一种基于BIM的智能爬架与外墙作业机器人系统的制作方法
一种基于bim的智能爬架与外墙作业机器人系统
技术领域
1.本实用新型涉及建筑机器人技术领域,特别涉及一种基于bim的智能爬架与外墙作业机器人系统。
背景技术:
2.随着国家对建筑领域智能建造技术的大力支持和政策导向,市场上越来越多的公司、研究院所等均向建筑机器人方向发展。广东博智林机器人有限公司、上海大界机器人科技有限公司、上海同济宝冶建设机器人有限公司等一大批建筑领域的公司先后在建筑机器人领域进行产品研发及其专利布局,然而多处于研发阶段,真正落地并可实现商业化的寥寥无几。目前bim技术、智能爬架、建筑机器人都还是相互独立的技术,还没有出现将三者融合在一起并用于实际建筑领域的专利、产品或解决方案。
3.目前,没有发现将bim(building information modeling)技术、智能爬架技术和高层外墙外墙作业机器人技术相融合的专利或产品,没有发现可实现较小转弯半径的滑触条式电导轨,没有发现用于爬架上并采用双导轨设计的电导轨。
技术实现要素:
4.针对上述问题,本实用新型提出一种基于bim的智能爬架与外墙作业机器人系统,将bim技术、智能爬架技术和机器人技术融合并用于高层建筑的外墙作业,具体内容如下:
5.一种基于bim的智能爬架与外墙作业机器人系统,包括智能爬架和外墙作业机器人;所述智能爬架包括带行轨的爬架;所述行轨包括上导轨和下导轨;所述外墙作业机器人的一端与上导轨活动连接,另一端与下导轨活动连接;所述上导轨下方安装有电导轨,作为外墙作业机器人的供电平台。
6.进一步的改进在于:所述智能爬架还包括基于bim的爬架管理平台和爬架智能安全监测系统;所述基于bim的爬架管理平台为终端控制软件,通过网络远程对爬架施工过程进行管理;所述基于bim的爬架管理平台与所述爬架智能安全监测系统数据互通。
7.进一步的改进在于:所述爬架包括外立杆、三角撑、脚手板、升降导轨和内立杆,若干所述外立杆和对应的三角撑组合连接形成爬架的主体立面,所述主体立面内表面等距并列固定有若干水平放置的脚手板,所述脚手板沿长度方向的一个侧面与所述主体立面固定连接;所述下导轨与脚手板连接,所述上导轨与外立杆连接;所述脚手板沿长度方向的另一个侧面与竖直的升降导轨以及内立杆固定连接,所述升降导轨和内立杆并排设于所述主体立面的内侧。
8.进一步的改进在于:所述上导轨、下导轨、电导轨的轨迹相同;所述电导轨包括直线电导轨和圆弧电导轨。
9.进一步的改进在于:所述电导轨包括线槽、滑触线、滑触条、吊卡、集电器、中间连接器和防水刷;所述外墙作业机器人的供电采用滑触线和集电器配合的方式,所述线槽安装在上导轨下方;所述滑触条安装在滑触线内;所述滑触线通过吊卡安装在线槽内侧;所述
集电器的一端安装在外墙作业机器人上,另一端与电导轨滑触连接;所述中间连接器安装在线槽内壁上;所述防水刷位于线槽内侧底部。
10.进一步的改进在于:所述集电器包括集电盒,所述集电盒前端设有与电导轨滑触连接的触头;所述集电盒后侧固定有集电盒盖,所述集电盒下端固定有连接座。
11.进一步的改进在于:所述外墙作业机器人包括驱动装置、升降装置、机器臂、执行器;所述执行器安装于所述机器臂的末端上;所述机器臂安装于所述升降装置上;所述升降装置与驱动装置连接;所述升降装置用于调节机器臂的作业高度;所述驱动装置一端与上导轨活动连接,另一端与下导轨活动连接;所述驱动装置用于带动外墙作业机器人在行轨上的行走。
12.进一步的改进在于:所述驱动装置包括槽式摩擦轮、夹持轮和驱动控制箱,所述槽式摩擦轮位于驱动控制箱的底部,由伺服驱动电机驱动,所述槽式摩擦轮可以绕竖直中心轴线旋转运动;所述夹持轮采用双滚轮式u型支架,位于驱动控制箱的顶部;所述夹持轮可以绕竖直中心轴线旋转运动。
13.进一步的改进在于:所述外墙作业机器人包括3d激光传感器以及基于3d激光传感器的墙面信息提取与分析系统;所述3d激光传感器安装于外墙作业机器人上,用于实时采集墙面的信息。
