一种用于立体车库取停车的侧向搬运装置和搬运方法
1.本发明涉及立体车库技术领域,具体地说是一种用于立体车库取停车的侧向搬运装置和搬运方法。
背景技术:
2.目前在深井立体车库中普遍使用的是侧向插齿搬运系统,现有的侧向插齿搬运系统主要存在以下缺陷:1.侧向插齿搬运系统要求每个停车位都有一个停车板,停车板带动力机构,投资成本高;停车板通过滑触取电从而实现往返移动,滑触线有断点、不连续,导致停车板的故障率高;2.传统侧向插齿搬运系统不能适应各种车轮间距和车轮大小的车辆,适配性较低;停车板没有对中机构,无法对车辆进行二次对中,车辆搬运过程中平衡性差,速度慢,安全性差;3. 侧向插齿搬运系统无法提供一套完整的应对不同轴距、不同宽度、不同车轮大小的车辆的取停车方案。
3.因此,急需一种用于立体车库取停车的侧向搬运装置和搬运方法,来适应不同车辆的存取车需求。
技术实现要素:
4.本发明要解决的技术问题是针对上述现有技术的不足,而提供一种用于立体车库取停车的侧向搬运装置和搬运方法,该装置使用变距机构和伸缩机构调整移动车蹲的位置,来适配不同车身长度、宽度车辆车轮的位置,通过子母车机构组合搬运车辆,将车辆从中心升降平台搬运至目标平台上。
5.为解决上述技术问题,本发明采用的技术方案是:一种用于立体车库取停车的侧向搬运装置,包括目标车位平台、中心升降平台、变距机构、传动机构、伸缩机构、母车机构、子车机构、对中机构和控制器。
6.定义车身长度方向为纵向,车身宽度方向为横向。
7.所述目标车位平台上布设有第一前轮固定蹲、第一后轮固定蹲、第一前轮移动蹲、第一后轮移动蹲和移动蹲滑轨。
8.所述移动蹲滑轨纵向嵌设在目标车位平台内,移动蹲滑轨的上端面与目标车位平台平齐;所述第一前轮移动蹲和第一后轮移动蹲布设在移动蹲滑轨上。
9.所述第一前轮固定蹲侧壁中心设有第一前轮固定蹲认址片。
10.所述第一前轮移动蹲布设有第一前轮移动蹲认址片,第一前轮移动蹲的侧壁中心开有第一前轮移动蹲认址孔;所述第一后轮移动蹲布设有第一后轮移动蹲认址片;第一后轮移动蹲的侧壁中心开有第一后轮移动蹲认址孔。
11.所述中心升降平台布设有第二前轮固定蹲、第二后轮固定蹲、第二前轮移动蹲、第
二后轮移动蹲和变距滑动导轨。
12.所述变距滑动导轨嵌设在中心升降平台内,上端面与中心升降平台平齐;所述第二前轮移动蹲和第二后轮移动蹲布设在变距滑动导轨上。
13.所述第二前轮移动蹲侧壁布设有第二前轮移动蹲认址片;第二前轮移动蹲侧壁中心开有第二前轮移动蹲认址孔;所述第二后轮移动蹲侧壁布设有第二后轮移动蹲认址片;第二后轮移动蹲侧壁中心开有第二后轮移动蹲认址孔;所述变距机构对称布设在中心升降平台上;所述变距机构包括变距电机、变距丝杠、变距丝杠轴承座、变距丝杠滑动螺母、固定板。
14.所述变距电机和变距丝杠轴承座固定在中心升降平台上;所述变距丝杠穿设在变距丝杠轴承座内,并通过传动机构与变距电机相连。
15.所述变距丝杠一端为变距丝杠光杆段,不设置螺纹;另一端为变距丝杠螺纹段,设置螺纹;变距丝杠螺纹段上套设有两个变距丝杠滑动螺母;所述变距丝杠滑动螺母的顶端布设有固定板。
16.所述变距丝杠螺纹段与变距丝杠光杆段连接的一端套设有变距丝杠轴承座,变距丝杠螺纹段另一端也套设有变距丝杠轴承座。
17.所述传动机构包括链轮、链条。
18.所述链轮分别套设在变距丝杠光杆段和变距电机输出轴上,链轮之间通过链条连接;在变距电机通过传动机构的驱动下,变距丝杠绕自身轴线转动,变距丝杠滑动螺母在变距丝杠螺纹段上沿轴线方向滑动,带动固定板移动。
19.所述伸缩机构与所述变距机构配套设置;每个所述伸缩机构包括伸缩电机、伸缩丝杠、伸缩丝杠轴承座、伸缩丝杠滑动螺母、伸缩机构滑动轨道、推力板和车蹲停位光电传感器。
20.所述伸缩电机和伸缩丝杠轴承座布设在固定板上。
21.所述伸缩丝杠中间段为伸缩丝杠光杆段,不设置螺纹;两侧为伸缩丝杠螺纹段,两个伸缩丝杠螺纹段上的螺纹旋向相反;所述伸缩丝杠光杆段穿设在伸缩丝杠轴承座内,与伸缩丝杠轴承座滑动配合连接;伸缩丝杠光杆段设置有链轮,两个伸缩丝杠螺纹段上分别套设有伸缩丝杠滑动螺母。
22.所述伸缩电机输出轴上也设置有链轮,所述伸缩电机的链轮与伸缩丝杠的链轮之间通过链条连接。
23.所述伸缩机构滑动轨道布设在固定板上;伸缩机构滑动轨道上布设有推力板;所述推力板与伸缩丝杠滑动螺母固定连接,并可在伸缩丝杠滑动螺母带动下,在伸缩机构滑动轨道自由滑动。
