涂敷机器人的制作方法
1.本发明涉及建筑装修施工技术领域,特别涉及一种涂敷机器人。
背景技术:
2.腻子是平整墙体表面的一种装饰性质材料,是一种厚浆状涂料,是涂料粉刷前必不可少的一种产品。
3.建筑装修施工领域中,腻子涂敷是一道常见的重要工序,目前,主要通过人工刮抹涂敷上墙的方式来完成腻子涂敷工序,而因为工地的工作环境恶劣,人工的施工作业劳动强度大,效率低,施工工人的技术、经验和熟练程度参差不齐等原因,导致腻子涂敷工序的施工质量及一致性难以保证,且建筑工人“老龄化”严重,年轻人很少愿意从事建筑行业,导致腻子涂敷工序面临着劳动力缺失和施工成本高等问题。针对以上存在的问题,现在亟需本领域技术人员对此做出改进。
技术实现要素:
4.本发明的主要目的是提出一种涂敷机器人,旨在解决目前腻子涂敷工序的自动化水平较低的技术问题,于此同时,考虑到腻子属于含有较多颗粒物的厚浆性涂料,其容易粘附在涂料喷枪的出料处的密封面上,对涂料喷枪的密封面造成磨损,进而导致涂料喷枪的出料口出现漏液的问题,基于此,本技术的涂料喷枪采用线性接触密封的方式(即涂料喷枪采用第一密封部的球状弧面与第一导向槽的环状弧面密封配合的方式),以缩小涂料喷枪的密封面,进而使涂料喷枪的密封面不易受到腻子粘附的干扰,且,第一密封部在第一导向槽的槽深方向上抽拉移动,如此,在第一密封部开始移动的瞬间,第一密封部的整个外周壁能够及时地与第一导向槽的槽壁脱离,这有利于快速打开出料口,进而使腻子浆料及时地从出料口喷出,解决了腻子喷涂有延时的问题;此外,本技术还对涂料喷枪的第一密封部和第一导向槽的槽壁两者的材料进行了改进(即采用金属材料制成第一密封部和第一导向槽的槽壁),如此,有利于解决涂料喷枪的密封面受到腻子的影响而损耗快的技术问题。
5.本技术方案还考虑到在涂敷机器人停止或暂停腻子涂敷工序时,因泵送组件会对泵送管路内的腻子浆料持续加压,导致泵送管路的腻子出现泌水现象,进而导致腻子在泵送管路内结团、结块,为了解决上述问题,本技术方案还采用了泄压机构对泵送管路进行泄压,以避免出现腻子结团、结块的问题,而本技术的泄压机构又采用了喷枪式的结构喷送腻子,进一步地,考虑到腻子属于含有较多颗粒物的厚浆性涂料,其容易粘附在喷枪的出口处的密封面上,对密封面造成磨损,进而导致喷枪的出口出现漏液的问题,基于此,泄压机构的泄压喷枪采用线性接触密封的方式(即第二密封部的球状弧面与第二导向槽的环状弧面密封配合),以缩小泄压喷枪的密封面,进而使泄压喷枪的密封面不易受到腻子粘附的干扰;且,第二密封部在第二导向槽的槽深方向上抽拉移动,如此,在第二密封部开始移动的瞬间,第二密封部的整个外周壁能够及时地与第二导向槽的槽壁脱离,这有利于快速打开泄压喷枪的泄压出口,进而使腻子浆料及时地从泄压出口喷出,避免了泄压过程中出现延
时现象;此外,本技术的泄压喷枪还对第二密封部和第二导向槽的槽壁两者的材料进行了改进(即采用金属材料制成第二密封部和第二导向槽的槽壁),如此,有利于解决泄压喷枪的密封面受到腻子的影响而损耗快的技术问题。
6.为实现上述目的,本发明提出的涂敷机器人,包括机体、料桶机构、涂料机构和泄压机构;其中,
7.所述机体设有可活动的机械臂;
8.所述料桶机构设于所述机体,所述料桶机构设有涂料容放腔和涂料泵送管路,所述涂料容放腔与所述涂料泵送管路的进料端连通;
9.所述涂料机构包括泵送组件和涂料喷枪,所述涂料喷枪安装于所述机械臂,所述涂料喷枪与所述涂料泵送管路的出料端相连,所述泵送组件设于所述涂料泵送管路,以为涂料从所述涂料容放腔到所述涂料喷枪的流动提供动力,所述涂料喷枪具有供所述涂料流出的打开状态,和具有防止所述涂料流出的关闭状态;以及
10.所述泄压机构包括泄压组件和泄压管路,所述泄压管路的进料端与所述泵送组件的出料端连通,所述泄压组件设于所述泄压管路,所述泄压组件被配置为在所述涂料喷枪处于所述关闭状态时,打开所述泄压管路。
11.可选地,所述涂料喷枪包括喷枪本体、第一枪针件和第一驱动组件,所述喷枪本体内设有腔体,所述喷枪本体上设有与所述腔体连通的进料口和出料口,所述进料口与所述涂料泵送管路的出料端连通;
12.所述第一枪针件可活动地安装于所述腔体,所述第一枪针件与所述腔体的腔壁配合形成有过料间隙,在所述打开状态,所述第一枪针件移动以打开所述出料口,在所述关闭状态,所述第一枪针件移动以关闭所述出料口;
13.所述第一驱动组件与所述第一枪针件传动连接,以带动所述第一枪针件移动打开或关闭所述出料口。
14.可选地,所述第一枪针件包括第一推杆部和第一密封部,所述第一密封部设于所述第一推杆部,所述第一推杆部可抽拉地安装于所述腔体,所述第一推杆部与所述第一驱动组件传动连接,所述第一推杆部抽拉移动以带动所述第一密封部移动打开或关闭所述出料口。
15.可选地,所述腔体与所述出料口之间设有第一导向槽,所述腔体通过所述第一导向槽与所述出料口连通,所述第一导向槽从所述腔体到所述出料口方向呈渐缩设置,所述第一密封部被配置为与所述第一导向槽的部分槽壁密封配合,以关闭所述出料口。
16.可选地,所述第一密封部呈球状或类球状设置,所述第一导向槽的槽壁上具有与所述密封部的曲形表面密封配合的弧形面。
17.可选地,所述第一导向槽呈圆台状设置。
18.可选地,所述第一密封部与所述第一导向槽的槽壁密封配合的部分为金属材料,所述第一导向槽的槽壁上与所述第一密封部密封配合的部分为金属材料。
19.可选地,所述第一推杆部和所述第一密封部一体成型。
20.可选地,所述第一推杆部设有第一嵌入槽,所述第一密封部嵌设于所述第一嵌入槽。
21.可选地,所述第一驱动组件包括第一自动驱动件和第一传动件,所述第一自动驱
动件通过所述第一传动件与所述第一推杆部相连。
22.可选地,所述腔体包括过料通道和传动通道,所述过料通道的一端与所述出料口连通,所述过料通道的另一端通过抽拉过孔与所述传动通道连通,所述进料口与所述过料通道连通,所述第一推杆部的一端通过所述抽拉过孔,从所述过料通道伸入所述传动通道,所述第一密封部与所述第一推杆部上位于所述过料通道内的部分相连,所述第一推杆部上位于所述过料通道内的部分与所述过料通道的内壁配合形成所述过料间隙;
23.所述第一传动件部分伸入所述传动通道,并与位于所述传动通道内的所述第一推杆部相连。
24.可选地,所述第一传动件包括第一拉轴,所述第一拉轴从所述传动通道远离所述过料通道的一侧伸入所述传动通道内,所述第一拉轴与所述第一推杆部相连,所述第一拉轴的外周壁凸设有第一安装座,所述第一拉轴的外周壁、所述第一安装座和所述传动通道的内壁共同配合形成有第一弹性件安装腔;
25.所述第一驱动组件包括设于所述第一弹性件安装腔的第一弹性复位件,所述第一弹性复位件沿自身的弹性伸缩方向的一端与所述第一安装座连接,另一端与所述传动通道的内壁连接,所述第一弹性复位件被配置为向所述第一推杆部施加一弹性力,以驱动所述第一推杆部移动关闭所述出料口。
26.可选地,所述第一驱动组件包括第一手动驱动件,所述第一手动驱动件可活动地安装于所述喷枪本体,所述第一手动驱动件与所述第一拉轴传动连接,所述第一手动驱动件被配置为移动以带动所述第一推杆部移动打开所述出料口。
27.可选地,所述喷枪本体的外侧设有进料管,所述进料管的一端与所述进料口连通,所述涂敷机器人包括第一转接头和第二转接头,所述进料管的另一端与所述第一转接头的一端可拆配合,所述第一转接头的另一端与所述第二转接头的一端可拆配合,所述第二转接头的另一端与所述涂料泵送管路的出料端可拆配合,所述第一转接头和所述第二转接头共同配合形成有连通所述涂料泵送管路的出料端和所述进料管的进料通道。
28.可选地,所述第一转接头设有第一螺纹,所述第二转接头设有第二螺纹,所述第一螺纹与所述第二螺纹相适配。
29.可选地,所述泄压组件包括泄压喷枪、第二枪针件和第二驱动组件,所述泄压喷枪内设有泄压腔,所述泄压喷枪上设有与所述泄压腔连通的泄压进口和泄压出口,所述泄压进口与所述泄压管路的出料端连通;
30.所述第二枪针件可活动地设于所述泄压腔,所述第二针枪件与所述泄压腔的腔壁配合形成有过压间隙,在所述关闭状态,所述第二枪针件移动以打开所述泄压出口;
31.所述第二驱动组件与所述第二枪针件传动连接,以带动所述第二枪针件移动打开或关闭所述泄压出口。
32.可选地,所述第二枪针件包括第二推杆部和第二密封部,所述第二密封部设于所述第二推杆部,所述第二推杆部可抽拉地安装于所述泄压腔,所述第二推杆部与所述第二驱动组件传动连接,所述第二推杆部抽拉移动以带动所述第二密封部打开或关闭所述泄压出口。
33.可选地,所述泄压腔和所述泄压出口之间设有第二导向槽,所述泄压腔通过所述第二导向槽与所述泄压出口连通,所述第二导向槽从所述泄压腔到所述泄压出口方向呈渐
缩设置,所述第二密封部被配置为与所述第二导向槽的部分槽壁密封配合,以关闭所述泄压出口。
34.可选地,所述第二密封部呈球状或类球状设置,所述第二导向槽的槽壁上具有与所述第二密封部的曲形表面密封配合的弧形面。