14.进一步的改进在于:所述外墙作业机器人包括机器人控制系统、上位机;上位机用于与机器人控制系统进行远程交互,以及对外墙作业机器人作业路径的快速规划和对外墙作业机器人的实时监控。
15.本实用新型的有益效果:本实用新型提出了一种基于bim的智能爬架与外墙作业机器人系统,将bim技术、智能爬架、传感器技术和建筑机器人技术相结合,实现了bim模型数据与外墙作业机器人和爬架控制系统数据的实时互联,外墙作业机器人末端执行器根据bim模型系统规划的路径进行精准作业,解决了长期以来高层外墙外墙作业机器人缺乏围绕建筑物的全方位供电平台和通用作业平台的难题,同时开拓性地将bim技术与建筑机器人技术相结合,形成了一套针对高层建筑外墙作业的智能化解决方案。
附图说明
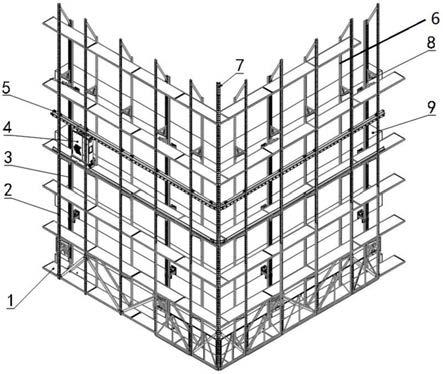
16.图1为本实用新型智能爬架系统结构图;
17.图2为本实用新型爬架的行轨结构图;
18.图3为本实用新型的电导轨结构图;
19.图4为本实用新型的圆弧形电导轨结构图;
20.图5为本实用新型集电器结构图;
21.图6为本实用新型外墙作业机器人结构图。
22.附图标记说明:
[0023]1‑
脚手板,2
‑
外立杆,3
‑
升降导轨,4
‑
外墙作业机器人,5
‑
行轨,6
‑
内立杆,7
‑
转角立杆,8
‑
三角撑,9
‑
建筑物,10
‑
下导轨,11
‑
集电器,12
‑
电导轨,13
‑
上导轨,14
‑
圆弧电导轨,15
‑
线槽,16
‑
吊卡,17
‑
滑触线,18
‑
滑触条,19
‑
中间连接器,20
‑
防水刷,21
‑
集电盒盖,22
‑
压线块,23
‑
连接座,24
‑
触头,25
‑
集电盒,26
‑
夹持轮,27
‑
执行器,28
‑
机器臂,29
‑
升降装置,30
‑
驱动控制箱,31
‑
槽式摩擦轮。
具体实施方式
[0024]
下面结合附图对本实用新型作进一步详细描述,有必要在此指出的是,以下具体实施方式只用于对本实用新型进行进一步的说明,不能理解为对本实用新型保护范围的限制,该领域的技术人员可以根据上述申请内容对本实用新型作出一些非本质的改进和调整。
[0025]
请参考图1
‑
图6,本实施例提供一种基于bim的智能爬架与外墙作业机器人系统,包括智能爬架和外墙作业机器人4;所述智能爬架包括带行轨5的爬架;所述爬架通过竖立的转角立杆7衔接两个竖立爬架,两所述竖立爬架之间具有夹角,所述行轨5包括上导轨13和下导轨10;所述外墙作业机器人4的一端与上导轨13活动连接,另一端与下导轨10活动连接;所述上导轨13下方安装有电导轨12,作为外墙作业机器人4的供电平台。
[0026]
本实用新型实施例中的上导轨13采用h型钢,下导轨10采用t型钢,为施工设备或建筑外墙作业机器人4提供了稳定的动态作业平台。
[0027]
通过设置上导轨13和下导轨10可以让外墙作业机器人4在爬架上平稳的行走,通过设置电导轨12可以为外墙作业机器人4提供电力来源,避免了外墙作业机器人4在作业过程中电量不足的问题。
[0028]
进一步的,本实用新型实施例所述的智能爬架还包括基于bim的爬架管理平台和爬架智能安全监测系统;所述基于bim的爬架管理平台为终端控制软件,安装于终端设备上,例如手机,平板电脑或者电脑上均可,通过网络远程对爬架施工过程进行管理;所述爬架智能安全监测系统包括传感器、主控箱和分控箱;所述传感器设置在爬架上,包括拉力传感器、顶撑传感器(型号xc
‑
03a
‑
d)、防坠传感器(型号xc
‑
03a
‑
f)、风速风压传感器(型号xc
‑
03a
‑
f1)、导座电池电量传感器(型号xc
‑
03a
‑
d1);爬架上每个机位对应的爬架网框处安装有一台分控箱,所述拉力传感器、顶撑传感器、防坠传感器、风速风压传感器、导座电池电量传感器的输出端与分控箱电性连接;每个爬架安装有一个主控制箱;所述分控箱与主控箱电性连接,所述主控箱与所述基于bim的爬架管理平台通过无线网络连接,爬架智能安全监测系统把检测到的数据传输到基于bim的爬架管理平台以便于基于bim的爬架管理平台对爬架施工过程进行管理。所述基于bim的爬架管理平台与所述爬架智能安全监测系统数据互通。