24.所述车蹲停位光电传感器固定在推力板端部。
25.所述母车机构包括母车底盘、母车驱动机构、子车返回认址片、母车电源机构、子车导向机构。
26.所述母车驱动机构布设在母车底盘上;所述母车驱动机构包括两对母车主动轮、两对母车从动轮、母车行走轴、母车行走电机。
27.所述母车主动轮、母车从动轮分别布设在母车底盘的四个角上;两对母车主动轮通过母车行走轴相连。
28.所述母车行走轴纵向布设在母车底盘上,并通过传动机构与母车行走电机相连。
29.所述母车电源机构布设在母车底盘上,与母车行走电机电性连接。
30.所述子车导向机构布设在母车底盘横向的两个侧边上,共布设有四个子车导向机构。
31.所述子车导向机构包括子车导向杆和导向座;所述导向座底部设有铰链,导向座固定在母车底盘上,与母车底盘转动连接;所述子车导向杆穿过导向座上设置的导向轴孔,连接至子车机构。
32.所述子车机构对称布设在母车机构上;每个所述子车机构包括子车底盘、子车抬升机构、子车驱动机构、停车定位光电传感器。
33.所述子车底盘与子车导向杆相连接固定。
34.所述子车抬升机构布设在子车底盘的四个角上;所述子车抬升机构包括螺杆升降机、抬升顶块和抬升电机;所述螺杆升降机底部固定在子车底盘上,与抬升电机相连,螺杆升降机顶部设置有抬升顶块。
35.所述子车驱动机构包括两对主巷道主动轮、两对主巷道从动轮、两对次巷道主动轮、两对次巷道从动轮、主巷道行走轴、次巷道行走轴和子车行走电机。
36.所述主巷道主动轮和主巷道从动轮与抬升顶块固定相连;两对主巷道主动轮之间通过主巷道行走轴相连接;所述次巷道主动轮和次巷道从动轮布设在子车底盘横向的两侧边上;两对次巷道主动轮之间通过次巷道行走轴相连接;所述主巷道行走轴和次巷道行走轴分别通过传动机构与子车行走电机相连。
37.所述子车机构还包括停车定位光电传感器;所述停车定位光电传感器布设在子车底盘的两个纵向侧边的中心位置,与所述子车返回认址片的位置对应;所述停车定位光电传感器和子车返回认址片与控制器电性连接。
38.所述对中机构与子车机构配套布设;所述对中机构包括对中导轨、直臂、导轨固定座、连接板、对中电机、圆锥滚子轴承、齿条、对中臂、行程控制传感器。
39.所述对中导轨横向对称布设;对中导轨内滑动配合布设有直臂,所述导轨固定座与对中导轨的下端面固定连接;所述导轨固定座固定在抬升顶块顶部;两根对中导轨间设有连接板,连接板上固定有对中电机;所述对中电机通过圆锥滚子轴承将对中电机的圆周运动转化为齿条的直线运动。
40.所述齿条与直臂平行布设,齿条与直臂通过对中臂连接固定;所述直臂端部设有行程控制传感器。
41.进一步优选地,所述中心升降平台中心位置还设有母车停位认址片。
42.进一步优选地,所述变距电机配套有变距电机编码器;所述伸缩电机配套有伸缩电机编码器;所述母车行走电机配套有母车行走电机编码器;所述子车行走电机配套有子车行走电机编码器;所述对中电机配套有对中电机编码器。所述变距电机编码器、伸缩电机编码器、母车行走电机编码器、子车行走电机编码器、对中电机编码器与控制器电性连接。
43.进一步优选地,所述母车机构还设置有存取车定位光电;所述存取车定位光电固定在母车底盘的中心位置,且朝向中心升降平台照射,与所述母车停位认址片对应布设;所述存取车定位光电与控制器电性连接。
44.进一步优选地,所述中心升降平台上还设置有充电板;所述母车机构上的母车电
源机构设有充电头;充电头与充电板匹配设置。
45.进一步优选地,所述母车机构的母车底盘纵向的两侧边中点位置设有尼龙止挡,用作子车机构回到母车机构时的物理限位阻挡。
46.进一步优选地,所述抬升机构的抬升顶块上设有接近开关;所述接近开关与控制器电性连接,用于控制螺杆升降机的抬升高度。
47.进一步优选地,所述对中电机键连接有对中电机锥齿轮;圆锥滚子轴承一端固定有轴锥齿轮,另一端固定有齿轮;所述轴锥齿轮与对中电机锥齿轮啮合,齿轮与齿条啮合;在对中电机驱动下,对中电机锥齿轮带动轴锥齿轮逆时针旋转,从而带动圆锥滚子轴承逆时针旋转,齿轮逆时针旋转;齿轮驱动两侧的齿条90做相背离水平运动,对中臂伸出对中车辆;反之,对中电机顺时针旋转,对中臂缩回。
48.进一步优选地,所述对中臂侧壁中心位置设有对中臂行程开关;所述直臂上端面设有直臂行程开关。