35.可选地,所述第二导向槽呈圆台状设置。
36.可选地,所述第二密封部与所述第二导向槽的槽壁密封配合的部分为金属材料,所述第二导向槽的槽壁上与所述第二密封部密封配合的部分为金属材料。
37.可选地,所述第二推杆部和所述第二密封部一体成型。
38.可选地,所述第二推杆部设有第二嵌入槽,所述第二密封部嵌设于所述第二嵌入槽。
39.可选地,所述第二驱动组件包括第二自动驱动件和第二传动件,所述第二自动驱动件通过所述第二传动件与所述第二推杆部传动连接。
40.可选地,所述泄压腔包括过压通道和连接通道,所述过压通道的一端与所述泄压出口连通,所述过压通道的另一端通过滑动过孔与所述连接通道连通,所述泄压进口与所述过压通道连通,所述第二推杆部的一端通过所述滑动过孔,从所述过压通道伸入所述连接通道,所述第二密封部与所述第二推杆部上位于所述过压通道内的部分相连,所述第二推杆部上位于所述过压通道内的部分与所述过压通道的内壁配合形成所述过压间隙;
41.所述第二传动件部分伸入所述连接通道,并与位于所述连接通道内的所述第二推杆部相连。
42.可选地,所述第二传动件包括第二拉轴,所述第二拉轴设于所述连接通道内,所述第二拉轴与所述第二推杆部相连,所述第二拉轴的外周壁凸设有第二安装座,所述第二拉轴的外周壁、所述第二安装座和所述连接通道的内壁共同配合形成有第二弹性件安装腔;
43.所述驱动组件包括设于所述第二弹性件安装腔的第二弹性复位件,所述第二弹性复位件沿自身的弹性伸缩方向的一端与所述第二安装座连接,另一端与所述连接通道的内壁连接,所述第二弹性复位件被配置为向所述第二推杆部施加一弹性力,以驱动所述第二推杆部移动关闭所述泄压出口。
44.可选地,所述第二传动件包括第二喷枪扳机,所述第二喷枪扳机可活动地安装于所述泄压喷枪,所述第二拉轴和所述自动驱动件均与所述第二喷枪扳机传动连接,所述第二喷枪扳机被配置为带动所述第二推杆部移动,以打开所述泄压出口。
45.可选地,所述涂料容放腔的腔壁上设有涂料回收口,所述涂料回收口与所述泄压出口连通。
46.可选地,所述涂敷机器人包括压力检测器和第一控制器,所述压力检测器和所述泄压机构均与所述第一控制器电连接,所述压力检测器被配置为检测所述涂料泵送管路内或泄压管路内的压力,并在检测到的所述压力大于或等于预设压力时,向所述第一控制器发送打开信号,所述第一控制器被配置为在接收到所述打开信号时控制所述泄压机构打开所述泄压管路。
47.可选地,所述泄压机构被配置为当所述涂料喷枪处于所述打开状态时,关闭所述泄压管路。
48.可选地,所述料桶机构包括桶本体和搅拌组件,所述涂料容放腔形成于所述桶本
体,所述搅拌组件包括搅拌件,所述搅拌件可活动地设于所述涂料容放腔,以搅拌存放于所述涂料容放腔内的涂料。
49.可选地,所述搅拌组件包括搅拌电机,所述搅拌电机设于所述桶本体,所述搅拌电机的输出轴与所述搅拌件相连,以驱动所述搅拌件在所述涂料容放腔内转动。
50.可选地,所述搅拌件包括转动杆、连接杆和桶壁刮片,所述转动杆沿所述桶本体的高度方向延伸,所述转动杆与所述搅拌电机的输出轴连接,所述连接杆的一端与所述转动杆相连,所述连接杆的另一端沿靠近所述桶本体的周壁方向延伸,所述桶壁刮片的一端与所述连接杆的另一端连接,所述桶壁刮片的另一端沿所述桶本体的高度方向延伸,所述桶壁刮片背向所述转动杆的一侧被配置为与所述桶本体的周壁抵接,以在所述转动杆转动时,刮涂所述桶本体的周壁。
51.可选地,所述搅拌件包括角度调节结构,所述连接杆通过所述角度调节结构与所述桶壁刮片相连,所述角度调节结构被配置使所述桶壁刮片与所述连接杆之间的连接角度可调节。
52.可选地,所述搅拌件包括转动杆和至少两个搅拌叶,所述转动杆的一端与所述搅拌电机的输出轴连接,所述至少两个搅拌叶分别在所述转动杆的长度方向上间隔设置。
53.可选地,所述涂敷机器人包括余料检测器、报警机构和第二控制器,所述余料检测器和所述报警机构均与所述第二控制器电连接;
54.所述余料检测器被配置为检测所述涂料容放腔内的涂料存放量,并在所述涂料存放量低于预设存放量时,向所述第二控制器发送报警信号,所述第二控制器在接收到所述报警信号时,控制所述报警机构启动以报警。
55.可选地,所述余料检测器包括激光传感器,所述涂料容放腔的腔顶壁上设有余料检测口,所述激光传感器设于所述涂料容放腔的外侧,所述激光传感器的检测端朝向所述余料检测口设置。
56.可选地,所述激光传感器与所述余料检测口在所述料桶机构的高度方向上间隔设置,所述激光传感器与所述余料检测口之间设有防污管,所述防污管形成有连通所述激光传感器的检测端和所述涂料容放腔的检测管道。
57.可选地,所述防污管包括第一管段和第二管段,所述第二管段的周壁开设有涂料清洗口,所述第一管段可开合地设于所述涂料清洗口,在所述第二管段盖合于所述涂料清洗口时,所述第一管段和所述第二管段共同配合形成有所述检测管道。
58.可选地,所述涂料泵送管路上设有截止阀,所述截止阀被配置为打开或关闭所述涂料泵送管路。
59.可选地,所述涂料泵送管路内设有涂料过滤件,所述涂料过滤件被配置为过滤涂料中的颗状物。
60.可选地,所述涂敷机器人包括agv小车,所述料桶机构安装于所述agv小车。
61.可选地,所述agv小车包括agv底盘,所述agv底盘具有上下相对设置的承载面和底面,所述机体安装于所述承载面;
62.所述底面设有三个车轮安装位,所述三个车轮安装位在所述底面上呈三角形布置。
63.可选地,所述agv小车包括前侧车轮组和浮动结构,所述底面的前侧区域设有一个
所述车轮安装位,所述前侧车轮组通过所述浮动结构安装于位于所述前侧区域的所述车轮安装位,所述浮动结构被配置为使所述前侧车轮组在所述agv底盘的高度方向上可移动。
64.可选地,所述agv小车包括后侧驱动轮和后侧从动轮,所述底面的后侧区域设有两个所述车轮安装位,所述后侧驱动轮和后侧从动轮与位于所述后侧区域上的所述两个车轮安装位一一对应;
65.所述前侧车轮组包括前侧驱动轮和前侧从动轮,所述前侧驱动轮和所述后侧驱动轮斜对角设置,所述前侧从动轮和所述后侧从动轮斜对角设置。
66.可选地,所述agv底盘的周缘凸设有防撞件。
67.本发明技术方案的涂敷机器人,通过设置与涂料容放腔连通的涂料泵送管路、及在涂料泵送管路的出料端设置涂料喷枪,在涂料泵送管路中泵送组件的施压下,涂料喷枪可向待涂敷工位(例如但不限于墙壁等)喷涂涂料,如此,免去了施工工人需要在墙体上刮抹涂料的不便,有效地降低了工人们的施工作业劳动强度和提高了涂料涂敷工序的自动化水平;此外,本技术的涂敷机器人还通过设置与泵送组件的出料端连通的泄压管路和可控制泄压管路的打开或关闭的泄压机构,这样,在涂料喷枪关闭时,便可基于打开泄压管路而使涂料能够从涂料泵送管路中流出,有效地防止腻子发生泌水凝固现象,提高产品的使用可靠性和使用安全性。
附图说明
68.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
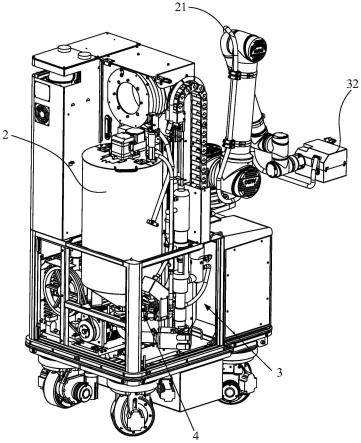
69.图1为本发明涂敷机器人一实施例的结构示意图;
70.图2为图1中涂敷机器人的另一视角的结构示意图;
71.图3为图1中涂敷机器人省略部分结构后的结构示意图;
72.图4为图3中涂敷机器人省略部分结构后的结构示意图;
73.图5为图4中涂敷机器人省略部分结构后的结构示意图;
74.图6为图5另一视角的结构示意图;
75.图7为图1中涂敷机器人的料桶机构的结构示意图;
76.图8为图7中a处的局部放大图;
77.图9为图7中搅拌件的结构示意图;
78.图10为图9的分解示意图;
79.图11为图7中省略部分结构后的俯视图;
80.图12为图1中涂敷机器人的涂料喷枪省略部分结构后的结构示意图;
81.图13为图12另一视角的结构示意图;
82.图14为图12的喷枪本体的结构示意图;
83.图15为图14沿a-a方向的剖视图;
84.图16为喷枪本体一实施例的内部结构的局部示意图;
85.图17为喷枪本体另一实施例的内部结构的局部示意图;
86.图18为泄压组件的部分结构示意图;
87.图19为图18另一视角的结构示意图;
88.图20为图18又一视角的结构示意图;
89.图21为泄压喷枪的结构示意图;
90.图22为图21沿b-b方向的剖视图;
91.图23为泄压喷枪一实施例的内部结构的局部示意图;
92.图24为泄压喷枪另一实施例的内部结构的局部示意图;
93.图25为图1中agv小车的结构示意图;
94.图26为图25的部分结构示意图。
95.附图标号说明:
