一种墙壁抹灰装置行走平衡底座的制作方法
1.一种墙壁抹灰装置行走平衡底座,用于在移动墙壁抹灰装置的过程中自动保持墙壁抹灰装置处于水平状态,属于墙壁抹灰装置制造技术领域。
背景技术:
2.在对墙壁进行抹灰发展历程中,以前是泥水工手工进行抹灰,这种方式劳动强度大,并且效率还低,因此,出现了很多的抹灰机器人,诸如,公布号为cn110439225a,名称为:一种抹灰机器人的实用新型专利中,采用的技术方案为:
3.一种抹灰机器人,包括移动单元、升降单元、抹灰组件,移动单元包括车体、多个麦克纳姆轮,车体的两侧壁向内凹陷形成有多个车轮安装槽,所述车轮安装槽的底部与外界相连通,所述车轮安装槽远离车体的一侧与外界相连通;优选的,车轮安装槽的数量为八个,麦克纳姆轮与所述车轮安装槽一一对应设置,麦克纳姆轮部分内置于所述车轮安装槽,麦克纳姆轮的底部凸出于所述车轮安装槽,且麦克纳姆轮可转动连接于车体;优选的麦克纳姆轮的数量为八个,升降单元固定于移动单元,且升降单元的输出可相对地面垂直升降,升降单元可以为电动推杆、气缸、液压缸、也可以为电机加丝杆螺母副;优选的,升降单元包括丝杆、电机、螺母、至少一个导向轴,丝杆竖直设置,且丝杆的一端可转动连接于车体;电机的输出端连接于丝杆,用于驱动丝杆绕自身轴线转动;螺母配合套设于丝杆的另一端;导向轴与丝杆相互平行设置,且导向轴的一端连接于车体;优选的,导向轴的数量为三个,升降单元还包括第一皮带轮、第二皮带轮、第一皮带,第一皮带轮固定套设于丝杆,第二皮带轮固定套设于电机的输出轴,第一皮带的一端配合套设于第一皮带轮、另一端配合套设于第二皮带轮。
4.该技术方案采用了麦克纳姆轮作为机器的移动装置,但是其需要在平坦的地面才能使用;一般情况下,对建筑物的墙壁进行抹灰时,建筑物的周围的地面还没有进行铺平,因此,这限制了抹灰机器人的使用场景。
5.而公告号为cn210622245u,名称为:抹灰机器人的实用新型,采用的方案为:抹灰机器人的一种具体构造,包括移动底座、支撑立柱单元及作业执行机构,移动能力强、稳定性佳,实现于建筑工地的快速自主移动。支撑立柱单元设置于移动底座上,作业执行机构可升降运动地保持于支撑立柱单元上而执行对墙面的抹灰作业;移动底座包括底座本体及多个自动力支撑脚。该多个自动力支撑脚的数量至少为三个,即第一自动力支撑脚、第二自动力支撑脚及第三自动力支撑脚。第一自动力支撑脚、第二自动力支撑脚及第三自动力支撑脚环形设置并用于共同支撑底座本体,形成一可靠连接的整体结构,使移动底座于各种地面上均能保持稳定及实现对支撑立柱单元的可靠支撑;各自动力支撑脚远离底座本体的一端均设有全向轮及用于驱动全向轮转动的驱动源。于驱动源的驱动下,全向轮得以转动地保持于地面上,使移动底座获得自主移动能力而无需人工推移。由于每一个自动力支撑脚上均设有全向轮,移动底座具有至少三个支撑脚及至少三个全向轮,可于各种地面上实现灵活的全向移动,即使在凹凸不平的建筑地面上仍能快速灵活移动。该方案虽然使得抹灰
机器人在凹凸不平的建筑地面上仍能快速灵活移动,但是在抹灰机器人移动过程中,机器人上的作业执行机构的水平度会发生改变,导致移动后墙上的抹灰厚度不均匀,因此,需要设计出一种能够全方位移动、并能随时刹车,且不影响作业执行机构的水平度的抹灰机器人出现,以解决上述问题。
技术实现要素:
6.本实用新型的目的是针对现有技术的缺点,采用在底座本体后端转动设置横梁以配合万向轮,并在底座本体前端设有可自动伸缩的横滚轮的方式,设计了一种能够在墙壁抹灰装置在凹凸地面行走过程中不影响作业执行机构的水平度,同时能够调整抹灰机器人在x轴方向和y轴方向移动的平衡底座,解决了现有的用于抹灰装置的底座在凹凸不平的地面移动时,对抹灰装置上的作业执行机构的水平度影响很大,导致调整和校准作业执行机构的时间长的问题。