49.一种用于立体车库取停车的侧向搬运装置的搬运方法,其特征在于:具体包括以下步骤:s1、子车找到车轮中心:中心升降平台载着车辆移动至与目标车位平台同等高度,中心升降平台上的母车机构和子车机构开始动作;两个子车机构沿纵向方向移动,一个向车辆前轮方向移动,另一个向车辆后轮方向移动;当向前轮方向移动的子车机构上的停车定位光电传感器识到中心升降平台的第二前轮移动蹲认址孔后停止运动,此时子车机构的中心与车辆前轮轮胎的中心重合;另一个子车机构向后轮方向移动,直至行程控制传感器识别轮胎到信号消失,此子车机构停止移动;子车行走电机编码器反馈信号给控制器,从而控制子车行走电机反方向旋转,子车机构往回移动车辆后轮一半的长度,此时子车机构中心与车辆后轮中心重合;s2、子车换为横向行走:子车机构上的子车抬升机构启动,抬升电机驱动螺杆升降机的螺杆上升,上升距离由接近开关控制;抬升顶块被顶起,与抬升顶块连接固定的主巷道主动轮和主巷道从动轮也被顶起离开中心升降平台,子车机构由主巷道主动轮和主巷道从动轮落地支撑变为次巷道主动轮和次巷道从动轮支撑;子车机构的行进方向由纵向变为横向;s3、对中车辆车轮:子车机构上对中机构的对中电机启动,在对中电机驱动下,对中电机锥齿轮带动轴锥齿轮逆时针旋转,从而带动圆锥滚子轴承逆时针旋转,齿轮逆时针旋转;齿轮驱动两侧的齿条90做相背离水平运动,对中臂伸出对中车辆;直至对中臂上布设的对中臂行程开关触到轮胎停止运动,实现车辆车轮左右对中;s4、抬起车辆:子车机构上的螺杆升降机继续上升,抬升顶块顶起对中机构的导轨固定座,从而使对中机构整体同步上升,直臂上端面设置的直臂行程开关触碰到车轮后继续上升,从而抬起车辆;s5、变距机构对准目标平台的移动蹲:中心升降平台上的变距机构启动;变距电机启动运行,通过传动机构驱动变距丝杠绕自身轴线转动,变距丝杠滑动螺母在变距丝杠螺纹段上沿轴线方向滑动,带动固定板移动;两个变距机构分别向车辆前轮和后轮移动,直至向前轮移动的车蹲停位光电传感器识别到第一前轮移动蹲认址孔、向后轮移动的车蹲停位光电传感器识别到第一后轮移动蹲认址孔,此时伸缩机构的推力板分别对准第一前轮移动
蹲认址孔和第一后轮移动蹲认址孔;s6、伸缩机构连接目标平台的移动蹲:中心升降平台上的伸缩机构启动;伸缩电机启动运行,通过传动机构驱动伸缩丝杠绕自身轴线转动,伸缩丝杠滑动螺母在伸缩丝杠螺纹段上沿轴线方向滑动,带动推力板插入第一前轮移动蹲认址孔和第一后轮移动蹲认址孔内;s7、目标平台的移动蹲向两侧分开:变距机构再次启动运行进行变距移动,推力板带动第一前轮移动蹲在移动蹲滑轨向前轮方向移动,直至车蹲停位光电传感器识别到中心升降平台的第二前轮移动蹲认址孔时停止移动;推力板带动第一后轮移动蹲在移动蹲滑轨向后轮方向移动,直至车蹲停位光电传感器识别到中心升降平台的第二后轮移动蹲认址孔时停止移动;此时第一前轮移动蹲和第一后轮移动蹲向纵向两侧移开,为子车机构和母车机构的横向移动让开通道; s8、子车进入目标车位:子车机构的子车行走电机启动运行,带动次巷道主动轮旋转,从而向目标车位移动;子车机构上的停车定位光电传感器识别到目标车位上的第一前轮固定蹲认址片时,子车机构停止移动;s9、目标平台的移动蹲复位:中心升降平台上的变距机构和伸缩机构启动运行进行反方向变距;当子车机构上的停车定位光电传感器照到目标车位平台上的第一前轮移动蹲和第一后轮移动蹲时,变距机构停止变距移动;伸缩机构开始反向缩回至初始位置;s10、子车落位:子车机构上的螺杆升降机下降,对中机构整体同步下降,直至车辆的四个车轮分别落在目标车位的第一前轮固定蹲、第一后轮固定蹲、第一前轮移动蹲、第一后轮移动蹲上;s11、子车恢复纵向行走:对中机构的对中臂缩回;子车机构上的螺杆升降机继续下降,主巷道主动轮和主巷道从动轮落在目标车位平台上;同时,次巷道主动轮和次巷道从动轮抬起脱离目标车位平台,子车机构由次巷道主动轮和次巷道从动轮落地支撑变为主巷道主动轮和主巷道从动轮落地支撑;子车机构的行进方向由横向变为纵向;s12、子车和母车返回中心升降平台:子车机构向母车机构纵向移动,子车机构的停车定位光电传感器识别到母车机构上的子车返回认址片,子车机构停止运动;母车机构的母车行走电机启动运行,载着子车机构往中心升降平台移动,母车机构上的存取车定位光电照到中心升降平台上的母车停位认址片,母车机构停止移动,存车动作完成;母车电源机构的充电头压住中心升降平台上的充电板,开始为母车电源机构自动充电;s13、上述步骤为侧向存车的工作步骤,侧向取车的原理与侧向存车的相同,但动作流程相反。
