用于数控电子锯的夹板机构和数控电子锯的制作方法
本技术涉及电子锯,具体而言涉及用于数控电子锯的夹板机构和数控电子锯。
背景技术:
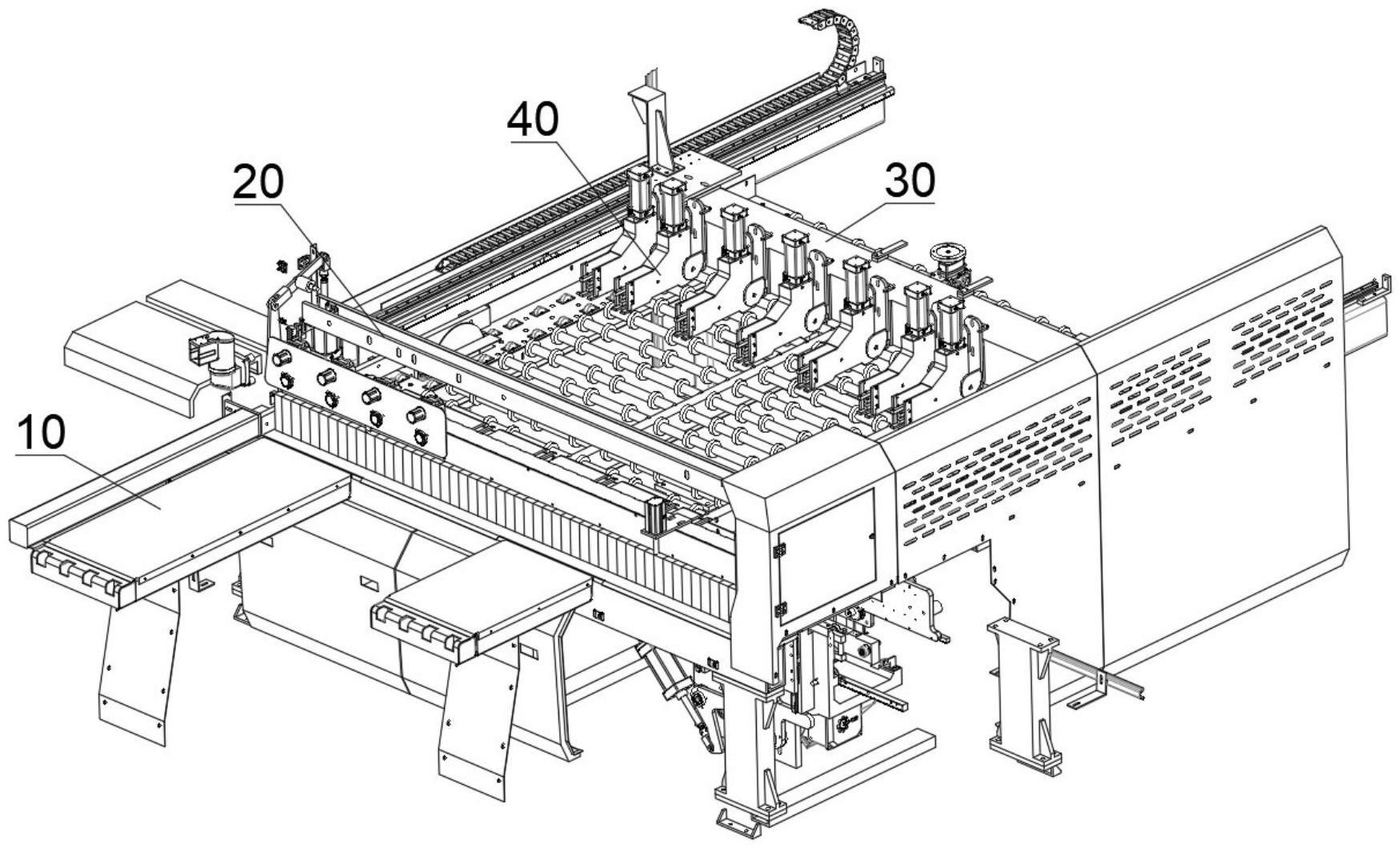
1、数控电子锯一般包括承载台、锯箱、推板部件以及数控系统,锯箱内设置有在轨道上移动的锯车,当板材有承载台输送到锯箱内后,锯车在轨道上移动,使处于锯箱内的板材被裁切,通过推板使板材与锯箱具有不同的相对位置,最终裁切形成不同宽度的板材。
2、例如专利文献1所示的,目前的推板部件通常使用由气缸驱动的夹具,夹持板材的边沿,实现拉板和推板,尤其是在木门门板加工时,板材的表面带有面板层,若板材本身有轻微翘边、弯曲或被锯刀加压时出现翘边,夹具都会对面板层造成划痕,造成门板的外观不良。
3、现有技术文献
4、专利文献1cn212885396u数控电子开板锯设备
技术实现思路
1、本实用新型提出一种用于数控电子锯的夹板机构,包括:
2、夹持部件,所述夹持部件用于夹持待裁切板材,所述夹持部件包括多个独立的夹持单元;
3、驱动部件,所述驱动部件被设置成可以沿待裁切板材送料/推料方向移动;
4、多个枢转结构,每个所述枢转结构设置到所述夹持单元和驱动部件之间;
5、其中,所述夹持单元能相对于所述驱动部件沿x轴向转动,x轴处于水平面内,并垂直于待裁切板材送料/推料的方向。
6、优选的,所述连接部件包括安装板、一对支板和贯穿所述支板的转轴,所述夹持单元设置在一对所述支板之间,并与所述转轴连接,使所述夹持单元绕所述转轴转动,所述转轴的轴线方向为x轴方向。
7、优选的,两个所述支板之间的间距等于所述夹持单元的宽度。
8、优选的,所述夹持单元包括夹爪、气缸和盒体,所述夹爪包括定夹爪和动夹爪,所述定夹爪固定到所述盒体,所述动夹爪与所述盒体铰接,且所述气缸固定到所述盒体,所述气缸的伸缩端连接到所述动夹爪,用于驱动所述动夹爪与所述定夹爪相互靠近或远离,以夹持或释放板材。
9、优选的,所述驱动部件包括横梁、轨道以及驱动电机,所述横梁滑动连接到所述轨道上,所述轨道上设有齿条,所述驱动电机的输出端设有齿轮,所述齿轮与所述齿条啮合连接,使所述横梁在所述轨道上滑动,所述枢转结构连接到所述横梁。
10、本实用新型第二方面提出一种技术方案,一种数控电子锯,包括:
11、承载台;
12、锯箱结构,设有供待裁切板材通过的裁切通道,当待裁切板材通过所述裁切通道时,所述锯箱结构内的锯车可以沿x轴方向裁切板材;
13、上述的夹板机构;
14、其中,所述承载台位于所述锯箱结构的第一侧,所述夹板机构位于所述锯箱结构的第二侧。
15、与现有技术相比,本实用新型的优点在于:
16、本实用新型在夹持部件和驱动夹持部件移动的驱动部件之间设置了枢转结构,使夹持部件和驱动部件处于非刚性连接的状态,如此,当夹持部件所夹持的板材翘起时,夹持部件可发生适应性的位移,避免板材和夹爪之间发生相对移位,可保证板材表面的完整性。
技术特征:
1.一种用于数控电子锯的夹板机构,其特征在于,包括:
2.根据权利要求1所述的用于数控电子锯的夹板机构,其特征在于,所述枢转结构(50)包括安装板(51)、一对支板(52)和贯穿所述支板(52)的转轴(53),所述夹持单元设置在一对所述支板(52)之间,并与所述转轴(53)连接,使所述夹持单元绕所述转轴(53)转动,所述转轴(53)的轴线方向为x轴方向。
3.根据权利要求2所述的用于数控电子锯的夹板机构,其特征在于,两个所述支板(52)之间的间距等于所述夹持单元的宽度。
4.根据权利要求1所述的用于数控电子锯的夹板机构,其特征在于,所述夹持单元包括夹爪(41)、气缸(42)和盒体(43),所述夹爪(41)包括定夹爪(412)和动夹爪(413),所述定夹爪(412)固定到所述盒体(43),所述动夹爪(413)与所述盒体(43)铰接,且所述气缸(42)固定到所述盒体(43),所述气缸(42)的伸缩端连接到所述动夹爪(413),用于驱动所述动夹爪(413)与所述定夹爪(412)相互靠近或远离,以夹持或释放板材。
5.根据权利要求1所述的用于数控电子锯的夹板机构,其特征在于,所述驱动部件(30)包括横梁、轨道以及驱动电机,所述横梁滑动连接到所述轨道(31)上,所述轨道(31)上设有齿条,所述驱动电机的输出端设有齿轮,所述齿轮与所述齿条啮合连接,使所述横梁在所述轨道(31)上滑动,所述枢转结构(50)连接到所述横梁。
6.一种数控电子锯,其特征在于,包括:
技术总结
本技术涉及电子锯技术领域,具体而言涉及用于数控电子锯的夹板机构和数控电子锯,包括:夹持部件,所述夹持部件用于夹持待裁切板材,所述夹持部件包括多个独立的夹持单元;驱动部件,所述驱动部件被设置成可以沿待裁切板材送料/推料方向移动;多个枢转结构,每个所述枢转结构设置到所述夹持单元和驱动部件之间;其中,所述夹持单元能相对于所述驱动部件沿X轴向转动。本技术在夹持部件和驱动夹持部件移动的驱动部件之间设置了枢转结构,使夹持部件和驱动部件处于非刚性连接的状态,如此,当夹持部件所夹持的板材翘起时,夹持部件可发生适应性的位移,避免板材和夹爪之间发生相对移位,可保证板材表面的完整性。
技术研发人员:朱立伟
受保护的技术使用者:徐州工之友数控科技有限公司
技术研发日:20221212
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!