一种T梁生产的分层自动给料控制系统及控制方法
一种t梁生产的分层自动给料控制系统及控制方法
技术领域
1.本发明属于建筑施工技术,涉及梁的生产、浇筑技术,具体为一种t梁生产的分层自动给料控制系统及控制方法。
背景技术:
2.t梁是指横截面形状为t型的梁,其两侧挑出部分为翼缘,中间部分为腹板,由于其相当于是将矩形梁中对抗弯强度不起作用的受拉区混凝土挖去后形成的,其与原有矩形抗弯强度完全相同外,既可以节约混凝土,又可以减轻构件的自重,提高了跨越能力;应用越来越广泛。
3.t梁在预制浇筑或现场浇筑时,其自动化生产过程是保障整个交通建设工程工期和工程质量的关键。由于现阶段t梁在生产过程中一般仍由人工控制混凝土的给料速度和给料量,给料完成后再通过人工控制混凝土的振捣,将混凝土振捣均匀、平整,整个施工过程粗放,严重影响了t梁的生产效率和生产质量。
技术实现要素:
4.针对上述现有的人工对t梁进行浇筑和振捣时,影响t梁的生产效率和生产质量的问题,本发明提出了一种t梁生产的分层自动给料控制系统及控制方法。
5.一种t梁生产的分层自动给料控制系统,包括t梁图像三维重建模块、集成控制器、图像采集单元和给料器,
6.所述t梁图像三维重建模块用于在集成控制器中生成t梁图像三维重建模型;
7.所述图像采集单元用于实时采集t梁的分层浇筑量,并将分层浇筑量传输给集成控制器;
8.所述集成控制器用于接收分层浇筑量,并将分层浇筑量与t梁图像三维重建模型中对应层级的混凝土浇筑量进行对比,根据对比结果为给料器发送给料工作指令;
9.所述给料器根据集成控制器发送的给料工作指令继续给料作业或停止给料作业。
10.进一步限定,所述t梁生产的分层自动给料控制系统还包括振捣器,
11.所述图像采集单元用于实时采集t梁的分层振捣目标高度和分层振捣平整度,并将采集的分层振捣目标高度和分层振捣平整度传输给集成控制器;
12.所述集成控制器用于接收分层振捣目标高度和分层振捣平整度,并将接收的分层振捣目标高度和分层振捣平整度与t梁图像三维重建模型中对应层级的分层振捣目标高度和分层振捣平整度进行对比,根据对比结果为振捣器发送振捣工作指令;
13.所述振捣器根据集成控制器发送的振捣工作指令继续振捣作业或停止振捣作业。
14.进一步限定,所述t梁图像三维重建模块具体是:
15.所述图像采集单元采集t梁的三维结构图像,并将t梁的三维结构图像传输给集成控制器;
16.所述集成控制器用于接收t梁的三维结构图像,将t梁的三维结构图像转换为t梁
图像三维重建模型并储存。
17.进一步限定,所述t梁包括自下而上依次并列设置的多个浇筑层。
18.基于上述t梁生产的分层自动给料控制系统实现t梁生产的分层自动给料控制方法,包括以下步骤:
19.1)在集成控制器内生成t梁图像三维重建模型;
20.2)通过图像采集单元实时采集t梁的分层浇筑量,并将采集的分层浇筑量传输给集成控制器;
21.3)集成控制器接收分层浇筑量,并将分层浇筑量与t梁图像三维重建模型中对应层级的混凝土浇筑量进行对比,根据对比结果为给料器发送给料工作指令;
22.4)给料器根据集成控制器发送的给料工作指令继续给料作业或停止给料作业。
23.进一步限定,所述步骤还包括:
24.5)通过图像采集单元实时采集t梁的分层振捣目标高度和分层振捣平整度,并将采集的分层振捣目标高度和分层振捣平整度传输给集成控制器;
25.6)集成控制器接收分层振捣目标高度和分层振捣平整度,并将接收的分层振捣目标高度和分层振捣平整度与t梁图像三维重建模型中对应层级的分层振捣目标高度和分层振捣平整度进行对比,根据对比结果为振捣器发送振捣工作指令;
26.7)振捣器根据集成控制器发送的振捣工作指令继续振捣作业或停止振捣作业。
27.进一步限定,所述步骤1)具体为:
28.1.1)图像采集单元采集t梁的三维结构图像,并将t梁的三维结构图像传输给集成控制器;
