一种梭织用定向多级寻纬装置的制作方法
1.本实用新型涉及梭织机领域,具体是涉及一种梭织用定向多级寻纬装置。
背景技术:
2.近年来,我国梭织机的技术能力水平正在稳步提高并进一步缩小了与发达国家的差距,因此各厂家对梭织机的性能要求越来越高。其中梭织机的寻纬动作的技术要求向着高速、稳定以及高效率发展。
3.目前市场上的梭织机所采用的寻纬机构都有着复杂的齿轮传动链,存在着传动链过长、寻纬动作慢和工作效率低下等种种局限性。另外传统的寻纬机构为达到高速寻纬的目的会设置有独立的外部负载,使得制造成本不断上升。
技术实现要素:
4.为解决上述技术问题,提供一种梭织用定向多级寻纬装置,本技术方案解决了上述背景技术中提出的目前市场上的梭织机所采用的寻纬机构都有着复杂的齿轮传动链,存在着传动链过长、寻纬动作慢和工作效率低下等种种局限性。另外传统的寻纬机构为达到高速寻纬的目的会设置有独立的外部负载,使得制造成本不断上升的问题。
5.为达到以上目的,本实用新型采用的技术方案为:
6.一种梭织用定向多级寻纬装置,其特征在于,包括安装大墙板,所述安装大墙板前端左侧底部固定连接有主电机,所述安装大墙板右侧转动连接有主轴,所述安装大墙板内部通过轴承转动连接有主动齿轮,所述主电机输出端与主动齿轮固定连接,所述主轴一端固定连接有主轴大齿轮,所述主轴大齿轮位于安装大墙板内部,所述安装大墙板内部转动连接有多臂传动大齿轮,所述安装大墙板上固定安装有寻纬传动制动机构,所述寻纬传动制动机构包括寻纬电机总成,所述寻纬电机总成前侧固定连接有电动寻纬座,所述电动寻纬座一侧通过转轴活动连接有串动齿轮,所述电动寻纬座在串动齿轮同一侧通过转轴活动连接有制动辅助棘轮,所述串动齿轮和制动辅助棘轮均与寻纬电机总成输出端固定连接,所述寻纬换向机构有寻纬状态和非寻纬状态。
7.优选的,所述寻纬电机总成包括伺服电机和减速器,所述伺服电机前端固定连接有减速器,所述伺服电机输出端与减速器输入端固定连接,所述减速器可将伺服电机输入的转动动量转化为直线动量输出。
8.优选的,所述寻纬换向机构处于非寻纬状态时,所述主动齿轮与串动齿轮相互啮合,所述串动齿轮与多臂传动大齿轮相互啮合,所述串动齿轮与多臂传动大齿轮右侧面齐平,所述制动辅助棘轮与主轴大齿轮相互啮合。
9.优选的,所述寻纬换向机构处于寻纬状态时,所述主动齿轮与串动齿轮相互啮合,所述串动齿轮与多臂传动大齿轮相互啮合,所述所述串动齿轮与多臂传动大齿轮左侧面齐平,所述串动齿轮与主轴大齿轮相互啮合。
10.优选的,所述安装大墙板内部在串动齿轮与主轴大齿轮位置处设置有传感器。
11.与现有技术相比,本实用新型的优点在于:
12.1)在寻纬传动制动机构中加入了制动辅助棘轮,在非寻纬状态下,由制动辅助棘轮与主轴大齿轮相啮合,可有效防止主轴出现逆向转动;同时能够有效制动,消除电机所带来的惯性运动,使寻纬前的准备时间大幅减少提高了工作效率;
13.2)进行寻纬动作时,采用伺服电机作为动力源进行推动,简化了内部机构,减少了内部齿轮的多级传动所带来的误差以及可能出现的机械故障,同时减少了外部负载,寻纬状态下直接由主轴对寻纬动作进行驱动。大幅简化了整体机构,减少了不必要的传动链,使得机构更加简洁易行,缩短了工作时间,提高了工作效率;
14.3)采用伺服电机加减速器的结构进行寻纬动作推动,与传感器相互配合可以达到闭环控制的效果,寻纬精度大幅提高,有效的提高了设备进行寻纬动作的可靠性。
附图说明
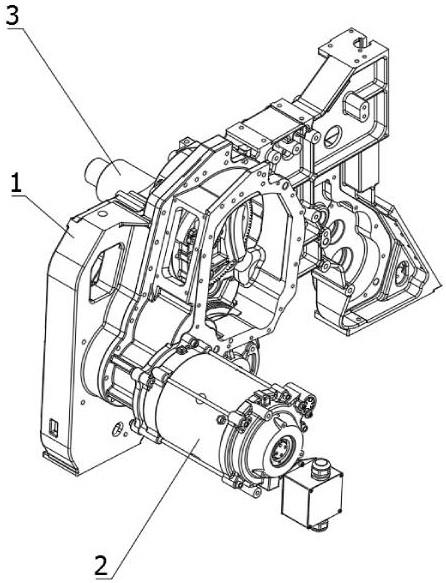
15.图1为本实用新型的立体结构示意图;
16.图2为本实用新型在寻纬状态下的内部立体结构示意图;
17.图3为本实用新型在寻纬状态下的另一视角下的内部立体结构示意图;
18.图4为本实用新型在非寻纬状态下的内部立体结构示意图;
19.图5为本实用新型中的寻纬传动制动机构的立体结构示意图。
20.图中标号为:
21.1、安装大墙板;2、主电机;3、主轴;4、寻纬传动制动机构;401、伺服电机;402、减速器;403、串动齿轮;404、制动辅助棘轮;405、电动寻纬座;5、主轴大齿轮;6、主动齿轮;7、多臂传动大齿轮。
具体实施方式
