面向铁塔组立传感器唯一识别码生成方法
1.本发明属于传感器识别领域,具体涉及一种面向铁塔组立传感器唯一识别码生成方法。
背景技术:
2.铁塔的组立施工是输电线路建设工程中非常重要的环节,由于铁塔组立施工条件与环境复杂,内悬浮抱杆组立施工工艺由于对施工场地地形依赖小,得到了广泛运用。目前一些专利,如中国发明“基于物联网的内悬浮内拉线抱杆拉线检测和倾角检测系统”(申请号cn202010196998.2),中国发明“一种实时监测拉力与倾角的内悬浮内拉线组塔系统”(申请号:cn201910681928.3)已着重解决施工过程中抱杆及拉线状态监测,都使用了一组不同种类传感器安装在多个点位进行监测;由于需要不同种类传感器且同一类型传感器安装在不同点位,且通讯设备的mac硬件地址或随机数通用唯一识别码仅可做到设备差异化却无法有效标识设备功能,因此在设计或施工安装前需要耗费大量时间精力用于传感器、安装点位与数据接口对齐。通常的会使用不同软件配置的程序,或通过下发新的编号实现多传感器群的数据接口对齐;也会通过更改硬件设置区分不同种类传感器,但不能有效区分安装点位;且一旦出现传感器模块安装错位或配置错误的问题不易发现,且难以排查出问题点位。而铁塔组立传感器安装与其他运用场景相比,存在显著特征,不同种类传感器安装位置差异化显著,且同一类型传感器在安装和工作过程也有不同的位置;匹配难,效率低。
技术实现要素:
3.本发明的目的在于提供一种面向铁塔组立传感器唯一识别码生成方法,与预设数据接口自动匹配对齐,无需对传感器模块进行硬件软件上差异化配置。
4.本发明提供的这种面向铁塔组立传感器唯一识别码生成方法,包括如下步骤:
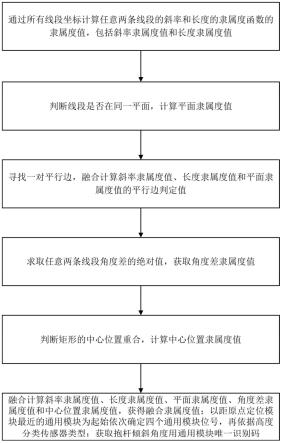
5.s1.通过所有线段坐标计算任意两条线段的斜率和长度的隶属度函数的隶属度值,包括斜率隶属度值和长度隶属度值;
6.s2.判断线段是否在同一平面,计算平面隶属度值;
7.s3.寻找一对平行边,融合计算斜率隶属度值、长度隶属度值和平面隶属度值的平行边判定值;
8.s4.求取任意两条线段角度差的绝对值,获取角度差隶属度值;
9.s5.判断矩形的中心位置重合,计算中心位置隶属度值;
10.s6.融合计算斜率隶属度值、长度隶属度值、平面隶属度值、角度差隶属度值和中心位置隶属度值,获得融合隶属度值;以距原点定位模块最近的通用模块为起始依次确定四个通用模块位号,再依据z轴高度分类传感器类型;获取抱杆倾斜角度用通用模块唯一识别码。
11.所述的步骤s1,包括通过所有线段坐标计算任意两条线段的斜率和长度的隶属度函数的隶属度值,包括斜率隶属度值μ1(ω1)和长度隶属度值μ2(ω2):
[0012][0013][0014]
其中,ω1表示第一直线li和第二直线lj的斜率反正切值差的绝对值;ω2表示第一直线li和第二直线lj的长度差值的绝对值;b表示角度差的阈值;c表示长度差的阈值。
[0015]
所述的步骤s2,包括判断线段是否在同一平面,计算平面隶属度值μ3(ω3):
[0016][0017]
其中,ω3表示第一直线li和第二直线lj的中点高度差;h表示高度阈值。
[0018]
所述的步骤s3,包括寻找一对平行边,融合计算斜率隶属度值μ1(ω1)、长度隶属度值μ2(ω2)和平面隶属度值μ3(ω3)的平行边判定值s1:
[0019]
s1=[μ
1-(1-μ1)]+[μ
2-(1-μ2)]+[μ
3-(1-μ3)]
[0020]
其中,若平行边判定值s1>0,d>0,则第一直线li和第二直线lj为一对平行边,其中d为第一直线li和第二直线lj的中点距离。
[0021]
所述的步骤s4,包括求取任意两条线段角度差的绝对值,角度差隶属度值μ4(ω4)为:
[0022][0023]
其中,ω4表示第一直线li和第二直线lj的角度差的绝对值。
[0024]
所述的s5,包括判断矩形的中心位置重合,计算中心位置隶属度值μ5(ω5):
[0025][0026]
其中,m表示中心点距离矩形长的阈值,n表示中心点距离矩形宽的阈值,n>m,ω5表示两对平行线对的对角线交点之间距离。
[0027]