7.为解决以上技术问题,本实用新型采用的技术方案如下:
8.一种墙壁抹灰装置行走平衡底座,包括底座本体,所述底座本体的下表面的前端两侧分别设有前滚轮,所述底座本体的下表面的后端通过垂直于所述前滚轮的轴线的横轴转动连接有横梁,所述横梁平行于所述前滚轮的轴线,所述横轴位于所述横梁的几何中心处,所述横梁的两端在背向所述底座本体的一侧设有万向轮,所述底座本体上设有横梁转动限位结构,所述底座本体上在垂直于所述前滚轮的轴线的中心线上设有贯穿底座本体的竖直通道,所述竖直通道内滑动连接有连接机构,所述连接机构的下端通过轮座设有横滚轮,所述横滚轮的轴线与所述前滚轮的轴线垂直,所述底座本体的上表面设有用于控制所述连接机构在所述竖直通道内纵向移动的伸缩控制机构。
9.在本实用新型中,将抹灰装置固定安装于底座本体上,在需要移动抹灰装置时,只需推动抹灰装置,便可使抹灰装置移动,如果在底座本体后端的一个万向轮遇到地面障碍物时(如砂粒,小石块),由于安装万向轮的横梁是铰接在底座本体的后端中点处的,因此,横梁会出现一端上升,但是横梁的中心位置只上升障碍物高度的二分之一高度,因此,影响较小,同时,即使需要调整作业执行机构水平度,其调整范围也缩小,减少调整校准时间,从而提高工作效率,而当需要使抹灰装置横向运动时,只需通过伸缩控制机构控制连接机构在竖直通道内伸出底座本体的下表面,使横滚轮将底座本体的前端支撑起来,横向推动抹灰装置即可,当底座本体后端的一个万向轮遇到地面凹陷时,横梁的底端相对底座本体下降,另一端相对底座本体上升,使得横梁相对底座本体上升一端顶住横梁转动限位结构,底座本体上的两个前滚轮和一个万向轮支撑住底座本体,使得底座本体不会歪倒,同时,底座本体发生的倾斜度比较小,仅是横梁相对底座本体上升端上升的距离的一半,本实用新型采用在底座本体后端转动设置横梁以配合万向轮,并在底座本体前端设有可自动伸缩的横滚轮的方式,设计了一种能够在墙壁抹灰装置在凹凸地面行走过程中不影响作业执行机构的水平度,同时能够调整抹灰机器人在x轴方向和y轴方向移动的平衡底座,解决了现有的用于抹灰装置的底座在凹凸不平的地面移动时,对抹灰装置上的作业执行机构的水平度影响很大,导致调整和校准作业执行机构的时间长的问题。
10.作为一种优选的方式,连接机构为连接在所述轮座背面的n型杆,所述n型杆的底端与所述轮座连接。
11.作为一种优选的方式,所述伸缩控制机构包括第一伸缩杆、支撑杆、横杆,所述支撑杆竖直设于所述底座本体的上表面上远离所述竖直通道处,所述横杆平行于所述支撑杆与所述竖直通道之间的连线,且横杆的两端之间与所述支撑杆的顶端铰接,所述横杆背向所述竖直通道的一端与所述的第一伸缩杆的顶端铰接,所述横杆的另一端轴向设有与所述n型杆顶端配合的短槽口,所述n型杆的横向部分与所述短槽口滑动连接。
12.所述伸缩控制机构包括第一伸缩杆,所述第一伸缩设于所述底座本体的上表面且顶端连接所述n型杆的横向部分的中点。
13.作为一种优选的方式,所述底座本体上在对应每个所述前滚轮的上方设有刹车装置。
14.作为一种优选的方式,所述刹车装置包括第二伸缩杆,所述第二伸缩杆倒设于所述底座本体的上表面,所述第二伸缩杆的顶端贯穿所述底座本体,所述第二伸缩杆的顶端在所述底座本体下方固定连接有与所述滚轮配合的弧形刹车片。
15.作为一种优选的方式,所述弧形刹车片的弧形的圆心与所述滚轮的圆心重合,所述弧形刹车片的弧形内径等于所述前滚轮的直径,所述弧形刹车片的弧形对应的弦长小于所述滚轮的直径,所述弧形刹车片的圆心角小于度。
