一种捻股成绳用摇篮自动夹盘装置的制作方法
1.本实用新型涉及捻股机设备技术领域,特别是一种捻股成绳用摇篮自动夹盘装置。
背景技术:
2.捻股机齿轮双夹紧装置主要是由六棱轴、安装于过渡板上的各齿轮、螺纹外套、螺纹内套、顶尖轴组成,其中最小的齿轮安装于六棱轴上,由六棱轴控制;螺纹外套装于最大的齿轮上,螺纹内套与顶尖轴则装于螺纹外套,通过螺纹外套的旋转可以带动螺纹内套与顶尖轴前后转动;其中各侧齿轮相互配合。其总体的工作原理如下:
3.以500型管绳机举例,通过人工操作转动六棱轴,六棱轴带动两侧齿轮进行配合运动,使螺纹外套跟随大齿轮一起旋转,当螺纹外套旋转时,螺纹内套与顶尖轴随着旋转方向向内或向外运动,从而形成齿轮双夹紧装置的打开与锁紧。
4.在现有的捻股机齿轮双夹紧装置中,大部分都是采用人工操作,此操作会有几个弊端,首先人工操作浪费人力资源,需要额外付出更多人工的费用;其次安全方面无法控制,当机器出现故障时,人无法及时回避,容易造成安全事故;最后,人工操作费时费力,需要人跑来跑去一个个操控,相比花费时间较多。
5.针对上述问题,期望提供一种捻股成绳用摇篮自动夹盘装置。
技术实现要素:
6.针对现有捻股机齿轮双夹紧装置的操作不便,浪费人力资源以及具有安全隐患的问题,本实用新型提供一种捻股成绳用摇篮自动夹盘装置,操作简单、降低危险性、减轻人力负担。
7.一种捻股成绳用摇篮自动夹盘装置,包括机械臂组件,还包括摇篮组件;
8.所述机械臂组件的夹持端上安装有电机,所述电机的输出轴上固定有第一齿轮;
9.所述摇篮组件包括壳体、两个传动模块和两个夹持模块;
10.所述壳体上水平转动设有连接轴,所述连接轴的两端穿过壳体的两侧壁,所述连接轴上固定有第二齿轮,所述第二齿轮与所述第一齿轮相适配,且第二齿轮的齿数大于第一齿轮的齿数;所述连接轴的两端均固定有第三齿轮;
11.两个所述传动模块均包括若干传动齿轮,若干所述传动齿轮转动设置在所述壳体的两侧外壁上,依次啮合;
12.两个夹持模块均包括第四齿轮、螺纹外套、螺纹内套和顶尖轴;所述螺纹外套水平转动设置在所述壳体的侧壁上,所述螺纹外套的内壁上设有内螺纹;所述第四齿轮固定在所述螺纹外套上位于壳体外侧的一端上,所述第四齿轮与所述传动模块上最靠近的传动齿轮相啮合;所述螺纹内套的外壁上设有外螺纹,所述内螺纹与所述外螺纹相适配,所述螺纹内套通过所述内/外螺纹的配合套接在所述螺纹外套上;所述顶尖轴套接固定在所述螺纹内套的内孔上,两个夹持模块上的顶尖轴位于同一轴线上。
13.优选地,所述电机为伺服电机。
14.优选地,所述连接轴为六棱轴。
15.优选地,所述电机的输出轴上设有防滑装置,所述防滑装置包括两个轴用挡圈,所述电机的输出轴上位于第一齿轮的两侧上设有卡簧槽,两个所述轴用挡圈分别安装在两个所述卡簧槽上。
16.优选地,所述捻股成绳用摇篮自动夹盘装置还包括探头装置,所述探头装置包括传感器和测距板;所述测距板固定在任一顶尖轴的外端面上,所述传感器安装在壳体上,且与所述测距板位于所述壳体的同一侧。
17.本实用新型的一种捻股成绳用摇篮自动夹盘装置,跟现有技术相比具有以下优点:
18.(1)用自动化控制,减少人力资源,只需在工作范围之外控制启动电源即可操作,简易人工工作内容,保证一定的安全性,提高操作准确性;