96.1、机体;11、主电池柜;2、料桶机构;21、涂料泵送管路;22、桶本体;221、涂料容放腔;222、涂料释放口;223、余料检测口;224、防污管;224a、第一管段;224b、第二管段;224c、涂料清洗口;224d、检测管道;23、搅拌组件;231、搅拌件;231a、转动杆;231b、连接杆;231c、桶壁刮片;231d、角度调节结构;231e、搅拌叶;232、搅拌电机;24、翻盖传感器;25、截止阀;26、涂料过滤件;3、涂料机构;31、泵送组件;311、油泵电机;312、油泵;313、液压站;314、马达进油管;315、液压马达部件;316、马达回油管;317、回油过滤器;318、涂料泵柱塞杆;319、涂料泵部件;310、高压过滤器;32、涂料喷枪;321、喷枪本体;321a、进料口;321b、出料口;321c、第一导向槽;321d、抽拉过孔;322、第一枪针件;322a、第一推杆部;322b、第一密封部;323、第一驱动组件;323a、伺服电动缸;323b、第一拉轴;323c、第一安装座;323d、第一弹性复位件;323e、第一喷枪扳机;323f、第一扳机销轴;324、腔体;324a、过料通道;324b、传动通道;325、过料间隙;326、第一弹性件安装腔;327、进料管;328、第一转接头;329、第二转接头;4、泄压机构;41、泄压组件;411、泄压喷枪;411a、泄压进口;411b、泄压出口;411c、第二导向槽;411d、滑动过孔;412、第二枪针件;412a、第二推杆部;412b、第二密封部;413、第二驱动组件;413a、舵机;413b、第二拉轴;413c、第二安装座;413d、第二弹性复位件;413e、第二喷枪扳机;413f、第二喷枪扳机销轴;414、泄压腔;414a、过压通道;414b、连接通道;415、过压间隙;416、第二弹性件安装腔;42、泄压管路;43、泄压回料管路;5、升降系统;51、丝杆模组;52、拖链;53、升降电机;54、盘管组件;55、机械臂;56、升降支架;57、升降滑台;6、压力检测器;7、余料检测器;8、agv小车;81、agv底盘;811、承载面;812、底面;813、车轮安装位;82、前侧车轮组;821、前侧驱动轮;822、前侧从动轮;83、浮动结构;84、后侧驱动轮;85、后侧从动轮;86、防撞件;87、副电池柜
97.本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
98.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
99.需要说明,若本发明实施例中有涉及方向性指示(诸如上、下、左、右、前、后
……
),则该方向性指示仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、
运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
100.另外,若本发明实施例中有涉及“第一”、“第二”等的描述,则该“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
101.本发明提出一种涂敷机器人。
102.在本发明实施例中,如图1至26所示,该涂敷机器人包括机体1、料桶机构2、涂料机构3和泄压机构4,进一步地,涂敷机器人还包括升降系统5、控制系统和agv(automated guided vehicle,简称agv)小车8等等,具体参见下文详述。
103.具体地,料桶机构2设有涂料容放腔221和涂料泵送管路21,涂料容放腔221与涂料泵送管路21的进料端连通。其中,涂料容放腔221用于存放涂料(例如但不限于腻子、界面剂和乳胶漆等等),具体而言,涂料容放腔221的腔底壁设有涂料释放口222,该涂料释放口222用于与涂料泵送管路21的进料端连通。
104.具体地,涂料机构3包括泵送组件31和涂料喷枪32,涂料喷枪32与涂料泵送管路21的出料端相连,泵送组件31设于涂料泵送管路21,以为涂料从涂料容放腔221到涂料喷枪32的流动提供动力,涂料喷枪32具有供涂料流出的打开状态,和具有防止涂料流出的关闭状态。具体而言,在打开状态下,涂料喷枪32启动,涂料泵送管路21经由涂料喷枪32与外界连通,此时,在泵送组件31的作用下,涂料可经由涂料泵送管路21从涂料容放腔221流动到涂料喷枪32上,随后被涂料喷枪32喷出至待涂敷的墙面上;在关闭状态下,涂料喷枪32关闭,涂料泵送管路21无法经由涂料喷枪32与外界连通,此时,涂料无法流动至涂料喷枪32上进行喷出。通常来讲,为了确保在涂料喷枪32启动的瞬间,涂料能够及时地流动至涂料喷枪32上进行喷出,于本实施例中,泵送组件31时刻保持着运行状态。
105.具体地,料桶机构2安装在机体1上,机体1上设有升降系统5,其主要部件有:丝杆模组51、拖链52、升降电机53、盘管组件54、机械臂55、升降支架56、升降滑台57等。其中,机械臂55与涂料喷枪32相连。升降系统5通过螺栓与机体1的骨架相连,其主要功能是驱动机械臂55进行升降,并结合机械臂55伸展动作,使得涂敷施工作业可以覆盖墙面的上部和下部。丝杆模组51包含丝杆、丝母等部件,组合形成丝杠传动组件,传动精度高,运行平稳,机械效率高,工作可靠。丝杆动力来自于升降电机53,升降电机53经过减速机增加扭矩并经同步带、同步轮传递给丝杆,使得丝杆根据需要进行传动,从而实现升降滑台57的升降运动。而机械臂55安装在升降支架56上,然后一起装配到升降滑台57,机械臂55得以跟随滑台进行升降。优选地,机械臂55使用六轴机械臂55,六轴机械臂55可以实现空间各种复杂的姿态控制,满足涂料喷枪32进行喷涂立墙、天花板、横梁、飘窗、过道等各种建筑墙面的腻子涂敷施工作业。盘管组件54固定在丝杆模组51背面,便于涂料泵送管路21的管道在此处盘绕规整,然后经拖链52布置到机械臂55及涂料喷枪32,拖链52除了布置管路,还可以布置线缆,确保了管路、线路走位规范并可配合跟随机械臂55升降运动,避免造成管线拉扯。
106.具体地,泄压机构4包括泄压组件41和泄压管路42,泄压管路42的进料端与泵送组件31的出料端连通,泄压组件41设于泄压管路42,泄压组件41被配置为在涂料喷枪32处于
关闭状态时,打开泄压管路42。不难理解,在涂料喷枪32关闭时,因为泵送组件31会对涂敷料管内的涂料不断施压,此时,若涂敷料管内的涂料(下文以该涂料为腻子进行举例)不流动,则腻子浆料便会不断泌水(泌水:腻子浆料为腻子和水的混合物,当涂料喷枪32长时间处于阀口关闭保压,且阀口密封部位存在轻微磨损等导致轻微渗漏时,水分就会在高压作用下从阀口缝隙分泌出去,而存在一定颗粒度的腻子却无法通过,导致腻子浆料中的水分流失,腻子浆就会被高压越挤越硬,最终结团、结块),造成涂料泵送管路21、涂料喷枪32等被堵塞,基于此,本技术的发明通过设置泄压管路42和泄压组件41,以在涂料喷枪32关闭时(即涂敷料管内的涂料不流动时),使涂敷料管内的涂料能够从泄压管路42中流出,如此,保证了腻子可以一直处于流动状态,有效地防止腻子发生泌水凝固现象。
107.可以理解,本发明技术方案的涂敷机器人,通过设置与涂料容放腔221连通的涂料泵送管路21、及在涂料泵送管路21的出料端设置涂料喷枪32,在涂料泵送管路21中泵送组件31的施压下,涂料喷枪32可向待涂敷工位(例如但不限于墙壁等)喷涂涂料,如此,免去了施工工人需要在墙体上刮抹涂料的不便,有效地降低了工人们的施工作业劳动强度和提高了涂料涂敷工序的自动化水平;此外,本技术的涂敷机器人还通过设置与泵送组件31的出料端连通的泄压管路42和可控制泄压管路42的打开或关闭的泄压机构4,这样,在涂料喷枪32关闭时,便可基于打开泄压管路42而使涂料能够从涂料泵送管路21中流出,有效地防止腻子发生泌水凝固现象,提高产品的使用可靠性和使用安全性。
108.具体地,请参阅图4至图6,泵送组件31主要包括油泵电机311、油泵312、液压站313、马达进油管314、液压马达部件315、马达回油管316、回油过滤器317、涂料泵柱塞杆318、涂料泵部件319、高压过滤器310等结构组成,工作时,由油泵电机311输出动力,通过小带轮、皮带、大带轮传动驱动油泵312从液压站313进行泵油,液压油经油泵312出口、马达进油管314泵送至液压马达部件315进油腔,然后驱动液压马达在缸内进行往复直线运动,同时液压马达部件315缸内的液压油经马达回油管316输送至回油过滤器317进行杂质过滤后再流回液压站313。液压马达带动涂料泵柱塞杆318在柱塞缸内往复运动,使得涂料泵部件319可以从料桶抽吸腻子浆,并经高压过滤器310(高压过滤器310可以对泵送出来的腻子进行过滤,避免杂质输送至涂料喷枪32时造成堵塞)进行杂质过滤后由管道输送至涂料喷枪32进行喷涂作业。液压泵送系统还设有溢流调压组件,可以根据施工需要调节压力的大小。