50.本发明具有如下有益效果:本装置使用变距机构和伸缩机构调整移动车蹲的位置,来适配不同车身长度、宽度车辆车轮的位置;调整的过程通过光电传感器识别移动车蹲的位置,并反馈至控制器,由控制器控制电机编码器驱动变距机构和伸缩机构移动,位置移动自动精准;通过子母车机构组合搬运车辆,子车机构负责移动寻找车辆,并通过对中机构精准找到车轮中心,而后对中机构抬起车辆,并与母车机构配合,将车辆搬运至目标车位;完成搬运后,母车机构和子
车机构能自动返回中心升降平台并充电;整个过程由控制器控制配合光电感应器和电机编码器完成,动作简洁精准,自动化程度高,不会损伤车辆,且能适配各种车辆。
附图说明
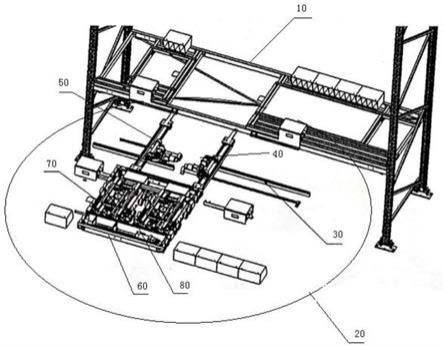
51.图1是本发明一种用于立体车库取停车的侧向搬运装置的结构布置总示意图。
52.图2是本发明一种用于立体车库取停车的侧向搬运装置的目标平台和中心升降平台示意图。
53.图3是本发明一种用于立体车库取停车的侧向搬运装置的车蹲示意图。
54.图4是本发明一种用于立体车库取停车的侧向搬运装置的变距机构示意图。
55.图5是本发明一种用于立体车库取停车的侧向搬运装置的伸缩机构示意图。
56.图6是本发明一种用于立体车库取停车的侧向搬运装置的子车机构和母车机构配合示意图。
57.图7是本发明一种用于立体车库取停车的侧向搬运装置的母车机构结构示意图。
58.图8是本发明一种用于立体车库取停车的侧向搬运装置的子车导向机构示意图。
59.图9是本发明一种用于立体车库取停车的侧向搬运装置的子车机构和对中机构配合示意图。
60.图10是本发明一种用于立体车库取停车的侧向搬运装置的子车机构示意图。
61.图11是本发明一种用于立体车库取停车的侧向搬运装置的对中机构示意图。
62.图12是本发明一种用于立体车库取停车的侧向搬运装置的对中机构运动原理图。
63.其中有:10.目标车位平台;11.第一前轮固定蹲;111.第一前轮固定蹲认址片;12. 第一后轮固定蹲;13. 第一前轮移动蹲;131.第一前轮移动蹲认址片;132.第一前轮移动蹲认址孔;14. 第一后轮移动蹲;141. 第一后轮移动蹲认址片;142. 第一后轮移动蹲认址孔;15.移动蹲滑轨;20.中心升降平台;21.第二前轮固定蹲;22. 第二后轮固定蹲;23. 第二前轮移动蹲;231. 第二前轮移动蹲认址片;232. 第二前轮移动蹲认址孔;24. 第二后轮移动蹲;241. 第二后轮移动蹲认址片;242. 第二后轮移动蹲认址孔25.变距滑动导轨;26. 母车停位认址片;27.充电板;30.变距机构;31.变距电机;311.变距电机编码器;32.变距丝杠;321.变距丝杠光杆段;322. 变距丝杠螺纹段;33.变距丝杠轴承座;34.变距丝杠滑动螺母;35.固定板;40.传动机构;41.链轮;42.链条;50.伸缩机构;51.伸缩电机;511.伸缩电机编码器;52.伸缩丝杠;521.伸缩丝杠光杆段;522.伸缩丝杠螺纹段;53.伸缩丝杠轴承座;54.伸缩丝杠滑动螺母;55.伸缩机构滑动轨道;56.推力板;57.车蹲停位光电传感器;60.母车机构;61.母车底盘;62.母车驱动机构;621.母车主动轮;622.母车从动轮;623.母车行走轴;624.母车行走电机;625. 母车行走电机编码器;63.子车返回认址片;64.母车电源机构;641.充电头;65.子车导向机构;651.子车导向杆;652.导向座;653.导向轴孔;66.存取车定位光电;67.尼龙止挡;70.子车机构;71.子车底盘;72.子车抬升机构;721.螺杆升降机;722.抬升顶块;
723.抬升电机;724.接近开关;73.子车驱动机构;731.主巷道主动轮;732.主巷道从动轮;733.次巷道主动轮;734.次巷道从动轮;735.主巷道行走轴;736.次巷道行走轴;737.子车行走电机;738.子车行走电机编码器;74.停车定位光电传感器;80.对中机构;81.对中导轨;82.直臂;821.直臂行程开关;83.导轨固定座;84.连接板;85.对中电机;851.对中电机编码器;852.对中电机锥齿轮;86.圆锥滚子轴承;861.轴锥齿轮;862.齿轮;87.齿条;88.对中臂;881.对中臂行程开关;89.行程控制传感器;90.控制器。
具体实施方式