[0029]
如图1所示,本实用新型实施例所述的爬架包括外立杆2、三角撑8、脚手板1、升降导轨3和内立杆6,若干所述外立杆2和对应的三角撑8组合连接形成爬架的主体立面,所述主体立面内表面等距并列固定有若干水平放置的脚手板1,所述脚手板1沿长度方向的一个侧面与所述主体立面固定连接;所述下导轨10与脚手板1连接,所述上导轨13与外立杆2连接;所述脚手板1沿长度方向的另一个侧面与竖直的升降导轨3以及内立杆6固定连接,所述升降导轨3和内立杆6并排设于所述主体立面的内侧。每一个主体立面内侧至少设有两个均匀分布的升降导轨3。
[0030]
进一步的,本发明实施例中所述的上导轨13、下导轨10、电导轨12的轨迹相同;所述电导轨12包括直线电导轨和圆弧电导轨14,同理的,所述下导轨10包括直线下导轨和圆弧下导轨,所述上导轨13包括直线上导轨和圆弧上导轨;两所述竖立爬架之间夹角的地方的电导轨采用圆弧电导轨14的形式,两直线电导轨之间通过圆弧电导轨14进行衔接;直线上导轨和圆弧上导轨之间通过螺栓和定位块连接在一起,形成闭环轨道;
[0031]
通过设置圆弧电导轨14、圆弧下导轨、圆弧上导轨,有利于外墙作业机器人4在行轨5上行走时在夹角处的平稳转弯。
[0032]
如图3所示,本实用新型实施例所述的电导轨12包括线槽15、滑触线17、滑触条18、吊卡16、集电器11、中间连接器19和防水刷20;所述外墙作业机器人4的供电采用滑触线17和集电器11配合的方式,所述线槽15安装在上导轨13下方;所述滑触条18安装在滑触线17内;所述滑触线17通过吊卡16安装在线槽15内侧;滑触条18的数量根据电压的不同而不同;所述集电器11的一端安装在外墙作业机器人4上,另一端与电导轨12滑触连接;所述中间连接器19安装在线槽15内壁上,用于直线电导轨12中的滑触条18与圆弧电导轨14的滑触条18之间的衔接;所述防水刷20位于线槽15内侧底部。
[0033]
通过安装有柔软而又质密的防水刷20,防水刷20利用耐火材料制作而成,防尘、防火又防水,防水刷20间留有较小的间隙,既保证集电器11可以通行顺畅,还可以避免施工过程中水、油漆、泥沙、混凝土颗粒等异物进入电导轨12,保障了施工过程中的用电安全。
[0034]
如图5所示,所述集电器11包括上部的集电盒25,所述集电盒25前端设有与电导轨12滑触连接的触头24;所述的集电盒25内有绝缘活塞和弹簧可以实现触头24的小行程活动;所述的触头24安装在绝缘活塞上;所述集电盒25后侧固定有集电盒盖21,所述集电盒25下端固定连接座23。
[0035]
如图6所示,所述外墙作业机器人4包括驱动装置、升降装置29、机器臂28、执行器27;所述执行器27安装于所述机器臂28的末端上;所述机器臂28采用的是六自由度机器臂,安装于所述升降装置29上;所述升降装置29与驱动装置连接;所述升降装置29用于调节机器臂28的作业高度;所述驱动装置一端与上导轨13活动连接,另一端与下导轨10活动连接;所述驱动装置用于带动外墙作业机器人4在行轨5上的行走。
[0036]
在本实用新型实施例中,升降装置29采用的是高精度高可靠性的滑台模组。除此之外,其它能够实现提升和下降的装置均可。
[0037]
在本实用新型实施例中,外墙作业机器人4的执行器27采用金钢石砂轮片,可对拆除模板后的墙面进行打磨处理,以处理脚模板等特殊位置的不良平整度的墙面,减少在灰尘量大的环境下的人员作业,提高效率。在本实用新型的另外一些实施例中,外墙作业机器人4的执行器27还可以采用雾化喷头,可对墙面进行喷涂作业,减少在雾化漆弥漫的环境下的人员喷涂作业,提高效率;除此之外,外墙作业机器人4的执行器27还可以通过更换不同的功能模块完成不同的墙面处理要求,例如外墙打磨、补洞、刮腻子、喷涂等,甚至可以用于其它施工工序,例如绑扎钢筋、装拆模板等工序。