109.在一些实施例中,请参阅图12至图17,涂料喷枪32包括喷枪本体321、第一枪针件322和第一驱动组件323;喷枪本体321内设有腔体324,喷枪本体321上设有与腔体324连通的进料口321a和出料口321b,进料口321a与涂料泵送管路21的出料端连通;第一枪针件322可活动地安装于腔体324,第一枪针件322与腔体324的腔壁配合形成有过料间隙325,在打开状态,第一枪针件322移动以打开出料口321b,在关闭状态,第一枪针件322移动以关闭出料口321b;第一驱动组件323与第一枪针件322传动连接,以带动第一枪针件322移动打开或关闭出料口321b。
110.具体地,第一枪针件322可活动地安装于腔体324中是指:在本实施例的一些实施方式中,第一枪针件322可以以抽拉连接、滑动连接或转动连接等连接方式中的任一种方式安装于腔体324中,以实现自身在腔体324中可移动的技术效果。
111.具体地,在本实施例的一些实施方式中,第一驱动组件323可以通过电缸驱动、舵机413a驱动等方式实现驱动第一枪针件322移动的技术效果,对此不作限制。
112.具体而言,在施工过程中,当需要向待涂敷墙面喷涂涂料时,便可启动第一驱动组件323,以使其驱动第一枪针件322在腔体324中移动并打开出料口321b,如此,涂料泵送管路21内涂料在泵送组件31的施压下,便会依次通过进料口321a、腔体324和出料口321b流动到涂料喷枪32的外侧。当不需要向待施工工位喷涂涂料时,在本实施例的一些实施方式中,可通过关闭第一驱动组件323,以使其停止对第一枪针件322的驱动,在该实施方式中,可在涂料喷枪32上适应性地安装弹性件以驱动第一枪针件322移动至关闭出料口321b的位置,从而保证第一枪针件322与出料口321b之间密封的可靠性。在本实施例的另一些实施方式中,可通过启动第一驱动组件323,以使其驱动第一枪针件322在腔体324中移动并关闭出料口321b。具体以何种方式实现第一枪针件322的移动并将出料口321b密封的技术效果,依实际需求而定,对此不作限制。
113.可以理解,本实施例通过驱动第一枪针件322移动以打开或关闭与出料口321b的方式,实现了控制涂料泵送管路21内的涂料的喷出和控制涂料泵送管路21内的涂料停止流动的技术效果,具有结构简单、易于操作等优点,且因为枪针的结构相较于阀体结构而言,具有长度较长的优点,基于该优点,有利于降低第一枪针件322与第一驱动组件323之间传动连接的实现难度。
114.在一些实施例中,请参阅图15至图17,第一枪针件322包括第一推杆部322a和第一密封部322b,第一密封部322b设于第一推杆部322a,第一推杆部322a可抽拉地安装于腔体324,第一推杆部322a与第一驱动组件323传动连接,第一推杆部322a抽拉移动以带动第一密封部322b移动打开或关闭出料口321b。可以理解,第一推杆部322a与涂料喷枪32之间的抽拉连接方式是目前较为成熟一种活动连接方式,具有实施难度较低,连接可靠性较高等优点。应当说明的是,本技术的设计不限于此,于其他实施例中,也可以以转动连接的方式,实现第一推杆部322a与涂料喷枪32之间的活动连接。
115.在一些实施例中,请参阅图16和图17,腔体324与出料口321b之间设有第一导向槽321c,腔体324通过第一导向槽321c与出料口321b连通,第一导向槽321c从腔体324到出料口321b方向呈渐缩设置,第一密封部322b被配置为与第一导向槽321c的部分槽壁密封配合,以关闭出料口321b。具体而言,第一导向槽321c的槽深方向,即为第一推杆部322a的抽拉移动的方向。可以理解,因为工艺装配的误差、或者是部件自身的使用磨损等原因,均会导致第一推杆部322a、第一密封部322b在移动过程中出现偏移,如此,导致第一密封部322b无法与出料口321b准确对位以密封出料口321b,基于上述原因,本技术通过在腔体324与出料口321b之间设置第一导向槽321c,并使该第一导向槽321c在腔体324到出料口321b的方向上渐缩设置,如此,当第一密封部322b从腔体324出发,沿靠近出料口321b的方向移动时,即使第一密封部322b在移动过程中出现偏移现象,第一密封部322b也会在第一导向槽321c的槽壁的导向、纠偏作用下,顺利的移动到第一密封部322b的四周都接触到第一导向槽321c的槽壁的位置(也即第一密封部322b与第一导向槽321c的槽壁密封配合的位置),可见,本技术的方案能够有效地保证在第一密封部322b对出料口321b的密封的可靠性。当然,本技术的设计不限于此,于其他实施例中,第一密封部322b也可以直接与出料口321b的周缘密封配合。
116.在一些实施例中,请参阅图16和图17,第一密封部322b呈球状或类球状设置,第一导向槽321c的槽壁上具有与密封部的曲形表面密封配合的弧形面。可以理解,球状或者类
球状的第一密封部322b,其曲形表面与第一导向槽321c的槽壁之间是线性接触的关系,在第一密封部322b未移动到与第一导向槽321c的槽壁密封配合的位置上时,第一密封部322b与第一导向槽321c之间的线性接触有利于降低第一密封部322b与第一导向槽321c的槽壁之间所产生的移动摩擦力;在第一密封部322b移动到与第一导向槽321c的槽壁密封配合的位置上时,第一密封部322b与第一导向槽321c的槽壁之间线性接触,有利于避免腻子材料嵌入到第一密封部322b与第一导向槽321c的槽壁两者的接触部位之中,保证了第一密封部322b对出料口321b的密封可靠性的同时,又能够延长第一密封部322b、第一导向槽321c的使用寿命,此外,第一密封部322b与第一导向槽321c的槽壁之间线性密封出料口321b的方式,使得当第一密封部322b沿远离出料口321b方向移动时,能够在自身刚开始移动的瞬间便打开出料口321b,有效地避免了涂料喷枪32出现延时喷涂涂料的现象。值得说明的是,本技术的设计不限于此,于其他实施例中,第一密封部322b也可以呈其他形状设计,例如但不限于长方形或正方形等。
117.在一些实施例中,请参阅图16和图17,第一导向槽321c呈圆台状设置。可以理解,如此设置,有利于提高第一导向槽321c与球状或类球状的第一密封部322b两者配合的可靠性,同时,圆台状是一种规则的形状,采用该形状也便于第一导向槽321c在工艺上的成型。需要说明的是,本技术的设计不限于此,于其他实施例中,第一导向槽321c也可以呈其他形状设计,例如但不限于第一导向槽321c为正方形和圆台形的两种形状的槽体组合形成。
118.在一些实施例中,请参阅图16和图17,第一密封部322b与第一导向槽321c的槽壁密封配合的部分为金属材料,第一导向槽321c的槽壁上与第一密封部322b密封配合的部分为金属材料。可以理解,因为腻子不同于水、液压油等介质,腻子是厚浆性涂料,含有大量的重碳酸钙、滑石粉,颗粒度较大,在高压的情况下,腻子浆料流经腔体324、第一导向槽321c等部位时,对第一密封部322b和第一导向槽321c的槽壁有较大磨损,而非金属材料的容易受到磨损,无法保证第一密封部322b和第一导向槽321c的使用寿命。优选地,第一密封部322b和第一导向槽321c的槽壁均为金属材料。
119.可选地,该金属材料包括但不限于铁、铜或者不锈钢等材料。
120.在一些实施例中,请参阅图16和图17,第一推杆部322a和第一密封部322b一体成型。可以理解,一体式的枪针结构具有精度高、不用进行部件组装工序等优点。当然,本技术的设计不限于此,于其他实施例中,第一推杆部322a和第一密封部322b两者也可以分体设置,例如当不限于,在一些实施例中,第一推杆部322a设有第一嵌入槽,第一密封部322b嵌设于第一嵌入槽,不难理解,分体式的枪针结构,其部件可分开加工,具有生产简单、开模成本较低等优点。具体采用何种方式制成第一枪针件322,视实际需求而定,对此不作限制。
121.在一些实施例中,第一驱动组件323包括第一自动驱动件和第一传动件,第一自动驱动件通过第一传动件与第一推杆部322a相连。可以理解,采用自动驱动的方式实现第一推杆部322a的移动,即采用自动驱动的方式实现出料口321b的打开或关闭,能够有效地提高产品的自动化水平。
122.具体地,第一自动驱动件包括伺服电动缸323a,伺服电动缸323a的输出端与第一传动件传动连接,不难理解,伺服电动缸323a是目前运用较为广泛的一种自动驱动结构,具有结构成熟、使用可靠、响应性灵敏等优点。因为伺服电动缸323a的运行方式已被公众所熟知,在此不一一展开叙述。值得说明的是,于其他实施例中,也可以采用其他自动驱动结构
实现对第一推杆部322a的驱动,例如但不限于,第一自动驱动件包括舵机413a,舵机413a的输出端与第一传动件传动连接。
