一种行走式积木式机器人的制作方法
本技术涉及积木式机器人,具体涉及一种行走式积木式机器人。
背景技术:
1、现有技术中公开了一种翻转步行积木机器人,其通过一辆小车沿着环形的内侧行驶,使其不断翻转,从而达到机器人翻转行走的功能,该翻转功能同时实现了可翻过障碍物的功能,但是该翻转步行积木机器人的拓展性不强,同时只能翻越有限高度的障碍物,玩法单一。基于此,本实用新型设计了一种行走式积木式机器人以解决上述问题。
技术实现思路
1、针对现有技术所存在的上述缺点,本实用新型提供了一种行走式积木式机器人。
2、为实现以上目的,本实用新型通过以下技术方案予以实现:
3、一种行走式积木式机器人,包括机器人主体,所述机器人主体包括椭圆环形支架和两组支撑组件;所述支撑组件活动连接椭圆环形支架;
4、所述机器人主体上活动安装有驱动车装置;所述驱动车装置包括驱动车和转轮;所述驱动车在椭圆环形支架内侧运动,所述转轮和驱动车转动连接;所述驱动车驱动转轮转动;所述转轮和椭圆环形支架的内壁滚动连接;所述驱动车倒挂于椭圆环形支架上;
5、所述机器人主体和驱动车装置上活动安装有拼接积木组件,其用于机器人主体和驱动车装置拓展功能并使得机器人可以跨越不同高度的障碍物,提升机器人可玩性。
6、更进一步的,所述椭圆环形支架包括第一半椭圆环支架、第二半椭圆环支架、第一拓展柱和第一拓展槽;
7、所述椭圆环形支架由第一半椭圆环支架和第二半椭圆环支架活动拼接而成;所述第一半椭圆环支架和第二半椭圆环支架将椭圆环形支架左右一分为二;所述第一半椭圆环支架的右侧壁上开设有第一拓展槽,所述第二半椭圆环支架的左侧壁上固定安装有第一拓展柱;所述第一拓展柱和第一拓展槽之间插拔连接;所述第一半椭圆环支架和第二半椭圆环支架通过第一拓展柱和第一拓展槽插拔连接。
8、更进一步的,所述拼接积木组件包括增长积木和增重积木;所述增长积木和椭圆环形支架活动连接,其用于椭圆环形支架增加长度;所述增重积木和驱动车装置活动连接,其用于驱动车装置的重量增加。
9、更进一步的,所述增长积木一端侧壁上安装有第三拓展柱,所述增长积木的另一端侧壁上开设有第三拓展槽;所述第三拓展槽插拔连接第一拓展柱和第三拓展柱,所述第三拓展柱插拔连接第一拓展槽。
10、更进一步的,所述增重积木的顶部开设有第四拓展槽,所述增重积木的底部固定安装有第四拓展柱;所述驱动车下表面固定安装有第二拓展柱;所述第四拓展槽插拔连接第二拓展柱和第四拓展柱。
11、更进一步的,所述椭圆环形支架的上下水平内壁上等间距开设有齿轮槽。
12、更进一步的,所述转轮为和齿轮槽配合使用的齿轮。
13、更进一步的,所述支撑组件包括支撑杆、支撑底座、转杆和固定杆;所述支撑杆固定安装于椭圆环形支架的上下内壁之间;所述转杆安装于支撑杆的中间位置并和支撑杆转动连接;所述转杆的两端转动连接有固定杆,所述固定杆的底部固定连接有支撑底座。
14、有益效果
15、当机器人需要跨越障碍时根据不同障碍的高度,使用者在机器人主体和驱动车装置上安装积木组件使机器人可以完成跨越不同高度障碍物,增加了机器人的可玩性。
16、机器人在跨越障碍物时,椭圆环形支架的水平内壁发生大幅倾斜,转轮原本通过和椭圆环形支架的水平内壁的滑动摩擦力带动驱动车运动到椭圆环形支架的左端,但倾斜较大时滑动摩擦力无法满足驱动车爬坡运动,通过在内壁上开设有齿轮槽同时改变转轮为齿轮,依靠齿轮和齿轮槽间支持力从而带动驱动车完成爬坡运动,解决了跨越障碍物时驱动车无法爬坡度较大的问题。