29.1.2)集成控制器接收t梁的三维结构图像,将t梁的三维结构图像转换为t梁图像三维重建模型并对t梁图像三维重建模型进行储存。
30.进一步限定,所述图像采集单元为相机;所述给料器为混凝土泵机。
31.与现有技术相比,本发明的有益效果在于:
32.本发明一种t梁生产的分层自动给料控制系统,其包括t梁图像三维重建模块、集成控制器、图像采集单元和给料器,通过t梁图像三维重建模块在集成控制器中生成t梁图像三维重建模型;通过图像采集单元实时采集t梁的分层浇筑量、分层振捣目标高度和分层振捣平整度,并将分层浇筑量、分层振捣目标高度和分层振捣平整度传输给集成控制器;集成控制器接收分层浇筑量、分层振捣目标高度和分层振捣平整度,将分层浇筑量、分层振捣目标高度和分层振捣平整度与t梁图像三维重建模型中对应层级的分层浇筑量、分层振捣目标高度和分层振捣平整度进行对比分析,分别生成振捣工作指令和给料工作指令,将振捣工作指令发送给振捣器,控制振捣器的工作,将给料工作指令发送给给料器,控制给料器的工作。本发明的t梁生产的分层自动给料控制系统充分利用了三维重建技术,反馈控制技术,快速自动地完成混凝土t梁的分层给料和分层振捣过程,与现有的人工给料和振捣相比,具有快速、高效、与使用安全的优点,节省了人力,保证了施工效率和施工质量。
附图说明
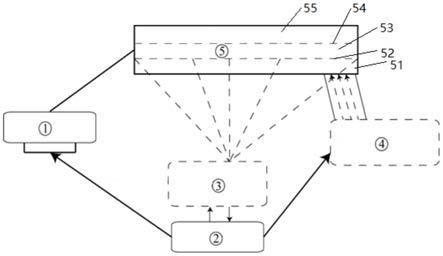
33.图1为本发明t梁生产自动给料控制系统的示意图;
34.图2为t梁生产线自动给料控制技术路线图;
35.图3为多视角深度图像获取示意图;
36.图4为图像坐标点获取意图;
37.其中,1-振捣器,2-集成控制器,3-图像采集单元,4-给料器,5-混凝土t梁,51-第一浇筑振捣层,52-第一层标高线,53-第二浇筑振捣层,54-第二层标高线,55-第三浇筑振捣层。
具体实施方式
38.下面结合附图及实施例对本发明的技术方案进行进一步地解释说明,但本发明并不限于以下说明的实施方式。
39.本发明一种t梁生产的分层自动给料控制系统,包括t梁图像三维重建模块、集成控制器2、图像采集单元3和给料器4,t梁图像三维重建模块用于在集成控制器2中生成t梁图像三维重建模型;图像采集单元3用于实时采集t梁5的分层浇筑量,并将分层浇筑量传输给集成控制器2;集成控制器2用于接收分层浇筑量,并将分层浇筑量与t梁图像三维重建模型中对应层级的混凝土浇筑量进行对比,根据对比结果为给料器4发送给料工作指令;给料器4根据集成控制器2发送的给料工作指令继续给料作业或停止给料作业。t梁生产的分层自动给料控制系统还包括振捣器1,图像采集单元3用于实时采集t梁5的分层振捣目标高度和分层振捣平整度,并将采集的分层振捣目标高度和分层振捣平整度传输给集成控制器2;集成控制器2用于接收分层振捣目标高度和分层振捣平整度,并将接收的分层振捣目标高度和分层振捣平整度与t梁图像三维重建模型中对应层级的分层振捣目标高度和分层振捣平整度进行对比,根据对比结果为振捣器1发送振捣工作指令;振捣器1根据集成控制器2发送的振捣工作指令继续振捣作业或停止振捣作业。t梁图像三维重建模块具体是:图像采集单元3采集t梁5的三维结构图像,并将t梁5的三维结构图像传输给集成控制器2;控制器2用于接收t梁5的三维结构图像,将t梁5的三维结构图像转换为t梁图像三维重建模型并储存。t梁5包括自下而上依次并列设置的多个浇筑层。
40.基于上述t梁生产的分层自动给料控制系统实现t梁生产的分层自动给料控制方法,包括以下步骤:
41.1)在集成控制器2内生成t梁图像三维重建模型;
42.2)通过图像采集单元3实时采集t梁5的分层浇筑量,并将采集的分层浇筑量传输给集成控制器2;
43.3)集成控制器2接收分层浇筑量,并将分层浇筑量与t梁图像三维重建模型中对应层级的混凝土浇筑量进行对比,根据对比结果为给料器4发送给料工作指令;
44.4)振捣器1根据集成控制器2发送的振捣工作指令继续振捣作业或停止振捣作业。
45.步骤还包括:
46.5)通过图像采集单元3实时采集t梁5的分层振捣目标高度和分层振捣平整度,并将采集的分层振捣目标高度和分层振捣平整度传输给集成控制器2;
47.6)集成控制器2接收分层振捣目标高度和分层振捣平整度,并将接收的分层振捣目标高度和分层振捣平整度与t梁图像三维重建模型中对应层级的分层振捣目标高度和分层振捣平整度进行对比,根据对比结果为振捣器1发送振捣工作指令;
48.7)振捣器1根据集成控制器2发送的振捣工作指令继续振捣作业或停止振捣作业。
49.步骤1)具体为:
50.1.1)图像采集单元3采集t梁5的三维结构图像,并将t梁5的三维结构图像传输给集成控制器2;
51.1.2)集成控制器2接收t梁5的三维结构图像,将t梁5的三维结构图像转换为t梁图像三维重建模型并对t梁图像三维重建模型进行储存。
52.图像采集单元3为相机;给料器4为混凝土泵机。
53.实施例1
54.参见图1,本实施例一种t梁生产的分层自动给料控制系统,其包括t梁图像三维重建模块、振捣器1、集成控制器2、图像采集单元3以及给料器4,t梁5分为三层,为自上而下依次并列的设置的第一浇筑振捣层51、第二浇筑振捣层53以及第三浇筑振捣层55,第一浇筑振捣层51的最顶层为第一层标高线52,第二浇筑振捣,52的最顶层为第二层标高线54。
55.t梁图像三维重建模块用于在集成控制器2中生成t梁图像三维重建模型;具体为:图像采集单元3采集t梁5的三维结构图像,并将t梁5的三维结构图像传输给集成控制器2;控制器2用于接收t梁5的三维结构图像,将t梁5的三维结构图像转换为t梁图像三维重建模型并储存。具体为t梁图像三维重建模型建立过程如下:
56.①
多视角深度图像获取:参见图3,利用图像采集单元3对t梁5进行拍摄,以t梁任意角点前倾斜45
°
方向距离l
㎝
(l的取值范围为400
㎝‑
500
㎝
)的位置作为摄站1(拍摄点1),拍摄照片记为f1,以摄站1为基准点顺时针45
°
方向布置摄站2(拍摄点2),拍摄照片记为f2,以此类推,指导布置至摄站8(拍摄点8),通过8个摄站,获得t梁5不通过角度的图像;
57.②
图像转化,参见图4,a(u,v)为图像坐标下的任意一点,通过坐标转换公式(1)将深度图像转换成点云坐标ac(x
ω
,y
ω
,z
ω
),
[0058][0059][0060][0061]
式中:u、v为图像坐标系下的a点坐标;u0、v0分别为a点所在照片图像中的中心坐标;x
ω
、y
ω
、z
ω
为点云数据下的三维坐标点;f为相机焦距;zc为t梁5的摄站到相机的距离,r为3
×
3旋转矩阵,t为3
×
1平移矩阵。
[0062]
利用公式(1)、公式(2)以及公式(3)完成所拍摄t梁5照片所有图像点的坐标转换,形成点云数据。
[0063]
③
滤波去噪
[0064]
采用双边滤波来改善点云数据中噪声的影响,将图3上任意两点ac(u,v),b(k,l)代入双边滤波公式:
[0065][0066]
式中:ω(u,v,k,l)为加权系数;g(u,v)为输出图像值;f(k,l)为原始图形二维图像值;u、v为第一个像素点a的坐标;k、l为第二个像素点b的坐标。
[0067]
④
法向量的计算
[0068]
通过对数据的滤波去噪,得到点云数据集,从而直接计算点云中每个点的法面曲线。将估计表面法线的解决方案简化为对从点云数据集中任意一点ac(u,v)的最近邻近3d中心创建的协方差矩阵的特征向量和特征值表示。对于每个点ac,可以组成如下的协方差矩阵:
[0069][0070]
式中:c为协方差矩阵;k为在点ac附近相邻点的数目;ac为点云数据集中任意一点;为最近相邻点的3d中心;
[0071]
⑤
三维点云数据配准计算
[0072]
为寻找两个点集之间的最近点,采用icp算法进行配准,求得其欧式距离的平方和最小,从而计算出点云之间的刚体变换。其公式如下:
[0073][0074]
