一种用于木板加工的自动送料三排多轴钻的制作方法
1.本实用新型涉及木板加工技术领域,具体为一种用于木板加工的自动送料三排多轴钻。
背景技术:
2.木板在我们生活中随处可见,人们可根据木板性质特征的不同,可将其进行加工用于不同的场景,而对木板加工的装置多种多样,其中三排多轴钻在木板加工中经常见到,三排多轴钻是一种运用于机械领域钻孔、攻牙、搪孔、铰孔等的孔加工设备,人员可使用三排多轴钻对木板进行钻孔操作,但是一般的三排多轴钻在对木板加工时需要人员进行扶持钻孔操作,增加了人员的劳动负担,不能对木板进行有效的夹持,导致木板出现松动,影响加工精度,为此,我们提出一种用于木板加工的自动送料三排多轴钻来解决这些问题。
技术实现要素:
3.本实用新型要解决的技术问题是克服现有的缺陷,提供一种用于木板加工的自动送料三排多轴钻,实现对木板的高效夹紧,装置在使用时可对不同高度的木板进行夹持,工作时可实现自动送料钻孔,减轻了人员工作负担的情况下也增加了木板的加工效率,可以有效解决背景技术中的问题。
4.为实现上述目的,本实用新型提供如下技术方案:一种用于木板加工的自动送料三排多轴钻,包括工作台、夹持机构和输送机构;
5.工作台:其上表面中部开设有滑口,工作台的上表面前后两端分别设有滑框,两个滑框的滑槽之间滑动连接有放置板,放置板的前后壁面分别开设有安装槽,工作台的下表面四角处均设有支撑腿,四个支撑腿之间设有支撑板,工作台的上表面左侧设有均匀分布的电机,电机的输出轴右端分别设有钻头;
6.夹持机构:滑动连接于安装槽的内部,夹持机构与放置板固定连接;
7.输送机构:包括支架、链轮、链条和连接块,所述支架分别对称设置于工作台的下表面左右两侧,前后对应的两个支架之间分别通过转轴转动连接有链轮,两个链轮之间通过链条传动连接,链条的链体上侧设有连接块,连接块的上端与放置板的下端固定连接。
8.其中:还包括plc控制器,所述plc控制器设置于支撑板的上表面前侧,plc控制器的输入端电连接外部电源,电机的输入端电连接plc控制器的输出端,实现对木板的高效夹紧,装置在使用时可对不同高度的木板进行夹持,实现自动送料钻孔,减轻了人员工作负担的情况下也增加了木板的加工效率。
9.进一步的,还包括光电传感器,所述光电传感器设置于放置板前侧左端的安装孔内部,光电传感器的输出端电连接plc控制器的输入端。
10.进一步的,还包括限位板,所述限位板分别设置于放置板的左侧面前后两端,对木板进行高效限位。
11.进一步的,夹持机构包括l型板、压板和电动推杆,所述l型板分别滑动连接于安装
槽的内部,两个l型板相对内侧面开设的滑动槽内部分别滑动连接有压板,放置板左右两端的开孔内部分别设有电动推杆,电动推杆的伸缩端分别与前后相邻的l型板固定连接,电动推杆的输入端电连接plc控制器的输出端,实现高效夹持。
12.进一步的,所述夹持机构还包括轴承、螺杆和滑槽框,所述滑槽框分别对称设置于放置板的上表面前后两端,左右对应的两个滑槽框之间均滑动连接有滑动块,螺杆分别螺纹连接于滑动块的螺纹孔内部,螺杆的下端端头分别穿过放置板上表面的滑道口并通过轴承与压板的上表面转动连接,实现手动调节。
13.进一步的,所述输送机构还包括第一皮带轮、伺服电机和第二皮带轮,所述第一皮带轮设置于左侧的支架内部转轴前端,支撑板的上表面左侧中部设有伺服电机,伺服电机的输出轴前端设有第二皮带轮,第二皮带轮通过皮带与第一皮带轮传动连接,伺服电机的输入端电连接plc控制器的输出端,实现稳定传动。
14.进一步的,还包括防护壳,所述防护壳通过螺栓固定连接于工作台的左侧面,实现高效保护。
15.与现有技术相比,本实用新型的有益效果是:本用于木板加工的自动送料三排多轴钻,具有以下好处:
16.1、plc控制器调控电动推杆工作,电动推杆的伸缩端推动l型板向滑口的方向滑动,在l型板和压板的配合下对木板进行夹持,人员可以转动螺杆,螺杆在轴承的作用下带动压块上下移动,对l型板和压板之间的高度进行调节,实现对木板的高效夹紧,装置在使用时可对不同高度的木板进行夹持。
17.2、通过plc控制器调控伺服电机工作,伺服电机的输出轴带动第二皮带轮开始转动,第二皮带轮通过皮带带动第一皮带轮转动,第一皮带轮通过转轴带动左侧的链轮转动,左侧的链轮带动通过链条带动右侧的链轮实现同步转动,链条带动连接块在滑块的内部向左滑动,连接块带动放置板在滑框的作用下向左滑动,放置板带动木板与钻头接触并完成钻孔作业,实现自动送料钻孔,减轻了人员工作负担的情况下也增加了木板的加工效率。
附图说明
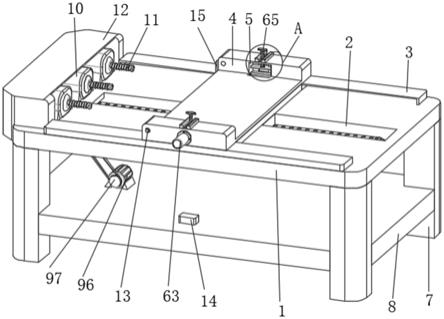
18.图1为本实用新型结构示意图;
19.图2为本实用新型输送机构的结构示意图;
20.图3为本实用新型a处放大结构示意图;
21.图中:1工作台、2滑口、3滑框、4放置板、5安装槽、6夹持机构、61l型板、62压板、63电动推杆、64轴承、65螺杆、66滑槽框、7支撑腿、8支撑板、9输送机构、91支架、92链轮、93链条、94连接块、95第一皮带轮、96伺服电机、97第二皮带轮、10电机、11钻头、12防护壳、13光电传感器、14plc控制器、15限位板。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
23.请参阅图1
‑
3,本实施例提供一种技术方案:一种用于木板加工的自动送料三排多轴钻,包括工作台1、夹持机构6和输送机构9;
24.工作台1:其上表面中部开设有滑口2,滑口2实现输送机构9的滑动作用,工作台1的上表面前后两端分别设有滑框3,滑框3实现放置板4的滑动作用,两个滑框3的滑槽之间滑动连接有放置板4,放置板4实现对木板的放置作用,放置板4的前后壁面分别开设有安装槽5,安装槽5实现夹持机构6的安装场所,工作台1的下表面四角处均设有支撑腿7,支撑腿7实现对工作台1的支撑作用,四个支撑腿7之间设有支撑板8,支撑板8实现对电器件的支撑作用,工作台1的上表面左侧设有均匀分布的电机10,电机10的输出轴右端分别设有钻头11,电机10和钻头11实现木板的钻孔作业;
25.夹持机构6:滑动连接于安装槽5的内部,夹持机构6与放置板4固定连接,夹持机构6包括l型板61、压板62和电动推杆63,l型板61分别滑动连接于安装槽5的内部,两个l型板61相对内侧面开设的滑动槽内部分别滑动连接有压板62,放置板4左右两端的开孔内部分别设有电动推杆63,电动推杆63的伸缩端分别与前后相邻的l型板61固定连接,电动推杆63的输入端电连接plc控制器14的输出端,夹持机构6还包括轴承64、螺杆65和滑槽框66,滑槽框66分别对称设置于放置板4的上表面前后两端,左右对应的两个滑槽框66之间均滑动连接有滑动块,螺杆65分别螺纹连接于滑动块的螺纹孔内部,螺杆65的下端端头分别穿过放置板4上表面的滑道口并通过轴承64与压板62的上表面转动连接,plc控制器14调控电动推杆63工作,电动推杆63的伸缩端推动l型板61向滑口2的方向滑动,在l型板61和压板62的配合下对木板进行夹持,人员可以转动螺杆65,螺杆65在轴承64的作用下带动压块62上下移动,对l型板61和压板62之间的高度进行调节,实现对木板的高效夹紧,装置在使用时可对不同高度的木板进行夹持;