123.在一些实施例中,请参阅图15,腔体324包括过料通道324a和传动通道324b,过料通道324a的一端与出料口321b连通,过料通道324a的另一端通过抽拉过孔321d与传动通道324b连通,进料口321a与过料通道324a连通,第一推杆部322a的一端通过抽拉过孔321d,从过料通道324a伸入传动通道324b,第一密封部322b与第一推杆部322a上位于过料通道324a内的部分相连,第一推杆部322a上位于过料通道324a内的部分与过料通道324a的内壁配合形成过料间隙325;第一传动件部分伸入传动通道324b,并与位于传动通道324b内的第一推杆部322a相连。可以理解,抽拉过孔321d与第一推杆部322a滑动配合,当第一推杆部322a插入到抽拉过孔中321d中时,推杆部322a仅能够在抽拉过孔321d的轴向上滑动,如此,有效地保证了第一推杆部322a在腔体324内部移动方向的可靠性,此外,当第一推杆部322a部分位于抽拉过孔321d中时,能够有效地避免涂料从过料通道324a内流入到传动通道324b内,避免了涂料对第一传动件、第一传动件与第一推杆部322a连接部位造成干扰,有利于保证第一传动件与第一推杆部322a之间配合的稳定性,提高产品运行的可靠性。
124.在一些实施例中,请参阅图15,第一传动件包括第一拉轴323b,第一拉轴323b从传动通道324b远离过料通道324a的一侧伸入传动通道324b内,第一拉轴323b与第一推杆部322a相连,第一拉轴323b的外周壁凸设有第一安装座323c,第一拉轴323b的外周壁、第一安装座323c和传动通道324b的内壁共同配合形成有第一弹性件安装腔326;
125.第一驱动组件323包括设于第一弹性件安装腔326的第一弹性复位件323d,第一弹性复位件323d沿自身的弹性伸缩方向的一端与第一安装座323c连接,另一端与传动通道324b的内壁连接,第一弹性复位件323d被配置为向第一推杆部322a施加一弹性力,以驱动第一推杆部322a移动关闭出料口321b。
126.可以理解,当第一自动驱动组件停止对第一推杆部322a的驱动后,基于第一弹性复位件323d对第一安装座323c的弹性力,能够有效地使第一安装座323c、第一拉轴323b和第一推杆部322a沿向靠近第一导向槽321c方向移动,直至第一密封部322b与第一导向槽321c的槽壁密封配合,如此,实现在没有外力的作用下,涂料喷机能够时刻维持在出料口321b被密封的状态。
127.具体地,第一弹性复位件323d为套设于第一拉轴323b外周壁的弹簧。当然,于其他实施例中,第一弹性复位件323d也可以为橡胶等弹性材料。
128.具体地,第一安装座323c在第一拉轴323b的外周壁环绕设置,如此,以有效提高第一弹性复位件323d与第一安装座323c之间的受力面积。
129.在一些实施例中,第一驱动组件323包括第一手动驱动件,第一手动驱动件可活动地安装于喷枪本体321,第一手动驱动件与第一拉轴323b传动连接,第一手动驱动件被配置为移动以带动第一推杆部322a移动打开出料口321b。可以理解,施工工人可通过第一手动驱动件,手动地驱动第一推杆部322a移动以使出料口321b被打开,而后进行腻子涂敷工序。结合上文,应当理解的是,本技术驱动第一推杆部322a移动的方式有自动和手动两个驱动方式,当其中的一种驱动方式出现故障时,便可基于另外一种驱动方式进行腻子涂敷工序,如此,避免了在一些使用场景中,出现涂料喷枪32无法使用的状况,有效地保证了涂料喷枪32的使用可靠性。
130.具体地,请参阅图14和图15,手动驱动件包括第一喷枪扳机323e和第一扳机销轴323f,第一喷枪扳机323e转动安装在喷枪本体321上,第一扳机销轴323f可移动地安装在喷枪本体321上,第一扳机销轴323f的一端伸入传动通道324b内与第一安装座323c相连,第一扳机销轴323f的另一端设于喷枪本体321外侧,第一喷枪扳机323e可转动抵接第一扳机销轴323f的另一端,以使第一扳机销轴323f的一端沿远离出料口321b方向移动。实际操作时,施工工人可通过按压第一喷枪扳机323e使其转动,当第一喷枪扳机323e转动到与第一扳机销轴323f的另一端相抵接时,便可带动第一扳机销轴323f的一端、第一安装座323c、第一拉轴323b、第一推杆部322a、第一密封部322b均向远离出料口321b的方向移动,如此,实现出料口321b的打开,而后进行腻子涂敷工序。
131.在一些实施例中,请参阅图14,喷枪本体321的外侧设有进料管327,进料管327的一端与进料口321a连通,涂敷机器人包括第一转接头328和第二转接头329,进料管327的另一端与第一转接头328的一端可拆配合,第一转接头328的另一端与第二转接头329的一端可拆配合,第二转接头329的另一端与涂料泵送管路21的出料端可拆配合,第一转接头328和第二转接头329共同配合形成有连通涂料泵送管路21的出料端和进料管327的进料通道。可以理解,在实际使用过程中,涂料喷枪32需要拆卸下来进行维护的频率较高,而涂料喷枪32拆卸下来的工序则会涉及到进料管327与涂料泵送管路21的管道之间的拆装,如果没有第一转接头328和第二转接头329进行转接,进料管327将直接与涂料泵送管路21的管道连接,在拆卸频率较高的情况下,会加速进料管327与涂料泵送管路21的管道的连接处出现磨损,导致进料管327与涂料泵送管路21的管道都得进行更换,维护成本较高,而本技术增设了第一转接头328和第二转接头329之后,平常拆卸只需分离第一转接头328和第二转接头329即可,即使第一转接头328和第二转接头329两者的连接处出现损坏,那只需将第一转接头328和第二转接头329拆卸并更换即可,两个接头的成本相对昂贵的涂料喷枪32和涂料泵送管路21的管道的成本来说,要低的多,且拆装更换接头相较于拆装进料管327和涂料泵送管路21的管道而言会更加方便、且耗费时长更少。
132.在一些实施例中,第一转接头328设有第一螺纹,第二转接头329设有第二螺纹,第一螺纹与第二螺纹相适配。不难理解,第一转接头328和第二转接头329之间采用螺纹连接的方式进行连接,具有结构简单、连接可靠、拆装方便等优点。当然,于其他实施例中,第一转接头328与第二转接头329之间也可以通过过盈插接、卡接等连接方式实现连接,对此不作限制。
133.在一些实施例中,请参阅图18至图24,泄压组件41包括泄压喷枪411、第二枪针件412和第二驱动组件413,泄压喷枪411内设有泄压腔414,泄压喷枪411上设有与泄压腔414连通的泄压进口411a和泄压出口411b,泄压进口411a与泄压管路42的出料端连通;第二枪针件412可活动地设于泄压腔414,第二针枪件与泄压腔414的腔壁配合形成有过压间隙415,在关闭状态,第二枪针件412移动以打开泄压出口411b;第二驱动组件413与第二枪针件412传动连接,以带动第二枪针件412移动打开或关闭泄压出口411b。
134.具体地,第二枪针件412可活动地安装于泄压腔414中是指:在本实施例的一些实施方式中,第二枪针件412可以以抽拉连接、滑动连接或转动连接等连接方式中的任一种方式安装于泄压腔414中,以实现自身在泄压腔414中可移动的技术效果。
135.具体地,在本实施例的一些实施方式中,第二驱动组件413可以通过电缸驱动、舵
机413a驱动等方式实现驱动第二枪针件412移动的技术效果,对此不作限制。
136.具体而言,在施工过程中,当涂料喷机关闭时(即出料口321b被密封时),涂料泵送管路21内的涂料会停止流动,为了避免涂料泵送管路21内的涂料在压力的作用下出现泌水凝固现象,可通过启动第二驱动组件413的方式,使第二驱动组件413驱动第二枪针件412移动并打开泄压出口411b,如此,涂料泵送管路21的涂敷料管内的涂料便可向通过泄压管路42流动到泄压出口411b,如此,保证了涂料泵送管路21内的涂料或涂料容放腔221内的涂料的流动性,有利于防止涂料泵送管路21内的涂料或涂料容放腔221内的涂料出现泌水而凝固现象。
137.具体地,在本实施例的一些实施方式中,涂料容放腔221的腔壁上设有涂料回收口,涂料回收口与泄压出口411b连通。具体而言,涂料回收口和泄压出口411b之间设有泄压回料管路43。可以理解,从泄压出口411b流出的涂料,可经由泄压回料管路43、涂料回收口而流回涂料容放腔221中,在保证涂料的流动性的同时,实现涂料的回收利用。
138.具体地,在本实施例的另一些实施方式中,泄压出口411b也可以与其他存放桶相连,当涂料流动到存放桶中后,可基于实际需求而处理存放桶中的涂料,例如但不限于,将存放桶中的涂料倒回涂料容放腔221中。
139.可以理解,本实施例通过驱动第二枪针件412移动以打开泄压出口411b的方式,实现了控制泄压管路42的打开效果,具有结构简单等优点,且因为枪针的结构相较于阀体结构而言,具有长度较长的优点,基于该优点,有利于降低第二枪针件412与第二驱动组件413之间传动连接的实现难度。
