一种用于扫地机器人的多层复合无纺拖布的制作方法
本发明涉及无纺拖布,具体地说是一种用于扫地机器人的多层复合无纺拖布。
背景技术:
1、扫地机器人具有水箱,水箱下面安装有拖布,水箱的水受重力作用流至拖布内部,被润湿的拖布用于清理地上的灰尘等污渍。现有的扫地机器人用拖布基本上分为两种:可重复使用的纱线拖布和一次性使用的无纺拖布。前者在使用后通过再次清洗从而可以循环使用,但存在费时费力、单块布成本高、吸附灰尘不牢固、纳污量低等缺点。后者属于用即弃材料,使用方便快捷,单块布成本低廉,但普遍存在出水效果差问题,包括出水速率过快时导致的地面水痕过多,和出水速率过慢时导致的干拖现象,以及化纤纤维原料导致的润湿不良问题,从而导致扫地机器人的清洁效果不佳。
2、拖布的纳污量受材料蓬松度影响,结实紧密的布料结构不利于存储尘埃等污渍。无纺拖布由于其纤维直接成布的原因,不存在纤维成纱、加捻等步骤,因此其纤维间的距离一般比纱线拖布要大得多,材料因此更加蓬松,纳污量也更大,拖布的单次使用寿命更长。但同时也因为蓬松的结构导致了出水速率过快的问题,且无纺拖布多采用亲水性/吸水性较差的化纤纤维,从而导致水经过纤维时无法发生明显的持液缓流效应,进一步加剧了水箱出水过快问题。
3、纱线拖布一般会配合机器人水箱上的支架一同使用,在使用无纺拖布时,需要移除供纱线拖布使用的支架,因此在设计一次性无纺拖布时,无纺拖布的厚度也需要满足一定要求。增加无纺拖布厚度可以通过增加无纺布的克重与层数实现,但同时也带来了成本增加、超声波难以热粘合、出水速率不稳定等问题。
技术实现思路
1、本发明为克服现有技术的不足,提供一种用于扫地机器人的多层复合无纺拖布,通过设置不同功能层的有机结合,使无纺拖布拥有较大的纳污量和理想、均匀的出水速率,从而改善扫地机器人的清理效果。并且可以灵活调节拖布的厚度与出水速率大小,以满足不同型号扫地机器人用拖布的设计需要。具体使用时不区分正反面,结构简单、牢固,成本低廉,使用方便。
2、为实现上述目的,设计一种用于扫地机器人的多层复合无纺拖布,其特征在于:无纺拖布从上至下依次包括摩擦层一、支撑层一、缓流层、支撑层二、摩擦层二,所述的摩擦层一、摩擦层二均选用克重为50-100g/m2的亲水涤纶纤维;所述的支撑层一、支撑层二选用克重为60-120g/m2的涤纶纤维;所述的缓流层选用es纤维与纤维素纤维混合后的复合纤维,es纤维与纤维素纤维的质量比为1:1-1:4,复合纤维的克重为50-100g/m2。
3、所述的无纺拖布的克重为270-540g/m2。
4、所述的摩擦层一、摩擦层二通过非织造水刺加固工艺制备得到。
5、所述的支撑层一、支撑层二通过非织造针刺加固工艺制备得到。
6、所述的缓流层通过非织造干法成网后经热轧粘合得到。
7、所述的摩擦层一、支撑层一、缓流层、支撑层二、摩擦层二之间通过超声波粘合工艺相互连接。
8、所述的超声波粘合工艺中,设置超声波粘合装置的频率为10-15khz,a段振幅为30-60%,b段振幅为40-70%,超声时间为2-8秒,延时时间为0.5-5秒,固化时间为0.1-3秒,振落振幅为2-8%。
9、所述的无纺拖布为轴对称结构。