26.输送机构9:包括支架91、链轮92、链条93和连接块94,支架91分别对称设置于工作台1的下表面左右两侧,前后对应的两个支架91之间分别通过转轴转动连接有链轮92,两个链轮92之间通过链条93传动连接,链条93的链体上侧设有连接块94,连接块94的上端与放置板4的下端固定连接,输送机构9还包括第一皮带轮95、伺服电机96和第二皮带轮97,第一皮带轮95设置于左侧的支架91内部转轴前端,支撑板8的上表面左侧中部设有伺服电机96,伺服电机96的输出轴前端设有第二皮带轮97,第二皮带轮97通过皮带与第一皮带轮95传动连接,伺服电机96的输入端电连接plc控制器14的输出端,通过plc控制器14调控伺服电机96工作,伺服电机96的输出轴带动第二皮带轮97开始转动,第二皮带轮97通过皮带带动第一皮带轮95转动,第一皮带轮95通过转轴带动左侧的链轮92转动,左侧的链轮92带动通过链条93带动右侧的链轮92实现同步转动,链条93带动连接块94在滑块2的内部向左滑动,连接块94带动放置板4在滑框3的作用下向左滑动,实现自动送料钻孔,减轻了人员工作负担的情况下也增加了木板的加工效率。
27.其中:还包括plc控制器14,plc控制器14设置于支撑板8的上表面前侧,plc控制器14的输入端电连接外部电源,电机10的输入端电连接plc控制器14的输出端。
28.其中:还包括光电传感器13,光电传感器13设置于放置板4前侧左端的安装孔内部,光电传感器13的输出端电连接plc控制器14的输入端,木板阻挡住了光电传感器13射出的光线,光电传感器13的收光器接收到木板反射回的光线并将阻碍信号呈递给plc控制器14,plc控制器14调控夹持机构6工作。
29.其中:还包括限位板15,限位板15分别设置于放置板4的左侧面前后两端,限位板15对木板的放置位置进行限位。
30.其中:还包括防护壳12,防护壳12通过螺栓固定连接于工作台1的左侧面,防护壳12避免电机10收到外部物体的碰撞。
31.本实用新型提供的一种用于木板加工的自动送料三排多轴钻的工作原理如下:通过控制开关组14调控电机10工作,电机10带动钻头11开始转动,然后人员将木板放置到放置板4的内部,在限位板15的作用下完成放置,这时木板阻挡住了光电传感器13射出的光线,光电传感器13的收光器接收到木板反射回的光线并将阻碍信号呈递给plc控制器14,plc控制器14调控电动推杆63工作,电动推杆63的伸缩端推动l型板61向滑口2的方向滑动,在l型板61和压板62的配合下对木板进行夹持,人员可以转动螺杆65,螺杆65在轴承64的作用下带动压块62上下移动,对l型板61和压板62之间的高度进行调节,木板夹持完成后,通过plc控制器14调控伺服电机96工作,伺服电机96的输出轴带动第二皮带轮97开始转动,第二皮带轮97通过皮带带动第一皮带轮95转动,第一皮带轮95通过转轴带动左侧的链轮92转动,左侧的链轮92带动通过链条93带动右侧的链轮92实现同步转动,链条93带动连接块94在滑块2的内部向左滑动,连接块94带动放置板4在滑框3的作用下向左滑动,放置板4带动木板与钻头11接触并完成钻孔作业,延时一定时间后,plc控制器14调控伺服电机96反转,放置板4向右滑动并回到工作原点,plc控制器14调控电动推杆63工作,电动推杆63的伸缩端带动l型板61和压板62向右滑动并回到工作原点,人员将木板从放置板4的内部拿出。
32.值得注意的是,以上实施例中所公开的,电动推杆63可选用cahb
‑
10
‑
b3a
‑
120230的电动推杆,伺服电机96可选用hf154sc的伺服电机,电机10可选用w20的电机,光电传感器13可选用bt18
‑
d
‑
vn6x/vp6x的漫反射式光电传感器,plc控制器14可选用6es7352
‑
1ah02
‑
0ae0可编程控制器,plc控制器14控制电动推杆63、伺服电机96和电机10工作采用现有技术中常用的方法。
33.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1