140.在一些实施例中,请参阅图23和图24,第二枪针件412包括第二推杆部412a和第二密封部412b,第二密封部412b设于第二推杆部412a,第二推杆部412a可抽拉地安装于泄压腔414,第二推杆部412a与第二驱动组件413传动连接,第二推杆部412a抽拉移动以带动第二密封部412b打开或关闭泄压出口411b。可以理解,第二推杆部412a与泄压喷枪411之间的抽拉连接方式是目前较为成熟一种活动连接方式,具有实施难度较低,连接可靠性较高等优点。应当说明的是,本技术的设计不限于此,于其他实施例中,也可以以转动连接的方式,实现第二推杆部412a与泄压喷枪411之间的活动连接。
141.在一些实施例中,请参阅图23和图24,泄压腔414和泄压出口411b之间设有第二导向槽411c,泄压腔414通过第二导向槽411c与泄压出口411b连通,第二导向槽411c从泄压腔414到泄压出口411b方向呈渐缩设置,第二密封部412b被配置为与第二导向槽411c的部分槽壁密封配合,以关闭泄压出口411b。具体而言,第二导向槽411c的槽深方向,即为第二推杆部412a的抽拉移动的方向。可以理解,因为工艺装配的误差、或者是部件自身的使用磨损等原因,均会导致第二推杆部412a、第二密封部412b在移动过程中出现偏移,如此,导致第二密封部412b无法与泄压出口411b准确对位以密封泄压出口411b,基于上述原因,本技术通过在泄压腔414与泄压出口411b之间设置第二导向槽411c,并使该第二导向槽411c在泄压腔414到泄压出口411b的方向上渐缩设置,如此,当第二密封部412b从泄压腔414出发,沿靠近泄压出口411b的方向移动时,即使第二密封部412b在移动过程中出现偏移现象,第二密封部412b也会在第二导向槽411c的槽壁的导向、纠偏作用下,顺利的移动到第二密封部412b的四周都接触到第二导向槽411c的槽壁的位置(也即第二密封部412b与第二导向槽411c的槽壁密封配合的位置),可见,本技术的方案能够有效地保证在第二密封部412b对泄
压出口411b的密封的可靠性。当然,本技术的设计不限于此,于其他实施例中,第二密封部412b也可以直接与泄压出口411b的周缘密封配合。
142.在一些实施例中,请参阅图23和图24,第二密封部412b呈球状或类球状设置,第二导向槽411c的槽壁上具有与第二密封部412b的曲形表面密封配合的弧形面。可以理解,球状或者类球状的第二密封部412b,其曲形表面与第二导向槽411c的槽壁之间是线性接触的关系,在第二密封部412b未移动到与第二导向槽411c的槽壁密封配合的位置上时,第二密封部412b与第二导向槽411c之间的线性接触有利于降低第二密封部412b与第二导向槽411c的槽壁之间所产生的移动摩擦力;在第二密封部412b移动到与第二导向槽411c的槽壁密封配合的位置上时,第二密封部412b与第二导向槽411c的槽壁之间线性接触,有利于避免腻子材料嵌入到第二密封部412b与第二导向槽411c的槽壁两者的接触部位之中,保证了第二密封部412b对泄压出口411b的密封可靠性的同时,又能够延长第二密封部412b、第二导向槽411c的使用寿命,此外,第二密封部412b与第二导向槽411c的槽壁之间线性密封泄压出口411b的方式,使得当第二密封部412b沿远离泄压出口411b方向移动时,能够在自身刚开始移动的瞬间便打开泄压出口411b,有效地避免了涂料喷枪32出现延时喷涂涂料的现象。值得说明的是,本技术的设计不限于此,于其他实施例中,第二密封部412b也可以呈其他形状设计,例如但不限于长方形或正方形等。
143.在一些实施例中,请参阅图23和图24,第二导向槽411c呈圆台状设置。可以理解,如此设置,有利于提高第二导向槽411c与球状或类球状的第二密封部412b两者配合的可靠性,同时,圆台状是一种规则的形状,采用该形状也便于第二导向槽411c在工艺上的成型。需要说明的是,本技术的设计不限于此,于其他实施例中,第二导向槽411c也可以呈其他形状设计,例如但不限于第二导向槽411c为正方形和圆台形的两种形状的槽体组合形成。
144.在一些实施例中,请参阅图23和图24,第二密封部412b与第二导向槽411c的槽壁密封配合的部分为金属材料,第二导向槽411c的槽壁上与第二密封部412b密封配合的部分为金属材料。可以理解,因为腻子不同于水、液压油等介质,腻子是厚浆性涂料,含有大量的重碳酸钙、滑石粉,颗粒度较大,在高压的情况下,腻子浆料流经腔体324、第二导向槽411c等部位时,对第二密封部412b和第二导向槽411c的槽壁有较大磨损,而非金属材料的容易受到磨损,无法保证第二密封部412b和第二导向槽411c的使用寿命。优选地,第二密封部412b和第二导向槽411c的槽壁均为金属材料。
145.可选地,该金属材料包括但不限于铁、铜或者不锈钢等材料。
146.在一些实施例中,请参阅图23和图24,第二推杆部412a和第二密封部412b一体成型。可以理解,一体式的枪针结构具有精度高、不用进行部件组装工序等优点。当然,本技术的设计不限于此,于其他实施例中,第二推杆部412a设有第二嵌入槽,第二密封部412b嵌设于第二嵌入槽。不难理解,分体式的枪针结构,其部件可分开加工,具有生产简单、开模成本较低等优点。具体采用何种方式制成第二枪针件412,视实际需求而定,对此不作限制。
147.在一些实施例中,第二驱动组件413包括第二自动驱动件和第二传动件,第二自动驱动件通过第二传动件与第二推杆部412a传动连接。可以理解,采用自动驱动的方式实现第二推杆部412a的移动,即采用自动驱动的方式实现泄压出口411b的打开或关闭,能够有效地提高产品的自动化水平。
148.具体地,第二自动驱动件包括舵机413a,舵机413a的输出端与第二传动件传动连
接,不难理解,舵机413a是目前运用较为广泛的一种自动驱动结构,具有结构成熟、使用可靠、响应性灵敏等优点。因为舵机413a的运行方式已被公众所熟知,在此不一一展开叙述。值得说明的是,于其他实施例中,也可以采用其他自动驱动结构实现对第二推杆部412a的驱动,例如但不限于,第二自动驱动件包括伺服电动缸323a,伺服电动缸323a的输出端与第二传动件传动连接。
149.在一些实施例中,请参阅图22,泄压腔414包括过压通道414a和连接通道414b,过压通道414a的一端与泄压出口411b连通,过压通道414a的另一端通过滑动过孔411d与连接通道414b连通,泄压进口411a与过压通道414a连通,第二推杆部412a的一端通过滑动过孔411d,从过压通道414a伸入连接通道414b,第二密封部412b与第二推杆部412a上位于过压通道414a内的部分相连,第二推杆部412a上位于过压通道414a内的部分与过压通道414a的内壁配合形成过压间隙415;第二传动件部分伸入连接通道414b,并与位于连接通道414b内的第二推杆部412a相连。可以理解,滑动过孔411d与第二推杆部412a滑动配合,当第二推杆部412a插入到滑动过孔411d中时,第二推杆部412a仅能够在滑动过孔411d的轴向上滑动,如此,有效地保证了第二推杆部412a在腔体324内部移动方向的可靠性,此外,当第二推杆部412a部分位于滑动过孔411d中时,能够有效地避免涂料从过压通道414a内流入到连接通道414b内,避免了涂料对第二传动件、第二传动件与第二推杆部412a连接部位造成干扰,有利于保证第二传动件与第二推杆部412a之间配合的稳定性,提高产品运行的可靠性。
150.在一些实施例中,请参阅图22,第二传动件包括第二拉轴413b,第二拉轴413b设于连接通道414b内,第二拉轴413b与第二推杆部412a相连,第二拉轴413b的外周壁凸设有第二安装座413c,第二拉轴413b的外周壁、第二安装座413c和连接通道414b的内壁共同配合形成有第二弹性件安装腔416;
151.驱动组件包括设于第二弹性件安装腔416的第二弹性复位件413d,第二弹性复位件413d沿自身的弹性伸缩方向的一端与第二安装座413c连接,另一端与连接通道414b的内壁连接,第二弹性复位件413d被配置为向第二推杆部412a施加一弹性力,以驱动第二推杆部412a移动关闭泄压出口411b。
152.可以理解,当第二自动驱动组件停止对第二推杆部412a的驱动后,基于第二弹性复位件413d对第二安装座413c的弹性力,能够有效地使第二安装座413c、第二拉轴413b和第二推杆部412a沿向靠近第二导向槽411c方向移动,直至第二密封部412b与第二导向槽411c的槽壁密封配合,如此,实现在没有外力的作用下,泄压喷机能够时刻维持在泄压出口411b被密封的状态。
153.具体地,第二弹性复位件413d为套设于第二拉轴413b外周壁的弹簧。当然,于其他实施例中,第二弹性复位件413d也可以为橡胶等弹性材料。
154.具体地,第二安装座413c在第二拉轴413b的外周壁环绕设置,如此,以有效提高第二弹性复位件413d与第二安装座413c之间的受力面积。
