一种智能除雪机
1.本实用新型涉及积雪清扫技术领域,尤其涉及一种智能除雪机。
背景技术:
2.北方的冬天经常会出现下雪的情况,尤其是东北地区,屋顶的积雪清扫面积大,并且清扫困难,但是在屋顶上的积雪堆积起来就可能造成坍塌的可能,尤其是彩钢瓦搭建的厂房。
3.现有技术(cn111502136a)中公开了一种屋顶除雪机,包括用于设置在屋顶上的滑轨支架、滑动设置在滑轨支架上的移动滑块、用于驱动移动滑块运动的驱动机构、以及设置在移动滑块上的清扫机构,移动滑块与清扫机构之间还设置有多个弹性伸缩杆。本实用新型提供的屋顶除雪机,通过驱动机构驱动移动滑块在滑轨支架上移动,移动滑块带动清扫机构移动对屋顶的积雪进行清理,清扫机构的顶部转动吊装在移动滑块的下方并通过弹性伸缩杆进行辅助支撑,在清扫机构遇到障碍物以后可以通过自身的转动并压缩弹性伸缩杆实现躲避障碍,并在通过障碍物后通过弹性伸缩杆的弹性将清扫机构推正,使清扫机构恢复到正常的位置状态,提高了除雪工作的效率。
4.但是这种清雪装置是直接将雪扫落到地下,之后还是得人工对雪进行再一次的清理,因此如何实现高效,便捷的清雪便成了本技术领域人员需要解决的问题。
技术实现要素:
5.针对如何高效、便捷对雪进行清理的技术问题,本实用新型提供了一种智能除雪机,通过移动机构在导轨上的移动,带动清雪器的移动,将雪清理至积雪传送装置上的兜雪框内,再集中处理;并且除雪机可以移动。
6.为了达到上述目的,本实用新型是通过以下技术方案实现的:
7.一种智能除雪机,包括导轨、移动机构、压力传感器、伸缩装置、积雪传送装置以及控制器;导轨分为x向导轨、y向导轨、z向导轨;移动机构分为第一移动机构、第二移动机构、第三移动机构;
8.x向导轨平行安装在工作面的左右两侧,y向导轨架接于x向导轨的上表面并且与x向导轨垂直,在x向导轨与y向导轨之间设置有第一移动机构,第二移动机构设置在y向导轨的侧面,第二移动机构上安装有z向导轨,第三移动机构设置在z 向导轨的侧面;在z向导轨的下端还安装有清雪器;
9.在工作面的下表面安装有压力传感器;在工作面的下方还安装有伸缩装置,伸缩装置与所述积雪传送装置固定连接;
10.控制器分别连接、控制移动机构、压力传感器、伸缩装置以及积雪传送装置。
11.与现有技术相比,本实用新型具有以下优点:通过移动机构在导轨上的移动,带动清雪器的移动,将雪清理至积雪传送装置上的兜雪框内,再将雪集中处理。
12.进一步优选为:导轨为直线导轨,直线导轨为滑块导轨或者丝杠导轨中的任意一
种,x向导轨和y向导轨的长度大于工作面x方向和y方向的长度。
13.采用上述技术方案,丝杠导轨的传动效率高,定位精度准确,轴向刚度高,并且具有传动的可逆性;直线导轨可与多种传动结构搭配使用。
14.进一步优选为:移动机构为移动块,移动机构沿x方向、y方向、z方向进行移动,移动块设在导轨的表面。
15.采用上述技术方案,移动机构在导轨表面上移动,实现刮雪器在x、y、z方向上的移动。
16.进一步优选为:压力传感器为压力传感器为半导体压电阻型,压力传感器的数量至少为1个。
17.采用上述技术方案,多个压力传感器有利于对工作面积雪量的准确判断,进而实现刮雪刀的精确工作,半导体压电阻型的灵敏度与精度高、易于小型化和集成化、结构简单、工作可靠。
18.进一步优化为:伸缩装置为伸缩臂或者传送带模组,伸缩臂的伸出长度大于工作面x方向的长度,伸缩臂与x向导轨的方向平行。
19.采用上述技术方案,伸缩臂或传送带将积雪传送装置从工作面的下方移动处来进行工作;伸缩臂的可靠性高,伸缩长度长,可支撑力大;传送带的结构简单,便于维护修理。
20.进一步优化为:积雪传送装置包括兜雪框和传送带,兜雪框设置在传送带的上表面,传送带的长度大于工作面y方向的长度。