19.(2)减轻人力资源的负担,准确有效的运行,操作更为简单,大大降低了人工操作的危险性;
20.(3)结构简单,使用方便。
附图说明
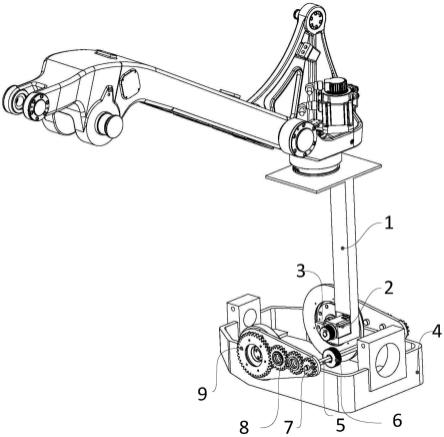
21.图1为本实施例的一种捻股成绳用摇篮自动夹盘装置的结构示意图;
22.图2为本实施例中的摇篮组件的结构示意图;
23.图3为本实施例中的摇篮组件的爆炸图;
24.图4为本实施例中的防滑装置的爆炸图。
具体实施方式
25.如图1所示,一种捻股成绳用摇篮自动夹盘装置,包括机械臂组件1和摇篮组件。
26.所述机械臂组件1的夹持端上安装有电机2,在本实施例中,所述电机2为伺服电机。所述电机2的输出轴上固定有第一齿轮3。
27.如图2所示,所述摇篮组件包括壳体4、两个传动模块和两个夹持模块;所述壳体4上水平转动设有连接轴5,所述连接轴5的两端穿过壳体4的两侧壁,所述连接轴5上固定有第二齿轮6,所述第二齿轮6所述第一齿轮3相适配,且第二齿轮6的齿数大于第一齿轮3 的齿数;所述连接轴5的两端均固定有第三齿轮7。
28.在本实施例中,所述连接轴5为六棱轴,起到防滑的作用,有效固定住第二齿轮6。进一步地,如图4所示,所述电机2的输出轴上设有防滑装置,所述防滑装置包括两个轴用挡圈16,所述电机2的输出轴上位于第一齿轮3的两侧上设有卡簧槽15,两个所述轴用挡圈1 6分别安装在两个所述卡簧槽15上,对第一齿轮3起到固定作用,有效防止其在电机2的输出轴上发生轴向窜动。
29.两个所述传动模块均包括若干传动齿轮8,若干所述传动齿轮8转动设置在所述壳体4 的两侧外壁上,依次啮合,起到传动的作用。
30.如图3所示,两个夹持模块均包括第四齿轮9、螺纹外套13、螺纹内套14和顶尖轴12;所述螺纹外套13水平转动设置在所述壳体4的侧壁上,所述螺纹外套13的内壁上设有内
螺纹;所述第四齿轮9固定在所述螺纹外套13上位于壳体4外侧的一端上,所述第四齿轮9与所述传动模块上最靠近的传动齿轮相啮合;所述螺纹内套14的外壁上设有外螺纹,所述内螺纹与所述外螺纹相适配,所述螺纹内套14通过所述内/外螺纹的配合套接在所述螺纹外套13 上;所述顶尖轴12套接固定在所述螺纹内套14的内孔上,两个夹持模块上的顶尖轴12位于同一轴线上。
31.在进行工作时,当需要换盘时,由机械臂组件1移动下降到指定位置,第二齿轮6装于摇篮组件中的六棱轴上,当机械臂组件1下降到指定位置时,第一齿轮3与第二齿轮6相触碰,伺服电机启动,控制第一齿轮3与第二齿轮6的配合,从而实现其正反转,从而实现六棱轴转动,六棱轴带动两侧的第三齿轮7进行配合运动,使螺纹外套13跟随第四齿轮9一起旋转,当螺纹外套13旋转时,螺纹内套14与顶尖轴12随着旋转方向向内或向外运动,从而形成齿轮双夹紧装置的打开与锁紧。
32.在本实施例中,如图3所示,所述捻股成绳用摇篮自动夹盘装置还包括探头装置,所述探头装置包括传感器10和测距板11;所述测距板11固定在任一顶尖轴12的外侧端面上,所述传感器10安装在壳体4上,且与所述测距板11位于所述壳体4的同一侧。当伺服电机启动后,测距板11随着顶尖轴12进行移动,此时传感器10测量测距板到其自身的距离,到到达设定的距离范围后,传感器10反馈数据,确认成功打开或锁紧,此时暂停伺服电机,机械臂组件1控制离开进行下一组操作,确保工字轮能不受阻碍的上下盘。