64.下面结合附图和具体较佳实施方式对本发明作进一步详细的说明。
65.本发明的描述中,需要理解的是,术语“左侧”、“右侧”、“上部”、“下部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,“第一”、“第二”等并不表示零部件的重要程度,因此不能理解为对本发明的限制。本实施例中采用的具体尺寸只是为了举例说明技术方案,并不限制本发明的保护范围。
66.下面结合附图和和具体较佳实施方式对本发明作进一步详细的说明。
67.如图1所示,一种用于立体车库取停车的侧向搬运装置,包括目标车位平台10、中心升降平台20、变距机构30、传动机构40、伸缩机构50、母车机构60、子车机构70、对中机构80。
68.定义车身长度方向为纵向,车身宽度方向为横向,即前轮和后轮连线方向为纵向,前轮之间连线方向以及后轮之间连线方向为横向。
69.如图2所示,目标车位平台10上布设有第一前轮固定蹲11、第一后轮固定蹲12、第一前轮移动蹲13、第一后轮移动蹲14和移动蹲滑轨15。
70.蹲即为方形的小平台,供车辆的四个车轮落在其上。本装置以前轮为定位参照点,第一前轮固定蹲11、第一前轮移动蹲13和第一后轮移动蹲14为正方体,尺寸略大于车轮宽度;第一后轮固定蹲12为若干个正方体沿纵向排列组成的长方体,用于适应不同车身长度的车辆停放。
71.移动蹲滑轨15纵向嵌设在目标车位平台10内,移动蹲滑轨15的上端面与目标车位平台10平齐;第一前轮移动蹲13和第一后轮移动蹲14布设在移动蹲滑轨15上,第一前轮固定蹲11和第一后轮固定蹲12与移动蹲滑轨15平行布设。
72.第一前轮固定蹲11侧壁中心设有第一前轮固定蹲认址片111。
73.如图3所示,第一前轮移动蹲13布设有第一前轮移动蹲认址片131,第一前轮移动蹲13的侧壁中心开有第一前轮移动蹲认址孔132;第一后轮移动蹲14布设有第一后轮移动蹲认址片141;第一后轮移动蹲14的侧壁中心开有第一后轮移动蹲认址孔142。认址片的作用是与光电传感器配合定位;认址孔的作用主要有两个,其一是配合认址片,形成信号“0”和“1”的识别关系,光电传感器识别到认址片则给出移动信号,识别到认址孔则给出停止信号;其二是让变距和伸缩机构通过插入认址孔内来调节移动蹲的位置。
74.中心升降平台20布设有第二前轮固定蹲21、第二后轮固定蹲22、第二前轮移动蹲23、第二后轮移动蹲24和变距滑动导轨25。
75.变距滑动导轨25嵌设在中心升降平台20内,上端面与中心升降平台20平齐;第二前轮移动蹲23和第二后轮移动蹲24布设在变距滑动导轨25上。
76.中心升降平台20中心位置还设有母车停位认址片26,母车停位认址片26的作用是与存取车定位光电66配合定位,让母车机构在中心升降平台20找到复位位置。
77.第二前轮移动蹲23侧壁布设有第二前轮移动蹲认址片231;第二前轮移动蹲23侧壁中心开有第二前轮移动蹲认址孔232;第二后轮移动蹲24侧壁布设有第二后轮移动蹲认址片241;第二后轮移动蹲24侧壁中心开有第二后轮移动蹲认址孔242。
78.中心升降平台20上布设的蹲和目标平台10上的蹲的布设方式类似,认址片和认址孔的作用也相同。
79.中心升降平台20上还设置有充电板27,与外接电源连接,用于给母车电源机构64供电。
80.如图4所示,变距机构30对称布设在中心升降平台20上;变距机构30包括变距电机31、变距丝杠32、变距丝杠轴承座33、变距丝杠滑动螺母34、固定板35。
81.变距电机31和变距丝杠轴承座33固定在中心升降平台20上;变距丝杠32穿设在变距丝杠轴承座33内,并通过传动机构40与变距电机31相连。变距电机31配套有变距电机编码器311,与控制器90电性连接。
82.变距丝杠32一端为变距丝杠光杆段321,不设置螺纹;另一端为变距丝杠螺纹段322,设置螺纹;变距丝杠螺纹段322上套设有两个变距丝杠滑动螺母34;变距丝杠滑动螺母34的顶端布设有固定板35。
83.变距丝杠螺纹段322与变距丝杠光杆段321连接的一端套设有变距丝杠轴承座33,变距丝杠螺纹段322另一端也套设有变距丝杠轴承座33。
84.传动机构40包括链轮41、链条42。本装置采用的主要传动方式是链轮链条连接传动,也可采用如齿轮啮合的方式传动。变距机构30和伸缩机构50采用通配的传动机构40,即它们的传动机构尺寸大小、布置形式相同,便于零件的更换和通配适用。