式中:f(q)为欧氏距离平方和的平均值;f(q)为平均值函数;xi={x1,x2,
……
,xn}为任意一个点云集;pi={p1,p2,
……
,pn}为任意一个点云集;qr为最优旋转变换的单位特征向量;r
(qr)
为刚体变换的旋转矩阵;q
t
为刚体变换平移向量。
[0075]
将所得到的法向量和配准后的点云数据进行网格重建,即可输出相应t梁图像三维重建模型。
[0076]
图像采集单元3用于实时第一浇筑振捣层51的分层浇筑量的图像,并将采集到的分层浇筑量的图像传输给集成控制器2;
[0077]
集成控制器2用于接收分层浇筑量的图像,对分层浇筑量的图像进行模/数转换,之后将转换结果与t梁图像三维重建模型中对应的第一浇筑振捣层51中的混凝土浇筑量进行对比,根据对比结果为给料器4发送给料工作指令;若判断已达到第一浇筑振捣层51规定的混凝土浇筑量,则为给料器4发送停止给料工作指令,若判断未达到第一浇筑振捣层51规定的混凝土浇筑量,则为给料器4发送继续给料工作指令,直至达到第一浇筑振捣层51规定的混凝土浇筑量,发送停止给料工作指令;
[0078]
给料器4根据集成控制器2发送的给料工作指令继续给料作业或停止给料作业;
[0079]
待给料作业完成后,图像采集单元3用于实时采集t梁5的分层振捣目标高度的图像和分层振捣平整度的图像,并将采集的分层振捣目标高度的图像和分层振捣平整度的图
像传输给集成控制器2;
[0080]
集成控制器2用于接收分层振捣目标高度的图像和分层振捣平整度的图像,对分层振捣目标高度的图像和分层振捣平整度的图像进行模/数转换,并将转换结果与t梁图像三维重建模型中对应层级的分层振捣目标高度和分层振捣平整度进行对比,根据对比结果为振捣器1发送振捣工作指令;若判断已达到第一浇筑振捣层51要求的分层振捣目标高度和分层振捣平整度,则为振捣器1发送停止振捣作业工作指令,若判断未达到第一浇筑振捣层51要求的分层振捣目标高度和分层振捣平整度,则发送继续振捣作业指令,直至完成第一浇筑振捣层51的振捣作业,发送停止振捣工作指令;
[0081]
振捣器1根据集成控制器2发送的振捣工作指令继续振捣作业或停止振捣作业;
[0082]
依次类推,直至完成第二浇筑振捣层53和第三浇筑振捣层55的浇筑、振捣作业,即完成整个t梁5的浇筑、振捣作业。
[0083]
实施例2
[0084]
参见图2,本实施例t梁生产的分层自动给料控制方法,其是在实施例的t梁生产的分层自动给料控制系统上形成的,具体包括以下步骤:
[0085]
1)在集成控制器2内生成t梁图像三维重建模型;
[0086]
1.1)图像采集单元3采集t梁5的三维结构图像,并将t梁5的三维结构图像传输给集成控制器2;
[0087]
1.2)集成控制器2接收t梁5的三维结构图像,将t梁5的三维结构图像转换为t梁图像三维重建模型并对t梁图像三维重建模型进行储存。
[0088]
具体为t梁图像三维重建模型建立过程如下:
[0089]
①
多视角深度图像获取:参见图3,利用图像采集单元3对t梁5进行拍摄,以t梁任意角点前倾斜45
°
方向距离l
㎝
(l的取值范围为400
㎝‑
500
㎝
)的位置作为摄站1(拍摄点1),拍摄照片记为f1,以摄站1为基准点顺时针45
°
方向布置摄站2(拍摄点2),拍摄照片记为f2,以此类推,指导布置至摄站8(拍摄点8),通过8个摄站,获得t梁5不通过角度的图像;
[0090]
②
图像转化,参见图4,a(u,v)为图像坐标下的任意一点,通过坐标转换公式(1)将深度图像转换成点云坐标ac(x
ω
,y
ω
,z
ω
),
[0091][0092][0093]
[0094]
式中:u、v为图像坐标系下的a点坐标;u0、v0分别为a点所在照片图像中的中心坐标;x
ω
、y
ω
、z
ω
为点云数据下的三维坐标点;f为相机焦距;zc为t梁5的摄站到相机的距离,r为3
×
3旋转矩阵,t为3
×
1平移矩阵。
[0095]