22.以下描述用于揭露本实用新型以使本领域技术人员能够实现本实用新型。以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。
23.参照图1-5所示,一种梭织用定向多级寻纬装置,其特征在于,包括安装大墙板1,安装大墙板1前端左侧底部固定连接有主电机2,安装大墙板1右侧转动连接有主轴3,安装大墙板1内部通过轴承转动连接有主动齿轮6,主电机2输出端与主动齿轮6固定连接,主轴3一端固定连接有主轴大齿轮5,主轴大齿轮5位于安装大墙板1内部,安装大墙板1内部转动连接有多臂传动大齿轮7,安装大墙板1上固定安装有寻纬传动制动机构4,寻纬传动制动机构4包括寻纬电机总成,寻纬电机总成前侧固定连接有电动寻纬座405,电动寻纬座405一侧通过转轴活动连接有串动齿轮403,电动寻纬座405在串动齿轮403同一侧通过转轴活动连接有制动辅助棘轮404,串动齿轮403和制动辅助棘轮404均与寻纬电机总成输出端固定连接,寻纬电机总成包括伺服电机401和减速器402,伺服电机401前端固定连接有减速器402,伺服电机401输出端与减速器402输入端固定连接,减速器402可将伺服电机401输入的转动动量转化为直线动量输出,安装大墙板1内部在串动齿轮403与主轴大齿轮5位置处设置有传感器,传感器用于监测串动齿轮403与主轴大齿轮5脱开和复位位置,并将信号输送至伺服电机401,与伺服电机401形成闭环控制,寻纬换向机构有寻纬状态和非寻纬状态,当进行寻纬动作时,采用伺服电机401作为动力源进行推动,寻纬传动制动机构4使得寻纬换向机
构在非寻纬状态和寻纬状态下进行切换,简化了内部机构,减少了内部齿轮的多级传动所带来的误差以及可能出现的机械故障,提高了整体机构的检修频率,提高设备的工作效率,采用伺服电机401加减速器402的结构与传感器相互配合达到闭环控制的效果,寻纬精度大幅提高,有效的提高了设备进行寻纬动作的可靠性。
24.寻纬换向机构处于非寻纬状态时,主动齿轮6与串动齿轮403相互啮合,串动齿轮403与多臂传动大齿轮7相互啮合,串动齿轮403与多臂传动大齿轮7右侧面齐平,制动辅助棘轮404与主轴大齿轮5相互啮合,在非寻纬状态下,由制动辅助棘轮404与主轴大齿轮5相啮合,可有效防止主轴3出现逆向转动;同时能够有效制动,消除电机所带来的惯性运动,使寻纬前的准备时间大幅减少,提高了工作效率。
25.寻纬换向机构处于寻纬状态时,主动齿轮6与串动齿轮403相互啮合,串动齿轮403与多臂传动大齿轮7相互啮合,串动齿轮403与多臂传动大齿轮7左侧面齐平,串动齿轮403与主轴大齿轮5相互啮合,寻纬状态下直接由主轴3对寻纬动作进行驱动,大幅简化了整体机构,减少了不必要的传动链,使得机构更加简洁易行,缩短了工作时间,提高了工作效率。
26.本实用新型的工作原理为:在非寻纬状态由主电机2带动主动齿轮6进行转动,此时主动齿轮6与串动齿轮403相互啮合,串动齿轮403与多臂传动大齿轮7相互啮合,由主电机2作为内部传动的动力源进行整体传动,而制动辅助棘轮404与主轴大齿轮5相啮合,可有效防止主轴3出现逆向转动,在需要进行寻纬动作时,主动齿轮6关闭,由伺服电机401带动减速器402进行驱动寻纬传动制动机构4进入寻纬状态,使得主动齿轮6与串动齿轮403相互啮合,串动齿轮403与多臂传动大齿轮7相互啮合,串动齿轮403与主轴大齿轮5相互啮合,制动辅助棘轮404与主轴大齿轮5断开啮合,直接由主轴3对寻纬动作进行驱动。
27.综上所述,本实用新型的优点在于:采用制动辅助棘轮与主轴大齿轮进行啮合,有效的减低了防止主轴出现逆向转动;同时采用伺服电机进行推动,可以达到闭环控制的效果,寻纬精度大幅提高,有效的提高了设备进行寻纬动作的可靠性,提高设备的生产效率。
28.以上显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是本实用新型的原理,在不脱离本实用新型精神和范围的前提下本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型的范围内。本实用新型要求的保护范围由所附的权利要求书及其等同物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1