16.作为一种优选的方式,所述横梁转动限位结构包括贯穿所述底座本体的上下表面的长槽口,所述横梁位于所述长槽口内,所述长槽口的长和宽大于所述横梁的长和宽,所述底座本体的上表面上在位于所述长槽口处设有横截面为n型的横条,所述横条平行于所述槽口,所述横条的n型开口大于所述长槽口的宽度。
17.作为一种优选的方式,所述横条的长度大于或等于所述长槽口的长度。
18.作为一种优选的方式,所述横条的长度等于所述长槽口的长度。
19.与现有技术相比,本实用新型的有益效果是:
20.(1)本实用新型采用在底座本体后端转动设置横梁以配合万向轮,并在底座本体前端设有可自动伸缩的横滚轮的方式,设计了一种能够在墙壁抹灰装置在凹凸地面行走过程中不影响作业执行机构的水平度,同时能够调整抹灰机器人在x轴方向和y轴方向移动的平衡底座,解决了现有的用于抹灰装置的底座在凹凸不平的地面移动时,对抹灰装置上的作业执行机构的水平度影响很大,导致调整和校准作业执行机构的时间长的问题。
21.(2)本实用新型将连接机构设置为n型杆,方便与控制n型杆在竖直通道内移动的伸缩控制机构,同时,n型杆的设计,使得轮座的背面受到的拉力或推力分布开,避免轮座由于局部应力而发生变形。
22.(3)本实用新型中的横杆平行于所述支撑杆与所述竖直通道之间的连线,且横杆的两端之间与所述支撑杆的顶端铰接,所述横杆背向所述竖直通道的一端与所述第一伸缩杆的顶端铰接,所述横杆的另一端轴向设有与所述n型杆顶端配合的短槽口,所述n型杆的横向部分与所述短槽口滑动连接,由于横杆将n型杆网上拉的过程中,n型杆的横向部分与横杆的连接部分会发生移动。
23.(4)本实用新型中的横杆上背向所述第一伸缩杆的一端到横杆与支撑杆铰接处的距离小于所述横杆上第一伸缩杆与横杆铰接处到横杆与支撑杆铰接处的距离,使得在通过第一伸缩杆施力将底座本体的前端抬起的过程中,横杆上在第一伸缩杆施力的一端形成的力矩大于 n型杆与横杆连接一端形成的力矩,从而使得在制造过程中扩大了第一伸缩杆的
选型范围,使得第一伸缩杆不需要特别选取功率大的。
附图说明
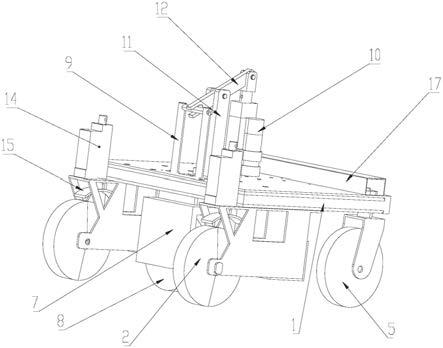
24.图1为本实用新型的结构示意图;
25.图2为本实用新型中万向轮与横梁以及横轴之间的连接关系图;
26.图3为本实用新型中拆除n型杆的结构示意图;
27.图4为本实用新型中n型杆与轮座以及横滚轮的连接关系图;
28.图5为本实用新型中实施例3的结构示意图。
29.其中,1、底座本体;2、前滚轮;3、横轴;4、横梁;5、万向轮;6、竖直通道;7、轮座;8、横滚轮;9、n型杆;10、第一气缸;11、支撑杆;12、横杆;13、短槽口;14、第二气缸;15、弧形刹车片;16、长槽口;17、横条;18、z型限位板;18
‑
1、底面水平板;18
‑
2、顶面水平板;19、螺栓组件。
具体实施方式
30.实施例1
31.如图1
‑
4所示,一种墙壁抹灰装置行走平衡底座,包括底座本体1,所述底座本体1的下表面的前端两侧分别设有前滚轮2,所述底座本体1的下表面的后端通过垂直于所述前滚轮2的轴线的横轴3转动连接有横梁4,所述横梁4平行于所述前滚轮2的轴线,所述横轴 3位于所述横梁4的几何中心处,所述横梁4的两端在背向所述底座本体1的一侧设有万向轮5,所述底座本体1上设有横梁转动限位结构,底座本体1上在垂直于所述前滚轮2的轴线的中心线上设有贯穿底座本体1的竖直通道6,所述竖直通道6内滑动连接有连接机构,所述连接机构的下端通过轮座7设有横滚轮8,所述横滚轮8的轴线与所述前滚轮2的轴线垂直,所述底座本体1的上表面设有用于控制所述连接机构在所述竖直通道6内纵向移动的伸缩控制机构。