利用公式(1)、公式(2)以及公式(3)完成所拍摄t梁5照片所有图像点的坐标转换,形成点云数据。
[0096]
③
滤波去噪
[0097]
采用双边滤波来改善点云数据中噪声的影响,将图3上任意两点ac(u,v),b(k,l)代入双边滤波公式:
[0098][0099]
式中:ω(u,v,k,l)为加权系数;g(u,v)为输出图像值;f(k,l)为原始图形二维图像值;u、v为第一个像素点a的坐标;k、l为第二个像素点b的坐标。
[0100]
④
法向量的计算
[0101]
通过对数据的滤波去噪,得到点云数据集,从而直接计算点云中每个点的法面曲线。将估计表面法线的解决方案简化为对从点云数据集中任意一点ac(u,v)的最近邻近3d中心创建的协方差矩阵的特征向量和特征值表示。对于每个点ac,可以组成如下的协方差矩阵:
[0102][0103]
式中:c为协方差矩阵;k为在点ac附近相邻点的数目;ac为点云数据集中任意一点;为最近相邻点的3d中心;
[0104]
⑤
三维点云数据配准计算
[0105]
为寻找两个点集之间的最近点,采用icp算法进行配准,求得其欧式距离的平方和最小,从而计算出点云之间的刚体变换。其公式如下:
[0106][0107]
式中:f(q)为欧氏距离平方和的平均值;f(q)为平均值函数;xi={x1,x2,
……
,xn}为任意一个点云集;pi={p1,p2,
……
,pn}为任意一个点云集;qr为最优旋转变换的单位特征向量;r
(qr)
为刚体变换的旋转矩阵;q
t
为刚体变换平移向量。
[0108]
2)通过图像采集单元3实时第一浇筑振捣层51的分层浇筑量的图像,并将采集到的分层浇筑量的图像传输给集成控制器2;
[0109]
3)集成控制器2接收分层浇筑量的图像,对分层浇筑量的图像进行模/数转换,之后将转换结果与t梁图像三维重建模型中对应的第一浇筑振捣层51中的混凝土浇筑量进行对比,根据对比结果为给料器4发送给料工作指令;若判断已达到第一浇筑振捣层51规定的混凝土浇筑量,则为给料器4发送停止给料工作指令,若判断未达到第一浇筑振捣层51规定的混凝土浇筑量,则为给料器4发送继续给料工作指令,直至达到第一浇筑振捣层51规定的混凝土浇筑量,发送停止给料工作指令;
[0110]
4)给料器4根据集成控制器2发送的给料工作指令继续给料作业或停止给料作业;
[0111]
5)待给料作业完成后,通过图像采集单元3实时采集t梁5的分层振捣目标高度的图像和分层振捣平整度的图像,并将采集的分层振捣目标高度的图像和分层振捣平整度的图像传输给集成控制器2;
[0112]
6)集成控制器2接收分层振捣目标高度的图像和分层振捣平整度的图像,对分层振捣目标高度的图像和分层振捣平整度的图像进行模/数转换,并将转换结果与t梁图像三维重建模型中对应层级的分层振捣目标高度和分层振捣平整度进行对比,根据对比结果为振捣器1发送振捣工作指令;若判断已达到第一浇筑振捣层51要求的分层振捣目标高度和分层振捣平整度,则为振捣器1发送停止振捣作业工作指令,若判断未达到第一浇筑振捣层51要求的分层振捣目标高度和分层振捣平整度,则发送继续振捣作业指令,直至完成第一浇筑振捣层51的振捣作业,发送停止振捣工作指令;
[0113]
7)振捣器1根据集成控制器2发送的振捣工作指令继续振捣作业或停止振捣作业;
[0114]
依次类推,直至完成第二浇筑振捣层53和第三浇筑振捣层55的浇筑、振捣作业,即完成整个t梁5的浇筑、振捣作业。
[0115]
需要说明的是,本发明的t梁生产的分层自动给料控制系统以及t梁生产的分层自动给料控制方法中,均可以将t梁5自下而上依次并列设置成2层、3层、4层、5层,甚至更多层。图像采集单元3为相机;给料器4为混凝土泵机。本发明中集成控制器2为市场上售卖的常规产品,其型号为云科pci-7315。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1