10、本发明同现有技术相比,通过设置不同功能层的有机结合,使无纺拖布拥有较大的纳污量和理想、均匀的出水速率,从而改善扫地机器人的清理效果。并且可以灵活调节拖布的厚度与出水速率大小,以满足不同型号扫地机器人用拖布的设计需要。具体使用时不区分正反面,结构简单、牢固,成本低廉,使用方便。
技术特征:
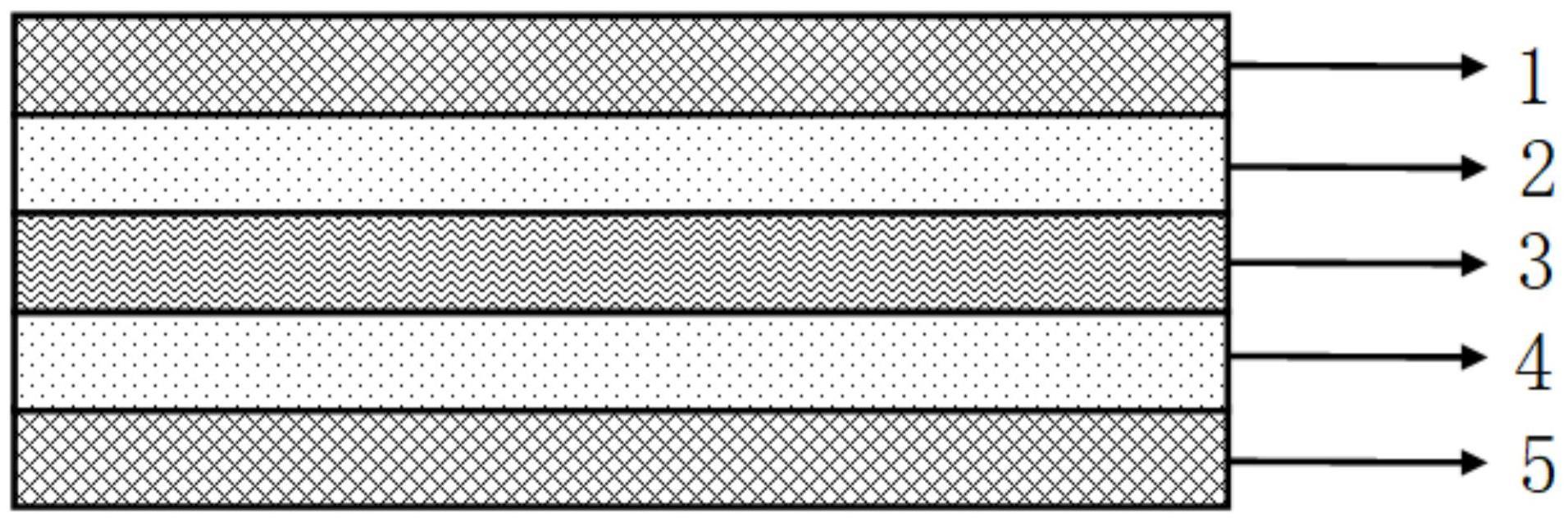
1.一种用于扫地机器人的多层复合无纺拖布,其特征在于:无纺拖布从上至下依次包括摩擦层一(1)、支撑层一(2)、缓流层(3)、支撑层二(4)、摩擦层二(5),所述的摩擦层一(1)、摩擦层二(5)均选用克重为50-100g/m2的亲水涤纶纤维;所述的支撑层一(2)、支撑层二(4)选用克重为60-120g/m2的涤纶纤维;所述的缓流层(3)选用es纤维与纤维素纤维混合后的复合纤维,es纤维与纤维素纤维的质量比为1:1-1:4,复合纤维的克重为50-100g/m2。
2.根据权利要求1所述的一种用于扫地机器人的多层复合无纺拖布,其特征在于:所述的无纺拖布的克重为270-540g/m2。
3.根据权利要求1所述的一种用于扫地机器人的多层复合无纺拖布,其特征在于:所述的摩擦层一(1)、摩擦层二(5)通过非织造水刺加固工艺制备得到。
4.根据权利要求1所述的一种用于扫地机器人的多层复合无纺拖布,其特征在于:所述的支撑层一(2)、支撑层二(4)通过非织造针刺加固工艺制备得到。
5.根据权利要求1所述的一种用于扫地机器人的多层复合无纺拖布,其特征在于:所述的缓流层(3)通过非织造干法成网后经热轧粘合得到。
6.根据权利要求1所述的一种用于扫地机器人的多层复合无纺拖布,其特征在于:所述的摩擦层一(1)、支撑层一(2)、缓流层(3)、支撑层二(4)、摩擦层二(5)之间通过超声波粘合工艺相互连接。
7.根据权利要求6所述的一种用于扫地机器人的多层复合无纺拖布,其特征在于:所述的超声波粘合工艺中,设置超声波粘合装置的频率为10-15khz,a段振幅为30-60%,b段振幅为40-70%,超声时间为2-8秒,延时时间为0.5-5秒,固化时间为0.1-3秒,振落振幅为2-8%。
8.根据权利要求1所述的一种用于扫地机器人的多层复合无纺拖布,其特征在于:所述的无纺拖布为轴对称结构。
技术总结
本发明涉及无纺拖布技术领域,具体地说是一种用于扫地机器人的多层复合无纺拖布。其特征在于:无纺拖布从上至下依次包括摩擦层一、支撑层一、缓流层、支撑层二、摩擦层二,所述的摩擦层一、摩擦层二均选用克重为50‑100g/m<supgt;2</supgt;的亲水涤纶纤维;所述的支撑层一、支撑层二选用克重为60‑120g/m<supgt;2</supgt;的涤纶纤维;所述的缓流层选用ES纤维与纤维素纤维混合后的复合纤维,ES纤维与纤维素纤维的质量比为1:1‑1:4,复合纤维的克重为50‑100g/m<supgt;2</supgt;。同现有技术相比,通过设置不同功能层的有机结合,使无纺拖布拥有较大的纳污量和理想、均匀的出水速率,从而改善扫地机器人的清理效果。并且可以灵活调节拖布的厚度与出水速率大小,以满足不同型号扫地机器人用拖布的设计需要。
技术研发人员:朱磊
受保护的技术使用者:上海哈克过滤科技股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!