利的效果是背带组件的两组肩带和调节带构成主要的承重组件,通过两组肩带上的锁扣将康复人员上半身的重量传递给吊架,而腰带和两组腿部固定带作为辅助固定组件,确保康复人员的体态稳定,但是,由于一些患者步进下肢受损,而且腰部也有一定损伤,不能长时间站立,需要躺在床上来缓解腰部的酸痛,导致该装置不能方便患者以平躺姿势锻炼下肢。
技术实现思路
1、本实用新型的目的在于克服不能身躯平躺锻炼下肢的缺陷而提供的一种下肢康复训练机器人。
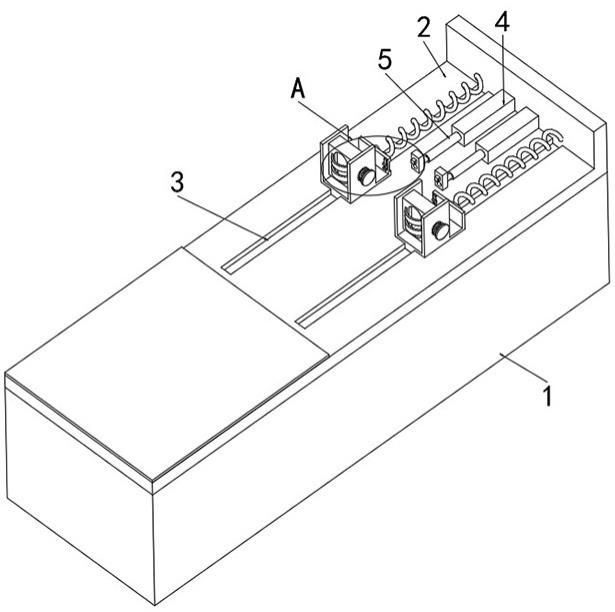
2、实现上述目的的技术方案是:一种下肢康复训练机器人,包括机器人主体,所述机器人主体的上端连接有顶板,所述顶板的上端开设有两个滑槽,所述滑槽的内壁滑动连接有支撑框架,所述支撑框架的外壁连接有弹簧,所述弹簧的一端与顶板连接,所述支撑框架的外壁转动连接有转轴,所述转轴的两端均设置有扭簧,所述转轴的外壁连接有脚踏板,所述脚踏板的外壁设置有固定件,所述顶板的外壁连接有两个推杆电机,所述推杆电机的输出端连接有伸缩杆,所述伸缩杆的外壁转动连接有限位块,所述限位块的外壁开设有过孔,所述支撑框架的外壁开设有插孔,所述支撑框架的外壁设置有限位件。
3、优选的,所述固定件设置为束缚带。
4、优选的,所述限位件包括插板和限位孔,所述支撑框架的外壁滑动连接有插板,所述支撑框架的外表面设置有限位孔。
5、优选的,所述限位孔位于插孔的下方。
6、优选的,所述顶板的上端连接有海绵垫。
7、优选的,所述脚踏板的侧壁开设有放置槽。
8、本实用新型的有益效果是:患者做弯腿和伸腿动作时,脚部会拉动脚踏板,脚踏板会通过转轴拉动支撑框架,支撑框架拉动弹簧,利用弹簧的弹力来对患者设置康复训练强度,患者如果需要提高或者降低康复训练强度,只需要降低对弹簧的拉伸或者压缩长度,可以降低弹簧的弹力,从而降低训练强度,并且由于脚踏板可以通过转轴转动,转轴会带动扭簧的运动,使腿部弯曲时,脚部也可以跟随腿部转动,避免脚部的不适应,当患者不能自主拉动脚踏板时,可以转动限位块,使限位块插入到插孔内,再将插板插入到过孔内,并将插板插入到限位孔内,从而使伸缩杆和支撑框架连为一体,启动推杆电机,推杆电机带动伸缩杆移动,伸缩杆通过限位块带动支撑框架移动,从而带动患者脚部的移动,实现了患者平躺姿态训练的效果,并且可以便捷的调节训练强度。
技术特征:
1.一种下肢康复训练机器人,包括机器人主体(1),其特征在于,所述机器人主体(1)的上端连接有顶板(2),所述顶板(2)的上端开设有两个滑槽(3),所述滑槽(3)的内壁滑动连接有支撑框架(8),所述支撑框架(8)的外壁连接有弹簧(7),所述弹簧(7)的一端与顶板(2)连接,所述支撑框架(8)的外壁转动连接有转轴(12),所述转轴(12)的两端均设置有扭簧(13),所述转轴(12)的外壁连接有脚踏板(14),所述脚踏板(14)的外壁设置有固定件(15),所述顶板(2)的外壁连接有两个推杆电机(4),所述推杆电机(4)的输出端连接有伸缩杆(5),所述伸缩杆(5)的外壁转动连接有限位块(6),所述限位块(6)的外壁开设有过孔(16),所述支撑框架(8)的外壁开设有插孔(9),所述支撑框架(8)的外壁设置有限位件。
2.根据权利要求1所述的一种下肢康复训练机器人,其特征在于,所述固定件(15)设置为束缚带。
3.根据权利要求1所述的一种下肢康复训练机器人,其特征在于,所述限位件包括插板(10)和限位孔(11),所述支撑框架(8)的外壁滑动连接有插板(10),所述支撑框架(8)的外表面设置有限位孔(11)。
4.根据权利要求3所述的一种下肢康复训练机器人,其特征在于,所述限位孔(11)位于插孔(9)的下方。
5.根据权利要求1所述的一种下肢康复训练机器人,其特征在于,所述顶板(2)的上端连接有海绵垫。
6.根据权利要求1所述的一种下肢康复训练机器人,其特征在于,所述脚踏板(14)的侧壁开设有放置槽。
技术总结
本技术公开了一种下肢康复训练机器人,包括机器人主体,所述机器人主体的上端连接有顶板,所述顶板的上端开设有两个滑槽,所述滑槽的内壁滑动连接有支撑框架,所述支撑框架的外壁连接有弹簧,所述弹簧的一端与顶板连接,所述支撑框架的外壁转动连接有转轴,所述转轴的两端均设置有扭簧;使限位块插入到插孔内,再将插板插入到过孔内,并将插板插入到限位孔内,从而使伸缩杆和支撑框架连为一体,启动推杆电机,推杆电机带动伸缩杆移动,伸缩杆通过限位块带动支撑框架移动,从而带动患者脚部的移动,实现了患者平躺姿态训练的效果,并且可以便捷的调节训练强度。
技术研发人员:王彦云,刘玉炜,刘涛,李欢,靳铭
受保护的技术使用者:王彦云
技术研发日:20230418
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!