21.采用上述技术方案,刮刀将雪从工作面送至兜雪框,再将雪集中,方便对雪的集中处理,并且传送带的长度大于工作面y方向上的长度保证将雪送至预定地点。
22.进一步优化为:控制器为51单片机。
23.采用上述技术方案,51单片机的操作指令简单,简单便捷,资源丰富,价格便宜。
24.进一步优化为:清雪器为刮雪刀或者吸雪器。
25.采用上述技术方案,根据不用的场景选择不用的清雪器,为除雪器提供更多的选择。
26.进一步优化为:除雪机还包括行走机构,行走机构设置在积雪传送装置的下方,行走机构上还设置有移动轮,移动轮与地面接触。
27.采用上述技术方案,行走机构带动除雪机进行移动,不再局限于某一特定区域内的积雪清扫。
附图说明
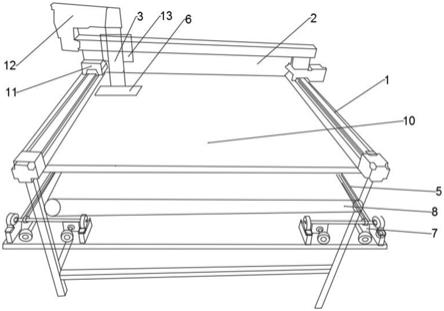
28.图1为本实施例一种智能除雪机的结构示意图;
29.图2为本实施例一种智能除雪机的俯视图;
30.图3为本实施例一种智能除雪机的主视图;
31.图4为本实施例中积雪输送装置的结构示意图。
32.附图标记:1
‑
x向导轨;2
‑
y向导轨;3
‑
z向导轨;4
‑
压力传感器;5
‑
伸缩装置;6
‑
清雪器;7
‑
积雪输送装置;8
‑
输送皮带;9
‑
兜雪框;10
‑
工作面;11
‑
第一移动机构; 12
‑
第二移动机构;13
‑
第三移动机构。
具体实施方式
33.以下结合附图1至图4对本实用新型作进一步详细介绍。
34.一种智能除雪机,用于积雪清扫,如图1至图4所示,包括导轨、移动机构、压力传感器4、伸缩装置5、积雪传送装置7以及控制器;导轨分为x向导轨1、y向导轨2、z向导轨3;移动机构分为第一移动机构11、第二移动机构12、第三移动机构12以及移动机构;
35.x向导轨1平行安装在工作面的左右两侧,y向导轨2架接于x向导轨1的上表面并且与x向导轨1垂直,在x向导轨1与y向导轨2之间设置有第一移动机构11,第二移动机构12设置在y向导轨2的侧面,第二移动机构12上安装有z向导轨3,第三移动机构13设置在z向导轨3的侧面;在z向导轨3的下端还安装有清雪器6;
36.在工作面10的下表面安装有压力传感器4;在工作面10的下方还安装有伸缩装置5,伸缩装置5与所述积雪传送装置7固定连接;
37.控制器分别连接和控制移动机构、压力传感器4、伸缩装置5以及积雪传送装置 7。
38.如图1或图3所示,导轨包括x向导轨1和y向导轨2以及z向导轨3,并且上述导轨为直线导轨,x向导轨1和分布在工作面10的左右两侧并且俩条导轨为平行关系,z向导轨3安装在y向导轨2的侧面,在x向导轨1和y向导轨2之间安装有第一移动机构11,y向导轨2与z向导轨3之间安装有第二移动机构12,在z向导轨3上安装有第三移动机构13;第一移动机构11带动y向导轨2在x方向进行移动,第二移动机构12带动z向导轨3在y方向移动2,第三移动机构13在z方向升降移动,在第三移动机构13的下端安装有清雪器6;上述移动机构根据51单片机的指令进行移动完成工作面10积雪的清扫;在工作面10的下檐设置安装有积雪输送装置7;上述单片机可以对压力传感器的触发压力值进行预设,单片机还可对移动机构的移动位置以及刮雪刀6的高度进行调整。
39.如图2所示在工作面10的下表面安装有压力传感器4,压力传感器4与51单片机电性连接,当工作面10积雪的重量达到压力传感器4的预设值后,51单片机控制伸缩装置5将积雪输送装置7从工作面10的下端伸出,并且积雪输送装置7中的输送皮带8开始工作,移动机构带动清雪器6进行清雪作业;清雪器6将积雪清理至积雪输送装置7中的输送皮带8上,输送皮带8将积雪输送至其他位置,完成工作面10 的积雪清理。