155.在一些实施例中,请参阅图21,第二传动件包括第二喷枪扳机413e,第二喷枪扳机413e可活动地安装于泄压喷枪411,第二拉轴413b和自动驱动件均与第二喷枪扳机413e传动连接,第二喷枪扳机413e被配置为带动第二推杆部412a移动,以打开泄压出口411b。可以理解,在使用过程中,可通过第二自动驱动件实现对第二喷枪扳机413e的自动驱动,也可通过施工工人手动移动第二喷枪扳机413e的方式,打开泄压出口411b。结合上文,应当理解的
是,本技术驱动第二推杆部412a移动的方式有自动和手动两个驱动方式,当第二自动驱动件出现故障时,亦可进行手动拨动第二喷枪扳机413e进行泄压等操作(手动泄压和涂料喷枪32一样),便于维保维修,既满足了现代自动化施工要求,也避免了自动控制机构故障时,无法及时泄压而不便于维修保养(高压危险)的问题,且长时间憋压易造成腻子在泄压喷枪411内部结块,造成堵塞。
156.具体地,请参阅图21和图22,第二传动件包括第二扳机销轴,第二喷枪扳机413e转动安装在泄压喷枪411上,第二扳机销轴可移动地安装在泄压喷枪411上,第二扳机销轴的一端伸入传动通道324b内与第二安装座413c相连,第二扳机销轴的另一端设于泄压喷枪411外侧,第二喷枪扳机413e可转动抵接第二扳机销轴的另一端,以使第二扳机销轴的一端沿远离泄压出口411b方向移动。实际操作时,施工工人可通过按压第二喷枪扳机413e使其转动,当第二喷枪扳机413e转动到与第二扳机销轴的另一端相抵接时,便可带动第二扳机销轴的一端、第二安装座413c、第二拉轴413b、第二推杆部412a、第二密封部412b均向远离泄压出口411b的方向移动,如此,实现泄压出口411b的打开。
157.在一些实施例中,请参阅图18和图20,涂敷机器人包括压力检测器6和第一控制器,压力检测器6和泄压机构4均与第一控制器电连接,压力检测器6被配置为检测涂料泵送管路21内或泄压管路42内的压力,并在检测到的压力大于或等于预设压力时,向第一控制器发送打开信号,第一控制器被配置为在接收到打开信号时控制泄压机构4打开泄压管路42。
158.具体地,在本实施例的一些实施方式中,压力检测器6可以设置在泄压管路42上,在本实施例中另一些实施方式中,压力检测器6可以设置在涂料泵送管路21上,对此不作限制。具体而言,该压力检测器6可以为压力传感器、重力传感器中的任一者。
159.可以理解,本技术的方案基于压力检测器6对管路内的压力进行检测,并在压力检测过后基于第一控制器对所检测数据的获取、分析和处理,以便于在涂料泵送管路21内或泄压管路42内的压力大于预设压力值时,自动化的打开泄压管路42进行泄压,有效地提高了产品运行的自动化水平。
160.在一些实施例中,泄压机构4被配置为当涂料喷枪32处于打开状态时,关闭泄压管路42。具体地,当涂料喷枪32处于打开状态时,也即涂料喷枪32在进行喷涂作业,涂料泵送管路21需要较大压力以保证涂料流动至涂料喷枪32上进行喷出,此时泄压管路42处于关闭状态,能够避免分掉涂料泵送管路21中的部分压力。
161.具体地,当本实施例中采用前文所述的压力检测器6和第一控制器时,压力检测器6可在检测到涂料泵送管路21内或泄压管路42内的压力小于预设压力时,向第一控制器发送关闭信号,第一控制器被配置为在接收到关闭信号时控制泄压机构4关闭泄压管路42。
162.需要特别指出的是,从附图15和附图22上看,涂料喷枪32和泄压喷枪411两者的内部结构相似,是考虑到在同一台涂敷机器上,尽量采用相同、相近或者类似的结构,以降低开发人员对涂料喷枪32和泄压喷枪411的开发难度,便于涂料喷枪32和泄压喷枪411两者采用同种零部件、同种组装工艺进行组装,和采用同种维修工艺进行维修,且涂料喷枪32和泄压喷枪411两者的大多数零部件相同也便于采购。本领域技术人员应当理解的是,虽然涂料喷枪32和泄压喷枪411两者的内部构造相似,但两者在涂敷机器人上所产生的作用并不相同,本领域技术人员不应当将两者当作简单的等同替换。
163.在一些实施例中,请参阅图7,料桶机构2包括桶本体22和搅拌组件23,涂料容放腔221形成于桶本体22,搅拌组件23包括搅拌件231,搅拌件231可活动地设于涂料容放腔221,以搅拌存放于涂料容放腔221内的涂料。
164.具体地,在本实施例的一些实施方式中,搅拌件231可转动地设置在涂料容放腔221中,在本实施例的另一些实施方式中,搅拌件231沿上下方向、左右方向或沿其他方向可滑动地设置在涂料容放腔221中,上述的实施方式均可实现搅拌件231在涂料容放腔221中可活动的技术效果,具体采用何种实施方式在此不做限制。
165.可以理解,桶本体22中添加腻子浆料后,若腻子浆料长时间处于静置状态,腻子浆料容易凝固、粘结,基于此,本技术通过在桶本体22中设置可活动的搅拌件231,以对存放在桶本体22中的腻子浆料进行搅拌,有效地防止存放在桶本体22中的腻子浆料出现凝固、粘结现象。
166.在一些实施例中,请参阅图7,搅拌组件23包括搅拌电机232,搅拌电机232设于桶本体22,搅拌电机232的输出轴与搅拌件231相连,以驱动搅拌件231在涂料容放腔221内转动。可以理解,采用电机驱动搅拌件231转动是一种较为成熟的驱动实施方式,具有连接方便、实施简单和驱动可靠等优点。值得说明的是,本技术的设计不限于此,于其他实施例中,也可以采用人工的方式驱动搅拌件231转动,对此不作限制。
167.在一些实施例中,请参阅图7,桶本体22具有桶盖,桶盖上设有翻盖传感器24,翻盖传感器24用于在检测到工人打开桶盖时,向第一控制器发送信号,第一控制器识别信号后向搅拌电机232发送指令,搅拌电机232就会停止工作,搅拌件231也就停止转动,避免翻盖后人体进入搅拌区域造成人身伤害。
168.在一些实施例中,请参阅图9,搅拌件231包括转动杆231a、连接杆231b和桶壁刮片231c,转动杆231a沿桶本体22的高度方向延伸,转动杆231a与搅拌电机232的输出轴连接,连接杆231b的一端与转动杆231a相连,连接杆231b的另一端沿靠近桶本体22的周壁方向延伸,桶壁刮片231c的一端与连接杆231b的另一端连接,桶壁刮片231c的另一端沿桶本体22的高度方向延伸,桶壁刮片231c背向转动杆231a的一侧被配置为与桶本体22的周壁抵接,以在转动杆231a转动时,刮涂桶本体22的周壁。应当理解的是,当搅拌电机232启动时,转动杆231a绕竖向轴转动,进而带动连接杆231b及连接杆231b末端的桶壁刮片231c开始转动,在转动的过程中,因为桶壁刮片231c的一侧会与桶本体22的周壁相抵接,如此,能够对桶本体22的周壁进行刮抹,有利于防止腻子粘结在桶壁上而结块,影响腻子浆料的质量(凝固、粘结均会影响涂料在涂料泵送管路21内的流动)以及作业后料桶的清洗清洁。
169.具体地,桶本体22的周壁呈圆柱状设置,以便于桶壁刮片231c在转动的过程中对桶的全部周壁进行刮抹。
170.具体地,桶壁刮片231c为柔性材料(例如但不限于橡胶等),如此设置,以避免桶壁刮片231c对桶本体22的周壁造成刮痕。
171.在一些实施例中,请参阅图9,搅拌件231包括角度调节结构231d,连接杆231b通过角度调节结构231d与桶壁刮片231c相连,角度调节结构231d被配置使桶壁刮片231c与连接杆231b之间的连接角度可调节。可以理解,如此设置,以便于施工人员基于实际使用环境调整桶壁刮片231c与桶本体22之间的贴近程度和贴合面积。
172.在一些实施例中,请参阅图9,搅拌件231包括转动杆231a和至少两个搅拌叶231e,
转动杆231a的一端与搅拌电机232的输出轴连接,至少两个搅拌叶231e分别在转动杆231a的长度方向上间隔设置。可以理解,通过设置至少两个搅拌叶231e,有利于搅拌件231在桶本体22中进行多位置搅拌。当然,本技术的设计不限于此,于其他实施例中,也可以仅设置一个搅拌叶231e。
173.优选地,于本技术的实施例中,搅拌叶231e呈板状设计。如此,以提高搅拌叶231e与腻子浆料之间的接触面积,使得搅拌件231能在桶本体22内对腻子浆料进行充分地搅合,有利于避免桶本体22内的腻子浆料出现结团、结块的现象。
174.在一些实施例中,请参阅图8,涂敷机器人包括余料检测器7、报警机构和第二控制器,余料检测器7和报警机构均与第二控制器电连接;
175.余料检测器7被配置为检测涂料容放腔221内的涂料存放量,并在涂料存放量低于预设存放量时,向第二控制器发送报警信号,第二控制器在接收到报警信号时,控制报警机构启动以报警。值得说明的是,第二控制器与前文所述的第一控制器,两者可以为同一个控制器。
176.具体地,在本实施例的一些实施方式中,报警机构可以以灯光报警的方式进行报警,相应地,在该实施方式中,报警机构包括报警灯,在本实施例的另一些实施方式中,报警机构可以以声音报警的方式进行报警,相应地,在该实施方式中,报警机构包括蜂鸣器。在本实施例的又一些实施方式中,报警机构的报警方式可以为灯光报警和声音报警两者的结合。
