一种自动化智能装修施工装置的制作方法
1.本实用新型涉及装饰装修技术领域,尤其涉及一种自动化智能装修施工装置。
背景技术:
2.在地板或者瓷砖的铺设等家装过程,大多还是采用人工施工的方式进行,人力成本高,工作效率低。现代化的施工中,采用机械臂夹持铺设,能够有效地减轻工人的劳动强度,而在采用机械臂夹持铺设瓷砖的过程中,现有的夹具不能同时适应不同大小或形状的瓷砖,从而夹持不稳或需更换夹具,使用较为麻烦。
技术实现要素:
3.针对上述现有技术中存在的缺陷和不足,本实用新型提出一种自动化智能装修施工装置,可根据铺设瓷砖的大小或形状控制九宫格夹具框架底部相应的吸盘与真空泵连通,瓷砖夹持稳定,便于铺设。
4.本实用新型上述目的通过以下技术方案实现:
5.一种自动化智能装修施工装置,包括移动小车,所述移动小车上设有机械臂,所述机械臂的端部连接一夹具,所述夹具包括与机械臂连接的九宫格夹具框架,所述九宫格夹具框架的底部设有若干吸盘,所述若干吸盘分别通过管道与设置于移动小车上的真空泵连接,且每一吸盘与真空泵之间的管道上设有电磁阀。
6.优选的,所述若干吸盘有十六个,分别设于所述九宫格夹具框架底部的各交角处。
7.优选的,所述移动小车上位于机械臂的一侧安装有托盘。
8.优选的,所述九宫格夹具框架的一端设有涂胶枪,所述涂胶枪的喷嘴朝下设置。
9.优选的,所述移动小车上位于机械臂的一侧安装有托盘,所述移动小车上位于托盘的下方设有粘合剂搅拌桶,所述粘合剂搅拌桶通过管道与所述涂胶枪连接。
10.优选的,所述移动小车上设有调整臂,所述调整臂的底端设有调整地脚。
11.优选的,所述移动小车底部的两侧设有带轮,所述带轮上设有履带。
12.优选的,所述机械臂为六轴机械臂。
13.与现有技术相比,本实用新型技术方案的有益效果是:
14.本实用新型通过设置于移动小车上的机械臂和固定于机械臂端部的夹具在预设程序的控制下,实现自动化铺设地板或瓷砖,可根据待铺设瓷砖(或地板)的大小或形状控制相应电磁阀,从而控制相应吸盘与真空泵之间的连通与否,无需更换夹具即可适应相应大小或形状的瓷砖,使瓷砖在夹取过程中受力更加均匀,能够有效防止瓷砖掉落;机械臂带动夹具移动,夹具不断地夹起瓷砖,并将其平铺在地面上,之后移动小车带动整个装置进行移动,机械臂和夹具配合重复上述瓷砖夹起和放置的铺设作业,整个过程自动化作业,减少了人力成本,提高了施工精度和施工质量并且提高了工作效率。
15.本实用新型的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本实用新型的研究和实践而为本领域的技术人员所理解。
附图说明
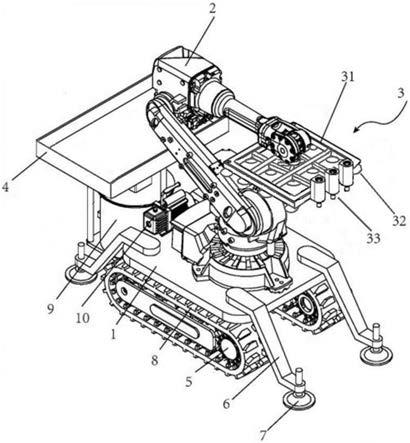
16.图1本实施例的自动化智能装修施工装置示意图;
17.图中:移动小车1、机械臂2、夹具3、九宫格夹具框架31、吸盘32、涂胶枪33、托盘4、带轮5、调整臂6、调整地脚7、履带8、粘合剂搅拌桶9、真空泵10。
具体实施方式
18.附图仅用于示例性说明,不能理解为对本专利的限制;
19.为了更好说明本实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;
20.对于本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的;
21.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“设置”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以是通过中间媒介间接连接,可以说两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型的具体含义。
22.下面结合附图和实施例对本实用新型的技术方案做进一步的说明。
23.如图1所示,本实施例的自动化智能装修施工装置,其包括移动小车1,所述移动小车1上设有机械臂2,所述机械臂2的端部连接一夹具3,所述夹具3包括与机械臂2固定连接的九宫格夹具框架31,所述九宫格夹具框架31的底部设有若干吸盘32,所述若干吸盘32分别通过管道与设置于移动小车1上的真空泵10连接,且每一吸盘32与真空泵10之间的管道上设有电磁阀(图未示)。
24.具体优选至本实施例中,机械臂2为六轴机械臂,六轴机械臂具有全方位移动的效果,更接近于人工的灵活度。吸盘32共有十六个,分别设于所述九宫格夹具框架31底部的各交角处形成4
×