[0038]
进一步的,本实用新型实施例所述的驱动装置包括槽式摩擦轮31、夹持轮26和驱动控制箱30,所述槽式摩擦轮31位于驱动控制箱30的底部,由伺服驱动电机驱动,使用时,槽式摩擦轮31的凹槽与t型钢的下导轨10卡接,由伺服驱动电机来驱动其在t型钢的下导轨10运动,所述槽式摩擦轮31可以绕自身的竖直中心轴线旋转运动,以便于在行轨5上的转弯;所述夹持轮26采用双滚轮式u型支架,位于驱动控制箱30的顶部,设置有两组;使用时,双滚轮夹持住h型钢的上导轨13;所述夹持轮26可以绕自身的竖直中心轴线旋转运动,以便于在行轨5上的转弯。
[0039]
进一步的,本实用新型实施例所述的外墙作业机器人4包括3d激光传感器以及基于3d激光传感器的墙面信息提取与分析系统;所述3d激光传感器安装于外墙作业机器人4
的末端上,用于实时采集建筑墙面的信息,所述基于3d激光传感器的墙面信息提取与分析系统用于对3d激光传感器所采集的信息进行提取和分析。
[0040]
进一步的,本实用新型实施例所述的外墙作业机器人4还包括机器人控制系统、上位机;所述上位机用于与机器人控制系统进行远程交互,以及对外墙作业机器人4作业路径的快速规划和对外墙作业机器人4的实时监控;所述机器人控制系统用于控制六自由度机器臂的工作。
[0041]
本实用新型实施例将bim技术、智能爬架、传感器技术和建筑机器人技术相结合,实现了bim模型数据与机器人和爬架控制系统数据的实时互联,外墙作业机器人4末端执行器27根据bim模型规划的路径进行精准作业,解决了长期以来高层外墙外墙作业机器人4缺乏围绕建筑物9的全方位供电平台和通用作业平台的难题,同时开拓性地将bim技术与建筑机器人技术相结合,形成了一套针对高层建筑外墙作业的智能化解决方案。
[0042]
本实用新型实施例的主要工作原理:使用bim软件根据目标建筑物9设计二维图完成其bim三维模型,把bim三维模型导入到上位机,在上位机上对bim三维模型的目标作业区域进行人为设定,上位机根据人为设定的目标区域自动进行外墙作业机器人4的路径规划,并生成作业路径数据包;把作业路径数据包发送到机器人控制系统,外墙作业机器人4开始在行轨5上行走作业,当一道工序执行完毕,外墙作业机器人4停止作业,将执行器27进行快速更换,外墙作业机器人4开始下一道工序的作业,以此类推直至完成所有的工序;当外墙作业机器人4将该层的外墙面作业完成时,外墙作业机器人4停止作业和前进,基于bim的爬架管理平台通过无线网络将控制信号发送至爬架智能安全监测系统,并根据行业规范在有现场管理人员的情况下,以及确保安全的前提下,对爬架进行提升作业,以便外墙作业机器人对下一层外墙面进行作业。
[0043]
在本实用新型的另外一些实施例中,与上述实施例不同的是,采用的是内行轨式,内行轨式与外行轨式不同,内行轨式是指行轨5安装在内立杆6上,相对于爬架离墙更近,但为保证外墙作业机器人4的通过性,内行轨式上导轨13和下导轨10的距离要减小。与上述实施例h型钢和t型钢不同的是,行轨5采用其它截面形状的型材作为轨道,例如圆管式,c型钢等均可作为行轨5的选型,只需要改变结构的支撑方式即可。在本实用新型的另外一些实施例中,可采用单行轨的形式,与双行式不同,采用单个轨道的形式,可安装于外立杆2,或者安装于内立杆6,但是截面更大,承载力更大,也可以在爬架上实现电导轨12的功能。在本实用新型的另外一些实施例中,可采用带集电轮的集电器11,触头24使用带有集电轮的形式,而非触头直接接触,这样的好处是触头24的摩损很小,而且可以更好地和滑触线17进行接触,但是结构会稍微复杂些,在尺寸较小的电导轨12中有可能不太适用。
[0044]
以上所述实施例仅表达了本实用新型的实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变换或改进,这些都属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1