17、本方案让使用者可以结合杠杆原理灵活给机器人安装增长积木和增重积木适应不同障碍物,机器人因此更具可玩性和教育性。
技术特征:
1.一种行走式积木式机器人,包括机器人主体(1),其特征在于:所述机器人主体(1)包括椭圆环形支架(11)和两组支撑组件(12);所述支撑组件(12)活动连接椭圆环形支架(11);
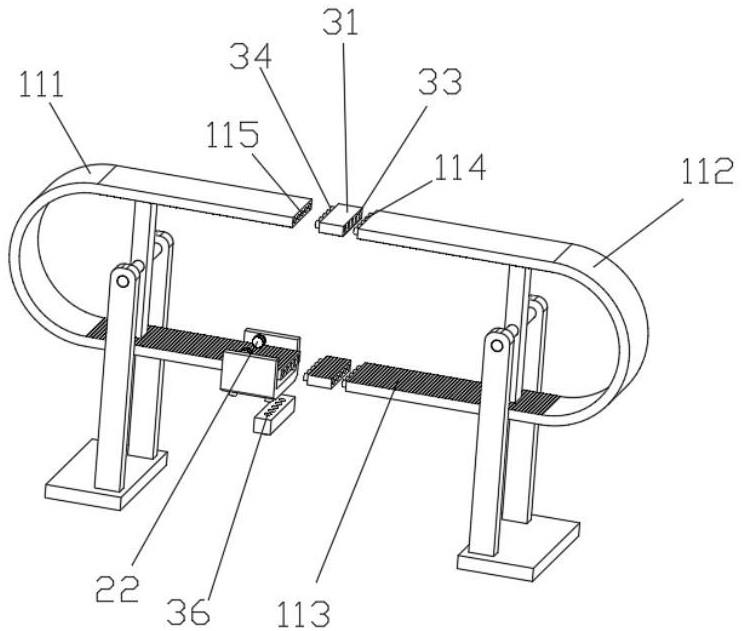
2.根据权利要求1所述的行走式积木式机器人,其特征在于:所述椭圆环形支架(11)包括第一半椭圆环支架(111)、第二半椭圆环支架(112)、第一拓展柱(114)和第一拓展槽(115);
3.根据权利要求2所述的行走式积木式机器人,其特征在于:所述拼接积木组件(3)包括增长积木(31)和增重积木(32);所述增长积木(31)和椭圆环形支架(11)活动连接,其用于椭圆环形支架(11)增加长度;所述增重积木(32)和驱动车装置(2)活动连接,其用于驱动车装置(2)的重量增加。
4.根据权利要求3所述的行走式积木式机器人,其特征在于:所述增长积木(31)一端侧壁上安装有第三拓展柱(33),所述增长积木(31)的另一端侧壁上开设有第三拓展槽(34);所述第三拓展槽(34)插拔连接第一拓展柱(114)和第三拓展柱(33),所述第三拓展柱(33)插拔连接第一拓展槽(115)。
5.根据权利要求3所述的行走式积木式机器人,其特征在于:所述增重积木(32)的顶部开设有第四拓展槽(36),所述增重积木(32)的底部固定安装有第四拓展柱(35);所述驱动车(21)下表面固定安装有第二拓展柱(23);所述第四拓展槽(36)插拔连接第二拓展柱(23)和第四拓展柱(35)。
6.根据权利要求1所述的行走式积木式机器人,其特征在于:所述椭圆环形支架(11)的上下水平内壁上等间距开设有齿轮槽(113)。
7.根据权利要求6所述的行走式积木式机器人,其特征在于:所述转轮(22)为和齿轮槽(113)配合使用的齿轮。
8.根据权利要求1-7任一所述的行走式积木式机器人,其特征在于:所述支撑组件(12)包括支撑杆(121)、支撑底座(122)、转杆(123)和固定杆(124);所述支撑杆(121)固定安装于椭圆环形支架(11)的上下内壁之间;所述转杆(123)安装于支撑杆(121)的中间位置并和支撑杆(121)转动连接;所述转杆(123)的两端转动连接有固定杆(124),所述固定杆(124)的底部固定连接有支撑底座(122)。
技术总结
本技术公开了一种行走式积木式机器人,属于积木机器人领域,包括机器人主体,所述机器人主体包括椭圆环形支架和两组支撑组件;所述支撑组件活动连接椭圆环形支架;所述机器人主体上活动安装有驱动车装置;所述驱动车装置包括驱动车和转轮;所述驱动车在椭圆环形支架内侧运动,所述转轮和驱动车顶部两个延伸台内端转动连接;所述驱动车驱动转轮转动;所述转轮和椭圆环形支架的内壁滚动连接;所述驱动车通过转轮和椭圆环形支架内侧连接倒挂于椭圆环形支架上;所述机器人主体和驱动车装置上活动安装有拼接积木组件。通过上述方式,本技术实现了使用者利用杠杆原理灵活拼接机器人跨越不同障碍物,提升了机器人的可玩性和教育性。
技术研发人员:鲁军
受保护的技术使用者:山西伊泰人工智能科技有限公司
技术研发日:20230529
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!