32.在本实施例中,将抹灰装置固定安装于底座本体1上,在需要移动抹灰装置时,只需推动抹灰装置,便可使抹灰装置移动,如果在底座本体1后端的一个万向轮5遇到地面障碍物时(如砂粒,小石块),由于安装万向轮5的横梁4是铰接在底座本体1的后端中点处的,因此,横梁4会出现一端上升,但是横梁4的中心位置只上升障碍物高度的二分之一,因此,影响较小,同时,即使需要调整作业执行机构水平度,其调整范围也缩小,减少调整校准时间,从而提高工作效率,而当需要使抹灰装置横向运动时,只需通过伸缩控制机构控制连接机构在竖直通道6内伸出底座本体1的下表面,使横滚轮8将底座本体1的前端支撑起来,横向推动抹灰装置即可,当底座本体1后端的一个万向轮5遇到地面凹陷时,横梁4的底端相对底座本体1下降,另一端相对底座本体1上升,使得横梁4相对底座本体1上升一端顶住横梁转动限位结构,底座本体1上的两个前滚轮2和一个万向轮5支撑住底座本体1,使得底座本体1不会歪倒,同时,底座本体1发生的倾斜度比较小,仅是横梁4相对底座本体 1上升端上升的距离的一半,本实用新型采用在底座本体1后端转动设置横梁4以配合万向轮5,并在底座本体1前端设有可自动伸缩的横滚轮的方式,设计了一种能够在墙壁抹灰装置在凹凸地面行走过程中不影响作业执行机构的水平度,同时能够调整抹灰机器人在x轴方向和y轴方向移动的平衡底座,解决了现有的用于抹灰装置的底座在凹凸不平的地面移动时,对抹灰
装置上的作业执行机构的水平度影响很大,导致调整和校准作业执行机构的时间长的问题。
33.实施例2
34.如图1
‑
4所示,一种墙壁抹灰装置行走平衡底座,包括底座本体1,所述底座本体1的下表面的前端两侧分别设有前滚轮2,所述底座本体1的下表面的后端通过垂直于所述前滚轮2的轴线的横轴3转动连接有横梁4,所述横梁4平行于所述前滚轮2的轴线,所述横轴 3位于所述横梁4的几何中心处,所述横梁4的两端在背向所述底座本体1的一侧设有万向轮5,所述底座本体1上设有横梁4转动限位结构,底座本体1上在垂直于所述前滚轮2的轴线的中心线上设有贯穿底座本体1的竖直通道6,所述竖直通道6内滑动连接有连接机构,所述连接机构的下端通过轮座7设有横滚轮8,所述横滚轮8的轴线与所述前滚轮2的轴线垂直,所述底座本体1的上表面设有用于控制所述连接机构在所述竖直通道6内纵向移动的伸缩控制机构。
35.优选的,连接机构为连接在所述轮座7背面的n型杆9,所述n型杆9的底端与所述轮座7连接,设置的n型杆9,方便与控制n型杆9在竖直通道6内移动的伸缩控制机构,同时,n型杆9的设计,使得轮座7的背面受到的拉力或推力分布开,避免轮座7由于局部应力而发生变形。
36.优选的,所述伸缩控制机构包括第一伸缩杆10、支撑杆11、横杆12,所述支撑杆11 竖直设于所述底座本体1的上表面上远离所述竖直通道6处,所述横杆12平行于所述支撑杆11与所述竖直通道6之间的连线,且横杆12的两端之间与所述支撑杆11的顶端铰接,所述横杆12背向所述竖直通道6的一端与所述的第一伸缩杆10的顶端铰接,所述横杆12 的另一端轴向设有与所述n型杆9顶端配合的短槽口13,所述n型杆9的横向部分与所述短槽口13滑动连接,由于横杆12将n型杆9网上拉的过程中,n型杆9的横向部分与横杆12 的连接部分会发生移动,因此,设计了短槽口13。
37.优选的,所述横杆12上背向所述第一伸缩杆10的一端到横杆12与支撑杆11铰接处的距离小于所述横杆12上第一伸缩杆10与横杆12铰接处到横杆12与支撑杆11铰接处的距离,使得在通过第一伸缩杆10施力将底座本体1的前端抬起的过程中,横杆12上在第一伸缩杆10施力的一端形成的力矩大于n型杆9与横杆12连接一端形成的力矩,从而使得在制造过程中扩大了第一伸缩杆10的选型范围,使得第一伸缩杆10不需要特别选取功率大的。