33.尽管上面已经示出和描述了本实用新型的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本实用新型的限制,本领域的普通技术人员在本实用新型的范围内可以对上述实施例进行变化、修改、替换和变型。
技术特征:
1.一种捻股成绳用摇篮自动夹盘装置,包括机械臂组件,其特征在于,还包括摇篮组件;所述机械臂组件的夹持端上安装有电机,所述电机的输出轴上固定有第一齿轮;所述摇篮组件包括壳体、两个传动模块和两个夹持模块;所述壳体上水平转动设有连接轴,所述连接轴的两端穿过壳体的两侧壁,所述连接轴上固定有第二齿轮,所述第二齿轮与所述第一齿轮相适配,且第二齿轮的齿数大于第一齿轮的齿数;所述连接轴的两端均固定有第三齿轮;两个所述传动模块均包括若干传动齿轮,若干所述传动齿轮转动设置在所述壳体的两侧外壁上,依次啮合;两个夹持模块均包括第四齿轮、螺纹外套、螺纹内套和顶尖轴;所述螺纹外套水平转动设置在所述壳体的侧壁上,所述螺纹外套的内壁上设有内螺纹;所述第四齿轮固定在所述螺纹外套上位于壳体外侧的一端上,所述第四齿轮与所述传动模块上最靠近的传动齿轮相啮合;所述螺纹内套的外壁上设有外螺纹,所述内螺纹与所述外螺纹相适配,所述螺纹内套通过所述内/外螺纹的配合套接在所述螺纹外套上;所述顶尖轴套接固定在所述螺纹内套的内孔上,两个夹持模块上的顶尖轴位于同一轴线上。2.据权利要求1所述的一种捻股成绳用摇篮自动夹盘装置,其特征在于,所述电机为伺服电机。3.据权利要求1所述的一种捻股成绳用摇篮自动夹盘装置,其特征在于,所述连接轴为六棱轴。4.据权利要求3所述的一种捻股成绳用摇篮自动夹盘装置,其特征在于,所述电机的输出轴上设有防滑装置,所述防滑装置包括两个轴用挡圈,所述电机的输出轴上位于第一齿轮的两侧上设有卡簧槽,两个所述轴用挡圈分别安装在两个所述卡簧槽上。5.据权利要求1~4任一项所述的一种捻股成绳用摇篮自动夹盘装置,其特征在于,所述捻股成绳用摇篮自动夹盘装置还包括探头装置,所述探头装置包括传感器和测距板;所述测距板固定在任一顶尖轴的外端面上,所述传感器安装在壳体上,且与所述测距板位于所述壳体的同一侧。
技术总结
本实用新型涉及一种捻股成绳用摇篮自动夹盘装置,包括机械臂组件和摇篮组件;机械臂组件的夹持端上安装有电机,电机的输出轴上固定有第一齿轮;摇篮组件包括壳体、两个传动模块和两个夹持模块;壳体上水平转动设有连接轴,连接轴上固定有第二齿轮;连接轴的两端均固定有第三齿轮;两个传动模块均包括若干传动齿轮;两个夹持模块均包括第四齿轮、螺纹外套、螺纹内套和顶尖轴;螺纹外套水平转动设置在壳体的侧壁上,螺纹外套的内壁上设有内螺纹;第四齿轮固定在螺纹外套上位于壳体外侧的一端上;螺纹内套的外壁上设有外螺纹;顶尖轴套接固定在螺纹内套的内孔。本实用新型的一种捻股成绳用摇篮自动夹盘装置,操作简单、降低危险性、减轻人力负担。减轻人力负担。减轻人力负担。
技术研发人员:朱晓东 王瑜 周波 吴妍菁
受保护的技术使用者:江苏亘联科技有限公司
技术研发日:2022.06.09
技术公布日:2022/9/16
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1