177.可以理解,如此设置,有助于在涂料容放腔221内的涂料余量过少时,告知工作人员进行添料。
178.进一步地,在一些实施例中,涂敷机器人包括显示设备(例如但不限于显示屏),显示设备用于显示涂料的余量信息,便于工作人员实时观察读数。
179.在一些实施例中,请参阅图8,余料检测器7包括激光传感器,涂料容放腔221的腔顶壁上设有余料检测口223,激光传感器设于涂料容放腔221的外侧,激光传感器的检测端朝向余料检测口223设置。具体而言,激光传感器发射激光束到桶内,照射到腻子浆料液面后激光束反射回到激光传感器,从而可以检测出腻子浆料的液面高度,再通过内部程序换算得到腻子的体积、重量等数据。可以理解,采用激光传感器检测涂料余量的技术手段,具有实施方便,检测可靠等优点。值得说明的是,本技术的设计不限于此,于其他实施例中,余料检测器7包括重力传感器,重力传感器设置在涂料容放腔221中,重力传感器通过检测腻子涂料的重力信息,再通过内部程序换算得到腻子的体积、重量等数据。
180.在一些实施例中,请参阅图8,激光传感器与余料检测口223在料桶机构2的高度方向上间隔设置,激光传感器与余料检测口223之间设有防污管224,防污管224形成有连通激光传感器的检测端和涂料容放腔221的检测管道。可以理解,因为腻子浆料在桶本体22中被搅拌,通过使激光传感器和余料检测口223两者间隔设置,有利于避免搅拌的腻子飞洒粘粘在激光传感器上,同时,适应性地在激光传感器和余料检测口223两者之间设置防污管224,也能够进一步避免腻子飞洒至激光传感器上,进而提高激光传感器的使用安全性。
181.在一些实施例中,请参阅图8,防污管224包括第一管段224a和第二管段224b,第二管段224b的周壁开设有涂料清洗口224c,第一管段224a可开合地设于涂料清洗口224c,在第二管段224b盖合于涂料清洗口224c时,第一管段224a和第二管段224b共同配合形成有检
测管道224d。
182.具体地,本实施例的一些实施方式中,第一管段224a和第二管段224b滑动配合,第一管段224a相较于第二管段224b滑动以打开或关闭涂料清洗口224c;在本实施例的另一些实施方式中,第一管段224a和第二管段224b铰接配合,第一管段224a转动以打开或关闭涂料清洗口224c;本实施例的又一些实施方式中,第一管段224a和第二管段224b可拆配合,第一管段224a从第二管段224b上拆出以打开涂料清洗口224c、第一管段224a安装到第二管段224b上以关闭涂料清洗口224c。
183.可以理解,因为腻子浆料会在桶本体22中被搅拌,在被搅拌的过程中,腻子浆料有可能被甩到防污管224的内壁(即检测管道224d的内壁)上,这会影响激光传感器将检测光线照射到桶本体22内,进而降低了激光传感器的检测结果的准确性,基于此,本技术通过将防污管224设置成第一管段224a和第二管段224b,并使第一管段224a可开合地设置在第二管段224b的涂料清洗口224c处,如此,当第一管段224a打开涂料清洗口224c时,工作人员便可基于第二管段224b上的涂料清洗口224c,对粘附在第二管段224b的内壁上的腻子残料进行清除,如此,有利于保证防污管224内的检测管道224d的通畅,进而保证激光传感器检测结果的准确性。此外,工作人员在清洗防污管224时,也不用特意地将防污管224整体地从机体1上拆除,仅需移动第一管段224a便可进行清洗作业,在清洗过后,仅需移动第一管段224a以使第一管段224a复位至关闭涂料清洗口224c处即可,过程易于操作、步骤简单。
184.在一些实施例中,请参阅图7,涂料泵送管路21上设有截止阀25,截止阀25被配置为打开或关闭涂料泵送管路21。具体而言,当需要清洗或维护涂料泵送管路21的管道时,可通过关闭截止阀25,防止桶本体22内部的浆料或水流出来影响操作。
185.具体地,截止阀25设置在涂料释放口222与涂料泵送管路21之间。
186.在一些实施例中,请参阅图7涂料泵送管路21内设有涂料过滤件26,涂料过滤件26被配置为过滤涂料中的颗状物。具体而言,涂料过滤件26可过滤腻子浆料中的砂石、大结块、粉团等杂质,确保泵送组件31所吸入的腻子质量,避免杂质进入泵送组件31会导致泵送组件31损坏、堵塞等故障。
187.在一些实施例中,请参阅图1、图2、图25和图26,涂敷机器人包括agv小车8,料桶机构2安装于agv小车8。可以理解,采用agv小车8带动机体1移动,具有安全性高、自动性水平高等优点。
188.在一些实施例中,请参阅图25,agv小车8包括agv底盘81,agv底盘81具有上下相对设置的承载面811和底面812,机体1安装于承载面811;底面812设有三个车轮安装位813,三个车轮安装位813在底面812上呈三角形布置。具体而言,车轮安装位813用于供车轮安装。可以理解,才有三点支撑的方式支撑agv底盘81进行行走,具有平衡性较高,转向方便等优点。当然,于其他实施例中,底面812也可以设置四个车轮安装位813,对此不作限制。
189.在一些实施例中,请参阅图25,agv小车8包括前侧车轮组82和浮动结构83,底面812的前侧区域设有一个车轮安装位813,前侧车轮组82通过浮动结构83安装于位于前侧区域的车轮安装位813,浮动结构83被配置为使前侧车轮组82在agv底盘81的高度方向上可移动。可以理解,当前侧车轮组82遇到路面不平,轮体落到凹坑或者压倒石子上时,轮体会随着浮动结构83翘起或者落到凹坑上,而不管是翘起还是陷入凹坑,agv底盘81前部受力都是落在浮动结构83的车轮安装位813上,agv底盘81整体始终为三点受力,不会发生较大的倾
斜,而整个机体1都是安装在agv底盘81上的,因此整个机体1也就得以保持平稳,不会发生较大倾斜甚至倾翻,稳定性好。
190.在一些实施例中,请参阅图25和图26,agv小车8包括后侧驱动轮84和后侧从动轮85,底面812的后侧区域设有两个车轮安装位813,后侧驱动轮84和后侧从动轮85与位于后侧区域上的两个车轮安装位813一一对应;前侧车轮组82包括前侧驱动轮821和前侧从动轮822,前侧驱动轮821和后侧驱动轮84斜对角设置,前侧从动轮822和后侧从动轮85斜对角设置。
191.具体地,驱动轮包括但不限于舵轮,从动轮包括但不限于万向轮等。
192.可以理解,agv底盘81的前侧和后侧均设置有舵轮,舵轮具备行走和旋转功能,agv底盘81的前侧和后侧均设置有万向轮,万向轮具有旋转功能,使得agv底盘81具备全向移动功能,可在平面内任意方向移动(平移、旋转),灵活性好。此外,采用驱动轮斜对角设置的结构方式,有利于避免agv底盘81出现同侧倾斜甚至倾翻的现象,稳定性好。
193.在一些实施例中,请参阅图25,agv底盘81的周缘凸设有防撞件86。防撞件86用于避免agv底盘81受到磕碰磨损。具体地,防撞件86可设置相应的传感器,并在其发生碰撞时,向控制系统发送信号以触发报警。
194.在一些实施例中,agv小车8具有激光导航功能,相应地,agv小车8上设有导航激光传感器,其可发射激光束并接收回波获取目标三维信息的系统,实现机器人自动导航,精准定位。
195.在一些实施例中,agv小车8采用bim技术,以实现对建筑进行三维建模,分析模拟机器人的动作、行走路径,进而在施工过程中避免机器人与建筑物发生碰撞干涉,bim技术与激光导航技术相结合,设定机器人运动程序、施工点位,使得机器人根据编制好的程序进行自动移动、施工作业,导航精度高。
196.综合上文,在一些实施例中,涂料机器人上的控制系统主要包括整机控制器、路由器、通讯模块、伺服驱动器、继电器、接触器、导航雷达、电池、机械臂55控制器以及相关电缆等。机体1上设有主电池柜11,agv小车8上设有副电池柜87,控制系统在整机上的布置如图1和图2。控制系统是涂敷机器人的“控制大脑”,实现了涂敷机器人各部分执行机构、机械臂55、agv小车8等的自动化、智能动作,可以确保机器人进行自动导航行走、自动施工作业。控制系统采用主电池、副电池双电池结构,主电池负责给耗电功率较大的泵送组件31专门供电,副电池给其余电气元器件供电,主、副电池电量充足情况下各司其职,分别供电。当其中一个电池(供给泵送组件31的电池)电量用完或者达到预设值(如剩10%电量)时,控制器则会发出指令,将另一个电池的电量调用过来,给泵送组件31供电,使得两个电池并联有序、高效工作,互不干扰。
197.以上所述仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是在本发明的发明构思下,利用本发明说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1