85.链轮41分别套设在变距丝杠光杆段321和变距电机31输出轴上,链轮41之间通过链条42连接;在变距电机31通过传动机构40的驱动下,变距丝杠32绕自身轴线转动,变距丝杠滑动螺母34在变距丝杠螺纹段322上沿轴线方向滑动,带动固定板35移动。
86.变距机构30的主要作用是根据控制器90的指令信号,在纵向方向调整移动蹲之间的间距,在车辆向目标平台移动时,将移动蹲向两侧分开,为车辆存取让出位置。
87.如图5所示,伸缩机构50与变距机构30配套设置;2套伸缩机构50和变距机构30完全呈镜像设置和移动。每个伸缩机构50包括伸缩电机51、伸缩丝杠52、伸缩丝杠轴承座53、伸缩丝杠滑动螺母54、伸缩机构滑动轨道55、推力板56和车蹲停位光电传感器57。
88.伸缩电机51和伸缩丝杠轴承座53布设在固定板53上,伸缩电机51配套有伸缩电机编码器511,与控制器90电性连接。
89.伸缩丝杠52中间段为伸缩丝杠光杆段521,不设置螺纹;两端为伸缩丝杠螺纹段522,两个伸缩丝杠螺纹段522上的螺纹旋向相反;伸缩丝杠光杆段521穿设在伸缩丝杠轴承座53内,与伸缩丝杠轴承座53滑动配合连接;伸缩丝杠光杆段521设置有链轮41,两个伸缩丝杠螺纹段522上分别套设有伸缩丝杠滑动螺母54。
90.伸缩电机51输出轴上也设置有链轮41,伸缩电机51的链轮41与变伸缩丝杠52的链
轮41之间通过链条52连接。
91.伸缩机构滑动轨道55布设在固定板53上;伸缩机构滑动轨道55上布设有推力板56;推力板56与伸缩丝杠滑动螺母54固定连接,并可在伸缩丝杠滑动螺母54带动下,在伸缩机构滑动轨道55自由滑动。
92.车蹲停位光电传感器57固定在推力板56端部。车蹲停位光电传感器57用于识别车轮的移动蹲的位置,通过控制器90反馈,使推力板56停留在合适位置。
93.伸缩机构50的主要作用是控制移动蹲在横向方向移动调节位置,来使推力板56控制移动蹲的位置,与变距机构30一起,将移动蹲向两侧分开,为车辆存取让出位置。
94.如图6和图7所示,母车机构60包括母车底盘61、母车驱动机构62、子车返回认址片63、母车电源机构64、子车导向机构65。
95.母车驱动机构62布设在母车底盘61上;母车驱动机构62包括两对母车主动轮621、两对母车从动轮622、母车行走轴623、母车行走电机624。
96.母车主动轮621、母车从动轮622分别布设在母车底盘61的四个角上;两对母车主动轮621通过母车行走轴623相连;母车行走轴623纵向布设在母车底盘61上,并通过传动机构40与母车行走电机624相连;母车电源机构64布设在母车底盘61上,与母车行走电机624电性连接;母车电源机构64设有充电头641;充电头641与充电板27匹配设置。
97.子车导向机构65布设在母车底盘61横向的两个侧边上,共布设有四个子车导向机构65;母车行走电机624配套有母车行走电机编码器625,与控制器90电性连接。
98.如图8所示,子车导向机构65包括子车导向杆651和导向座652;导向座652底部设有铰链,导向座652固定在母车底盘61上,与母车底盘61转动连接;子车导向杆651穿过导向座652上设置的导向轴孔653,连接至子车机构70。子车导向机构65将母车机构60和子车机构70连接起来,且子车导向机构65带有转动功能,在子车机构70换向行走后,仍能与母车机构60连接。
99.母车机构60还设置有存取车定位光电66;存取车定位光电66固定在母车底盘61的中心位置,且朝向中心升降平台20照射,与母车停位认址片26对应布设,确认母车机构60在中心升降平台20上的复位位置;存取车定位光电66与控制器90电性连接。
100.母车机构60的母车底盘61纵向的两侧边中点位置设有尼龙止挡67,用作子车机构70回到母车机构60时的物理限位阻挡。
101.如图9和图10所示,子车机构70对称布设在母车机构60上;每个子车机构70包括子车底盘71、子车抬升机构72、子车驱动机构73、停车定位光电传感器74。
102.子车底盘71与子车导向杆651相连接固定。
103.子车抬升机构72布设在子车底盘71的四个角上;子车抬升机构72包括螺杆升降机721、抬升顶块722和抬升电机723;螺杆升降机721底部固定在子车底盘71上,与抬升电机723相连,螺杆升降机721顶部设置有抬升顶块722。
