装配式建筑外墙用条板挂装机器人的制作方法
1.本实用新型涉及一种装配式建筑施工装备,具体是一种装配式建筑外墙用条板挂装机器人。
背景技术:
2.装配式建筑是近几年迅速发展的绿色建筑方法,是国家大力提倡的一种施工工法。装配式建筑是一种统称,其中一种装配式建筑是在现场用刚接搭建框架,然后将预制的条板铺设到每层的地面和外侧面上,从而形成每层的地板和墙。目前,外墙用条板的挂装方法是:在楼顶架设起重机或者电葫芦,人工将外墙用条板从楼的外面的地面上,一个一个的吊起来挂到每层的外墙面上,效率特别地下,而且危险系数极高。本实用新型所公开的装配式建筑外墙用条板挂装方法及机器人,要求工人将外墙用条板先吊装到每层的地板上,然后使用机器人逐个外挂,效率大大提高,且安全性高,可以多个楼层同时施工,相互不影响,大大缩短工期,极具工程实用价值。
技术实现要素:
3.本实用新型的目的正是针对上述问题而提供的装配式建筑外墙用条板挂装机器人,可以实现每一层都同时作业施工,效率提高近10倍,高效快捷。
4.本实用新型的目的可通过下述技术措施来实现:
5.所述装配式建筑外墙用条板挂装机器人主要由地轨1、机器人2、夹具3和控制系统4构成;所述地轨1固定在地板上,所述机器人2固定在地轨1上的滑台上,并可沿着地轨1的长度方向移动,动力来自电机;所述机器人2的轴数不低于五轴;所述夹具3固定在机器人2的末端,利用吸、抱、夹其中的一种方式或至少其中的两种方式的组合对外墙用条板0进行抓取工作;工人操作所述控制系统4使机器人2变换姿态并完成如下工作:
6.step1工人操作控制系统4中的手柄41,使机器人2末端的夹具3移动到底板上堆放的外墙用条板0上方;
7.step2工人操作控制系统4中的手柄41,使机器人2末端的夹具3抓取底板上堆放的最上面一个外墙用条板0;
8.step3工人操作控制系统4中的手柄41,使机器人2根据实际需要变化各种姿态,抓住外墙用条板0并将其从墙壁内侧移动到墙壁外侧;
9.step4工人操作控制系统4中的手柄41,使机器人2抓住外墙用条板0调整角度,放到指定的位置;
10.step5工人将外墙用条板0固定到装配式建筑的框架00上;
11.step6工人操作控制系统4中的手柄41,使机器人2复位或抓取下一个外墙用条板0;
12.step7待一面墙装完,工人将所述装配式建筑外墙用条板挂装机器人移动到另外一面墙的内侧附近,重复step1至step6;
13.关键步骤step1至step7构成外墙用条板挂装方法。
14.本实用新型的有益效果如下:
15.采用本实用新型所述装配式建筑外墙用条板挂装方法及机器人,相比传统作业方式,实现柔性吊装,可以每层楼同时施工,提高了效率,特别适用于装配式建筑的外墙板的挂装作业,具备新颖性和创造性,极具推广价值。
附图说明
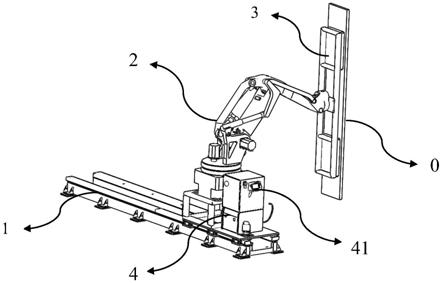
16.图1所示为所述装配式建筑外墙用条板挂装机器人整体结构示意图;
17.图2—图8所示为装配式建筑外墙用条板挂装方法,各个步骤中装配式建筑外墙用条板挂装机器人的姿态示意图;
18.图中序号:1地轨,2机器人,3夹具,4控制系统,41手柄,0外墙用条板,00框架。
具体实施方式
19.如图1所示,所述装配式建筑外墙用条板挂装机器人主要由地轨1、机器人2、夹具3和控制系统4构成;所述地轨1固定在地板上,所述机器人2固定在地轨1上的滑台上,并可沿着地轨1的长度方向移动,动力来自电机;所述机器人2的轴数不低于五轴;所述夹具3固定在机器人2的末端,利用吸、抱、夹其中的一种方式或至少其中的两种方式的组合对外墙用条板0进行抓取工作;工人操作所述控制系统4使机器人2变换姿态并完成如下工作:
20.step1工人操作控制系统4中的手柄41,使机器人2末端的夹具3移动到底板上堆放的外墙用条板0上方(如图8所示);
21.step2工人操作控制系统4中的手柄41,使机器人2末端的夹具3抓取底板上堆放的最上面一个外墙用条板0(如图2和图3所示);
22.step3工人操作控制系统4中的手柄41,使机器人2根据实际需要变化各种姿态,抓住外墙用条板0并将其从墙壁内侧移动到墙壁外侧(如图4、图5、图6所示);
23.step4工人操作控制系统4中的手柄41,使机器人2抓住外墙用条板0调整角度,放到指定的位置(如图7所示);
24.step5工人将外墙用条板0固定到装配式建筑的框架00上;
25.step6工人操作控制系统4中的手柄41,使机器人2复位或抓取下一个外墙用条板0;
26.step7待一面墙装完,工人将所述装配式建筑外墙用条板挂装机器人移动到另外一面墙的内侧附近,重复step1至step6;
27.关键步骤step1至step7构成外墙用条板挂装方法。
28.本实用新型的有益效果如下:
29.采用本实用新型所述装配式建筑外墙用条板挂装机器人,相比传统作业方式,实现柔性吊装,可以每层楼同时施工,提高了效率,特别适用于装配式建筑的外墙板的挂装作业,具备新颖性和创造性,极具推广价值。
技术特征:
1.装配式建筑外墙用条板挂装机器人,其特征在于:所述装配式建筑外墙用条板挂装机器人主要由地轨(1)、机器人(2)、夹具(3)和控制系统(4)构成;所述地轨(1)固定在地板上,所述机器人(2)固定在地轨(1)上的滑台上,并可沿着地轨(1)的长度方向移动,动力来自电机;所述机器人(2)的轴数不低于五轴;所述夹具(3)固定在机器人(2)的末端,利用吸、抱、夹其中的一种方式或至少其中的两种方式的组合对外墙用条板(0)进行抓取工作;工人操作所述控制系统(4)使机器人(2)变换姿态并完成外墙用条板的挂装工作。
技术总结
本实用新型公开了一种装配式建筑外墙用条板挂装机器人。所述装配式建筑外墙用条板挂装机器人主要由地轨、机器人、夹具和控制系统构成。工人将条板吊运到各个楼层房间的底板上,根据实际,工人将所述装配式建筑外墙用条板挂装机器人移动到靠墙侧,操作机器人逐个抓取条板,使用操作手柄将该条板搬运到指定位置,调整好角度,最后由工人使用螺栓将条板固定在装配式建筑的框架上。相比传统作业方式,实现柔性吊装,可以每层楼同时施工作业,大大节省时间,降低工人劳动强度,提高了效率,特别适用于装配式建筑的外墙板的挂装作业,具备新颖性和创造性。颖性和创造性。颖性和创造性。
技术研发人员:刘晓宇 孙永胜
受保护的技术使用者:郑州弗曼智能设备科技有限公司
技术研发日:2021.08.24
技术公布日:2022/1/11
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1