40.如图4所示,积雪传送装置7和伸缩装置5固定连接,本实施例中的伸缩装置5 为同步轮模组,同步轮模组负责将积雪传送装置从屋檐下送出,积雪传送装置的上表面上设置有兜雪框,兜雪框用于存放积雪。
41.优选的:导轨为直线导轨,直线导轨为滑块导轨或者丝杠导轨中的任意一种,x 向导轨和y向导轨的长度大于工作面x方向和y方向的长度,丝杠导轨的传动效率高,定位精度准确,轴向刚度高,并且具有传动的可逆性;直线导轨可与多种传动结构搭配使用。
42.移动机构包括支撑导轨的支撑杆和移动轮,支撑杆的上端与导轨通过螺栓固定连接,支撑杆的下方安装有移动轮,移动轮通过螺栓固定安装在支撑杆的下方,移动机构与地面接触,可以对除雪机的工作区域以及位置进行调整。
43.优选的:移动机构为移动块,移动机沿x方向、y方向、z方向进行移动,移动块设在导轨的表面,移动机构在导轨表面上移动,实现刮雪器在x、y、z方向上的移动。
44.优选的:压力传感器为压力传感器为半导体压电阻型,压力传感器的数量至少为 1个,多个压力传感器有利于对工作面积雪量的准确判断,进而实现刮雪刀的精确工作,半
导体压电阻型的灵敏度与精度高、易于小型化和集成化、结构简单、工作可靠。
45.优选的:伸缩装置为伸缩臂或者传送带模组,伸缩臂的伸出长度大于工作面x方向的长度,伸缩臂与x导轨的方向平行,伸缩臂或传送带将积雪传送装置从工作面的下方移动处来进行工作;伸缩臂的可靠性高,伸缩长度长,可支撑力大;同步轮模组由联轴器、电机变速组件、电机、滑块、同步带以及同步轮,电机与电机变速组件连接,电机变速组件与联轴器连接,联轴器与同步轮连接,同步轮分为主动同步轮和从动同步轮,主动同步轮和从动同步轮之间连接有同步带,滑块与同步带固定连接,当同步带发生位移时,滑块也随之产生位移,完成积雪传送装置的伸缩的功能。
46.优选的:积雪传送装置包括兜雪框和传送带,兜雪框设置在传送带的上表面,传动带的长度大于工作面y方向的长度,刮刀将雪从工作面送至兜雪框,再将雪集中,方便对雪的集中处理,并且传送带的长度大于工作面y方向上的长度保证将雪送至预定地点。
47.优选的:控制器为51单片机,51单片机的操作指令简单,简单便捷,资源丰富,价格便宜。
48.优选的:清雪器为刮雪刀或者吸雪器,根据不用的场景选择不用的清雪器,为除雪器提供更多的选择。
49.优选的:除雪机还包括行走机构,行走机构设置在除雪机的下方,行走机构上还设置有移动轮,移动轮与地面接触,行走机构带动除雪机进行移动,使清雪器的工作范围更加的灵活。
50.工作原理:
51.当屋顶雪的重量触动压力传感器4时,压力传感器4将信号传输至控制器中,控制器在收到信息后进行处理,再将执行信号发送至移动机构11、伸缩装置5以及积雪传送装置7,控制器先控制伸缩装置5将传送积雪传送装置7从工作面10(屋檐)下推出,积雪传送装置7开始工作;移动机构11根据控制器的指令在x向导轨1、y 向导轨2上调整好位置后z向导轨3上的清雪器6下降至工作高度,x向导轨1上的移动机构11带动清雪器6沿x向导轨1移动将雪推送至传送带8上的兜雪框9内,再由传送带8带动兜雪框9将雪输送至指定地点完成屋顶雪的清扫;清扫完成后,移动机构可以带动除雪机进行移动,实现不同工作区域的积雪清扫。
52.本具体实施例仅仅是对实用新型的解释,其并不是对本实用新型的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本实用新型的保护范围内都受到专利法的保护。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1