38.优选的,所述底座本体1上在对应每个所述前滚轮2的上方设有刹车装置。
39.优选的,所述刹车装置包括第二伸缩杆14,所述第二伸缩杆14倒设于所述底座本体1 的上表面,所述第二伸缩杆14的顶端贯穿所述底座本体1,所述第二伸缩杆14的顶端在所述底座本体1下方固定连接有与所述滚轮配合的弧形刹车片15,使得在移动底座本体1之后,可以通过刹车片15刹车,避免底座本体1再发生移动。
40.优选的,所述弧形刹车片15的弧形的圆心与所述滚轮的圆心重合,所述弧形刹车片15 的弧形内径等于所述前滚轮的直径,所述弧形刹车片15的弧形对应的弦长小于所述滚轮的直径,所述弧形刹车片15的圆心角小于180度,使得刹车片15与前滚轮2的圆周面的接触面积增大,从而增大摩擦力,使刹车敏捷,减少弧形刹车片15的磨损。
41.优选的,所述横梁4转动限位结构包括贯穿所述底座本体1的上下表面的长槽口16,所述横梁4位于所述长槽口16内,所述长槽口16的长和宽大于所述横梁4的长和宽,所述
底座本体1的上表面上在位于所述长槽口16处设有横截面为n型的横条17,所述横条17平行于所述槽口,所述横条17的n型开口大于所述长槽口16的宽度,使得横梁4的下表面与底座本体1的下表面齐平,避免底座本体1移动过程中,横梁4被异物刮到。
42.优选的,所述横条17的长度大于或等于所述长槽口16的长度,使得横条17能够缩小住横梁4端部上升的最大距离,从而避免横梁4的端部移动的距离太大,导致在调整和校准作业执行机构的时间过长。
43.优选的,所述横条17的长度等于所述长槽口16的长度,使得制作过程中节约横条17 的制作材料。
44.特别说明:第一伸缩杆10和第二伸缩杆14均可选取气压伸缩杆、液压伸缩杆、电动推杆中的一种。
45.实施例3
46.如图5所示,一种墙壁抹灰装置行走平衡底座,包括底座本体1,所述底座本体1的下表面的前端两侧分别设有前滚轮2,所述底座本体1的下表面的后端通过垂直于所述前滚轮 2的轴线的横轴3转动连接有横梁4,所述横梁4平行于所述前滚轮2的轴线,所述横轴3 位于所述横梁4的几何中心处,所述横梁4的两端在背向所述底座本体1的一侧设有万向轮 5,所述底座本体1上设有横梁4转动限位结构,底座本体1上在垂直于所述前滚轮2的轴线的中心线上设有贯穿底座本体1的竖直通道6,所述竖直通道6内滑动连接有连接机构,所述连接机构的下端通过轮座7设有横滚轮8,所述横滚轮8的轴线与所述前滚轮2的轴线垂直,所述底座本体1的上表面设有用于控制所述连接机构在所述竖直通道6内纵向移动的伸缩控制机构。
47.所述连接机构为连接在所述轮座7背面的n型杆9,所述n型杆9的底端与所述轮座7 连接。
48.所述伸缩控制机构包括第一伸缩杆10,所述第一伸缩杆10设于所述底座本体1的上表面且顶端连接所述n型杆9的横向部分的中点。
49.所述横梁转动限位结构包括至少两个z型限位板18、至少两个限位螺栓组件19,所述z 型限位板18的底面水平板18
‑
1与所述底座本体1的上表面固定连接,z型限位板18的顶面水平板18
‑
2伸出所述底座本体1的后端外且位于所述横梁4的端部与横梁4的中点之间的上方,所述顶面水平板18
‑
2上设有竖直的通孔以及贯穿所述通孔的所述螺栓组件19,通过调节所述限位螺栓组件19中的螺栓伸出所述的顶面水平板18
‑
2的下表面的长度来进行限位调整,以致于能够根据实际应用场景,更改横梁4能够围绕横轴3转动的角度范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1