104.子车驱动机构73包括两对主巷道主动轮731、两对主巷道从动轮732、两对次巷道主动轮733、两对次巷道从动轮734、主巷道行走轴735、次巷道行走轴736和子车行走电机737。
105.主巷道主动轮731和主巷道从动轮732与抬升顶块722固定相连;两对主巷道主动轮731之间通过主巷道行走轴735相连接;次巷道主动轮733和次巷道从动轮734布设在子车
底盘71横向的两侧边上;两对次巷道主动轮733之间通过次巷道行走轴736相连接;主巷道行走轴735和次巷道行走轴736分别通过传动机构40与子车行走电机737相连。子车行走电机737配套有子车行走电机编码器728,与控制器90电性连接。
106.子车机构70还包括停车定位光电传感器74;停车定位光电传感器74布设在子车底盘71的两个纵向侧边的中心位置,与子车返回认址片63的位置对应;停车定位光电传感器74和子车返回认址片63与控制器90电性连接。
107.子车抬升机构72的抬升顶块722上设有接近开关724;接近开关与控制器90电性连接,用于控制螺杆升降机721的抬升高度。
108.如图11和图12所示,对中机构80与子车机构70配套布设;对中机构80包括对中导轨81、直臂82、导轨固定座83、连接板84、对中电机85、圆锥滚子轴承86、齿条87、对中臂88、行程控制传感器89。
109.对中导轨81横向对称布设;对中导轨81内滑动配合布设有直臂82,导轨固定座83与对中导轨81的下端面固定连接;导轨固定座83固定在抬升顶块722顶部;两根对中导轨81间设有连接板84,连接板上固定有对中电机85;;对中电机85配套有对中电机编码器851,与控制器90电性连接;对中电机85通过圆锥滚子轴承86将对中电机85的圆周运动转化为齿条87的直线运动。
110.对中电机85键连接有对中电机锥齿轮852;圆锥滚子轴承86一端固定有轴锥齿轮861,另一端固定有齿轮862;轴锥齿轮861与对中电机锥齿轮852啮合,齿轮862与齿条87啮合;在对中电机85驱动下,对中电机锥齿轮852带动轴锥齿轮861逆时针旋转,从而带动圆锥滚子轴承86逆时针旋转,齿轮862逆时针旋转;齿轮862驱动两侧的齿条87做相背离水平运动,对中臂88伸出对中车辆;反之,对中电机85顺时针旋转,对中臂88缩回齿条87与直臂82平行布设,齿条87与直臂82通过对中臂88连接固定;对中臂88侧壁中心位置设有对中臂行程开关881;直臂82端部布设有行程控制传感器89,直臂82上端面设有直臂行程开关821。
111.一种用于立体车库取停车的侧向搬运装置的搬运方法,具体包括以下步骤:s1、子车找到车轮中心:中心升降平台20载着车辆移动至与目标车位平台10同等高度,中心升降平台20上的母车机构60和子车机构70开始动作;两个子车机构70沿纵向方向移动,一个向车辆前轮方向移动,另一个向车辆后轮方向移动;当向前轮方向移动的子车机构70上的停车定位光电传感器74识到到中心升降平台20的第二前轮移动蹲认址孔232后停止运动,此时子车机构70的中心与车辆前轮轮胎的中心重合;另一个子车机构70向后轮方向移动,直至停车定位光电传感器74识别轮胎到信号消失,此子车机构70停止移动;子车行走电机编码器728反馈信号给控制器90,从而控制子车行走电机737反方向旋转,子车机构70往回移动车辆后轮一半的长度,此时子车机构70中心与车辆后轮中心重合;s2、子车换为横向行走:子车机构70上的子车抬升机构72启动,抬升电机723驱动螺杆升降机721的螺杆上升,上升距离由接近开关724控制;抬升顶块722被顶起,与抬升顶块722连接固定的主巷道主动轮731和主巷道从动轮732也被顶起离开中心升降平台20,子车机构70由主巷道主动轮731和主巷道从动轮732落地支撑变为次巷道主动轮733和次巷道从动轮734支撑;子车机构70的行进方向由纵向变为横向;s3、对中车辆车轮:子车机构70上对中机构80的对中电机85启动,在对中电机85驱