4点阵排布,根据待铺设瓷砖(或地板)的大小或形状控制相应电磁阀,从而控制相应吸盘与真空泵之间的连通与否,无需更换夹具即可适应相应大小或形状的瓷砖,使瓷砖在夹取过程中受力更加均匀,有效防止瓷砖掉落。使用时,在完成对电磁阀的控制后,启动真空泵10,对应的电磁阀处于开通状态的吸盘对瓷砖进行吸附夹持,机械臂2带动夹具3将该被吸附夹持的瓷砖放至指定位置后,通过调节真空泵10,使吸盘脱离瓷砖表面完成一次铺设操作。
25.如图1所示,所述移动小车1上位于机械臂2的一侧安装有托盘4,用于盛放待铺设的地板或瓷砖,方便夹具3进行夹取。所述移动小车1的四角处分别设有z型的调整臂6,每个调整臂6的一端与移动小车1的机架连接、另一端贴近地面,并且贴近地面的一端上设有调整地脚7,如此,在移动小车1移动到位后进行铺设作业时,调整地脚7能够起到支撑作用,以保持整个装置的平稳。所述移动小车1底部的两侧设有带轮5,所述带轮5上设有履带8,采用带轮5带动履带8的移动方式,可确保整个装置移动稳定,便于装饰装修作业。
26.在另一较佳实施例中,所述九宫格夹具框架31的一端设有多个涂胶枪33,各涂胶枪33的喷嘴朝下设置,移动小车1上位于托盘4的下方设有粘合剂搅拌桶9,该粘合剂搅拌桶9通过管道(图未示)与涂胶枪33连接,且每一涂胶枪33设有电磁阀(图未示)。粘合剂搅拌桶
9中设有不断搅动的搅拌装置,当涂胶枪33中粘合剂用完后可以直接通过粘合剂搅拌桶9输送搅拌均匀的粘合剂,减少涂胶枪33的更换,方便实用。当夹具3夹取瓷砖并在机械臂2带动下移动到指定位置后,涂胶枪33上的电磁阀打开,其中的粘合剂通过喷嘴喷涂到地面上,同时机械臂2配合移动,使粘合剂均匀涂抹到地面,再将瓷砖放至指定位置,关闭真空泵10,吸盘32松开放下瓷砖,完成铺设。当然,也可以先喷涂粘合剂后再夹取瓷砖进行铺设。
27.最后说明的是,以上实施例仅用以说明本实用新型的技术方案而非限制,尽管参照较佳实施例对本实用新型进行了详细说明,本领域的普通技术人员应当理解,可以对本实用新型的技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的宗旨和范围,其均应涵盖在本实用新型的权利要求范围当中。
技术特征:
1.一种自动化智能装修施工装置,包括移动小车,所述移动小车上设有机械臂,所述机械臂的端部连接一夹具,其特征在于,所述夹具包括与机械臂连接的九宫格夹具框架,所述九宫格夹具框架的底部设有若干吸盘,所述若干吸盘分别通过管道与设置于移动小车上的真空泵连接,且每一吸盘与真空泵之间的管道上设有电磁阀;所述若干吸盘有十六个,分别设于所述九宫格夹具框架底部的各交角处。2.根据权利要求1所述的自动化智能装修施工装置,其特征在于,所述移动小车上位于机械臂的一侧安装有托盘。3.根据权利要求1所述的自动化智能装修施工装置,其特征在于,所述九宫格夹具框架的一端设有涂胶枪,所述涂胶枪的喷嘴朝下设置。4.根据权利要求3所述的自动化智能装修施工装置,其特征在于,所述移动小车上位于机械臂的一侧安装有托盘,所述移动小车上位于托盘的下方设有粘合剂搅拌桶,所述粘合剂搅拌桶通过管道与所述涂胶枪连接。5.根据权利要求1所述的自动化智能装修施工装置,其特征在于,所述移动小车上设有调整臂,所述调整臂的底端设有调整地脚。6.根据权利要求1所述的自动化智能装修施工装置,其特征在于,所述移动小车底部的两侧设有带轮,所述带轮上设有履带。7.根据权利要求1所述的自动化智能装修施工装置,其特征在于,所述机械臂为六轴机械臂。
技术总结
本实用新型涉及装饰装修技术领域,公开了一种自动化智能装修施工装置,其包括移动小车,所述移动小车上设有机械臂,所述机械臂的端部连接一夹具,所述夹具包括与机械臂连接的九宫格夹具框架,所述九宫格夹具框架的底部设有若干吸盘,所述若干吸盘分别通过管道与设置于移动小车上的真空泵连接,且每一吸盘与真空泵之间的管道上设有电磁阀。本装置可根据待铺设瓷砖的大小或形状控制相应电磁阀,从而使得无需更换夹具即可适应相应大小或形状的瓷砖,使瓷砖在夹取过程中受力均匀,夹持稳定;机械臂和夹具配合完成瓷砖夹起和放置的铺设作业,移动小车带动整个装置进行移动,便于铺设作业的持续进行,整个过程自动化作业,人力成本低,装修效率高。装修效率高。装修效率高。
技术研发人员:何水清
受保护的技术使用者:广州建誉利业建设发展股份有限公司
技术研发日:2020.12.29
技术公布日:2022/3/8
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1