动下,对中电机锥齿轮852带动轴锥齿轮861逆时针旋转,从而带动圆锥滚子轴承86逆时针旋转,齿轮862逆时针旋转;齿轮862驱动两侧的齿条90做相背离水平运动,对中臂88伸出对中车辆;直至对中臂88上布设有行程控制传感器89触到轮胎停止运动,实现车辆车轮左右对中;s4、抬起车辆:子车机构70上的螺杆升降机721继续上升,抬升顶块722顶起对中机构80的导轨固定座83,从而使对中机构80整体同步上升,抬起车辆;s5、变距机构对准目标平台的移动蹲:中心升降平台20上的变距机构30启动;变距电机31启动运行,通过传动机构40驱动变距丝杠32绕自身轴线转动,变距丝杠滑动螺母34在变距丝杠螺纹段322上沿轴线方向滑动,带动固定板35移动;两个变距机构分别向车辆前轮和后轮移动,直至向前轮移动的车蹲停位光电传感器57识别到第一前轮移动蹲认址孔132、向后轮移动的车蹲停位光电传感器57识别到第一后轮移动蹲认址孔142,此时伸缩机构50的推力板56分别对准第一前轮移动蹲认址孔132和第一后轮移动蹲认址孔142;s6、伸缩机构连接目标平台的移动蹲:中心升降平台20上的伸缩机构50启动;伸缩电机51启动运行,通过传动机构40驱动伸缩丝杠52绕自身轴线转动,伸缩丝杠滑动螺母54在伸缩丝杠螺纹段522上沿轴线方向滑动,带动推力板56插入第一前轮移动蹲认址孔132和第一后轮移动蹲认址孔142内;s7、目标平台的移动蹲向两侧分开:变距机构30再次启动运行进行变距移动,推力板56带动第一前轮移动蹲13在移动蹲滑轨15向前轮方向移动,直至车蹲停位光电传感器57识别到中心升降平台20的第二前轮移动蹲认址孔232时停止移动;推力板56带动第一后轮移动蹲14在移动蹲滑轨15向后轮方向移动,直至车蹲停位光电传感器57识别到中心升降平台20的第二后轮移动蹲认址孔242时停止移动;此时第一前轮移动蹲13和第一后轮移动蹲14向纵向两侧移开,为子车机构70和母车机构60的横向移动让开通道; s8、子车进入目标车位:子车机构70的子车行走电机737启动运行,带动次巷道主动轮733旋转,从而向目标车位10移动;子车机构70上的停车定位光电传感器74识别到目标车位10上的第一前轮固定蹲认址片111时,子车机构70停止移动;s9、目标平台的移动蹲复位:中心升降平台20上的变距机构30和伸缩机构50启动运行进行反方向变距;当子车机构70上的停车定位光电传感器74照到目标车位平台10上的第一前轮移动蹲13和第一后轮移动蹲14时,变距机构30停止变距移动;伸缩机构50开始反向缩回至初始位置;s10、子车落位:子车机构70上的螺杆升降机721下降,对中机构80整体同步下降,直至车辆的四个车轮分别落在目标车位10的第一前轮固定蹲11、第一后轮固定蹲12、第一前轮移动蹲13、第一后轮移动蹲14上;s11、子车恢复纵向行走:对中机构80的对中臂88缩回;子车机构70上的螺杆升降机721继续下降,主巷道主动轮731和主巷道从动轮732落在目标车位平台10上;同时,次巷道主动轮733和次巷道从动轮734抬起脱离目标车位平台10上,子车机构70由次巷道主动轮733和次巷道从动轮734落地支撑变为主巷道主动轮731和主巷道从动轮732落地支撑;子车机构70的行进方向由横向变为纵向;s12、子车和母车返回中心升降平台:子车机构70向母车机构60纵向移动,子车机构70的停车定位光电传感器74识别到母车机构60上的子车返回认址片63,子车机构70停止
运动;母车机构60的母车行走电机624启动运行,载着子车机构70往中心升降平台20移动,母车机构60上的存取车定位光电66照到中心升降平台20上的母车停位认址片26,母车机构60停止移动,存车动作完成;母车电源机构64的充电头641压住中心升降平台上的充电板27,开始为母车电源机构64自动充电;s13、上述步骤为侧向存车的工作步骤,侧向取车的原理与侧向存车的相同,但动作流程相反。
112.本装置使用变距机构和伸缩机构调整移动车蹲的位置,来适配不同车身长度、宽度车辆车轮的位置;调整的过程通过光电传感器识别移动车蹲的位置,并反馈至控制器,由控制器控制电机编码器驱动变距机构和伸缩机构移动,位置移动自动精准;通过子母车机构组合搬运车辆,子车机构负责移动寻找车辆的车辆,并通过对中机构精准找到车轮中心,而后对中机构抬起车辆,并与母车机构配合,将车辆搬运至目标车位;完成搬运后,母车机构和子车机构能自动返回中心升降平台并充电;整个过程由控制器控制配合光电感应器和电机编码器完成,动作简洁精准,自动化程度高,不会损伤车辆,且能适配各种车辆。
113.以上详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种等同变换,这些等同变换均属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1