所述的步骤s6,包括融合计算斜率隶属度值μ1(ω1)、长度隶属度值μ2(ω2)、平面隶属度值μ3(ω3)、角度差隶属度值μ4(ω4)和中心位置隶属度值μ5(ω5),获得融合隶属度值s:
[0028][0029]
其中,ω1表示第一直线li和第二直线lj的斜率反正切值差的绝对值;ω2表示第一直线li和第二直线lj的长度差值的绝对值;ω3表示第一直线li和第二直线lj的中点高度差;ω4表示第一直线li和第二直线lj的角度差的绝对值;ω5表示两对平行线对的对角线交点之间距离;若s》0,则4条线段可以组合成矩形。当s≤0时,4条线段无法组合成矩形;以距原
点定位模块最近的通用模块为起始依次确定四个通用模块位号,再依据z轴高度分类传感器类型;抱杆倾斜角度用通用模块唯一识别码由|za-zi|趋近于设定抱杆高度确定。
[0030]
本发明提供的这种面向铁塔组立传感器唯一识别码生成方法,生成唯一识别码与使用随机生成或直接使用mac地址的传统通用唯一识别码相比,利用定位原理生成唯一识别码,唯一识别码包含传感器类型、传感器位号解决了传统运用于内悬浮抱杆组塔传感器群难以配置管理的问题。
附图说明
[0031]
图1为本发明系统的结构示意图。
[0032]
图2为本发明系统实施例的安装位置示意图。
[0033]
图3为本发明方法的流程示意图。
具体实施方式
[0034]
如图1为本发明系统的结构示意图:本发明提供的这种基于多传感器融合的铁塔组立传感器群的自适应组网系统,包括若干个通用模块、通讯节点模块和现场监控平台;通讯节点模块分别连接通用模块和现场监控平台;通用模块通过传感器信号电路与拉力传感器、张力传感器连接,监测拉力大小及拉力方向;通用模块使用uwb模块进行组网通讯;通用模块与通讯节点模块通过uwb通讯,通讯节点模块通过串行或无线通讯与现场监控平台连接;现场监控平台运行的监控软件根据组网编号将数据分配到图形界面显示,并可跟据坐标姿态数据对组立阶段识别并展示,对线缆受力状况及姿态进行监测和展示,并进行警告。
[0035]
如图2为本发明系统实施例的安装位置示意图。1为拉力监测单元;2为抱杆上端姿态监测单元;3为抱杆;4为组塔吊件;5为内拉绳;6为张力监测单元;7为承托绳;8为抱杆下端姿态监测单元;9为用于uwb定位的通用模块;10为电脑;11为移动智能终端;12为通讯节点模块;13为拉力传感器;14为与拉力传感器连接的通用模块;15为张力传感器;16为与张力传感器连接的通用模块。通用模块安装在抱杆上,检测抱杆倾斜角度。
[0036]
通用模块包括用于uwb定位的通用模块、与拉力传感器连接的通用模块和与张力传感器连接的通用模块;每一个通用模块包括uwb无线通讯模组、倾斜度传感器、气压传感器、微控制器、传感器信号电路和电池模组;通讯节点模块包括uwb无线通讯模组、串行通讯模组或无线通讯模组;现场监控平台包括电脑和移动智能终端。
[0037]
通用模块通过uwb的到达时间差原理实现二维xy平面定位;所述通用模块通过气压传感器的气压差实现z轴高度定位;通用模块通过倾角传感器实现当前传感器安装位置姿态识别,具体包括:
[0038]
通用模块使用uwb模块进行组网通讯;利用4个所述用于uwb定位的通用模块对所有通用模块通过uwb的到达时间差原理实现二维xy平面定位;已知第一基站点的坐标(x1,y1)到通用模块(x,y)的距离r1;第二基站点的坐标(x2,y2)到通用模块(x,y)的距离r2;第三基站点的坐标(x3,y3)到通用模块(x,y)的距离r3;第四基站点的坐标(x4,y4)到通用模块(x,y)的距离r4:
[0039]
(x-x1)2+(y-y1)2=r
12
[0040]
(x-x2)2+(y-y2)2=r
22
[0041]
(x-x3)2+(y-y3)2=r
32
[0042]
(x-x4)2+(y-y4)2=r
42
[0043]
任两组数据计算可得当前模块(x,y)的坐标。
[0044]
通用模块通过气压传感器的气压与用于uwb定位的通用模块的气压差值实现z轴高度定位;所述通用模块通过倾角传感器实现当前传感器安装位置姿态识别。
[0045]
通用模块三维定位及安装姿态作为唯一识别码进行自适应组网编号;通用模块与通讯节点通过uwb通讯,通讯节点通过串行或无线通讯与现场监控平台连接,电脑或移动智能终端运行的监控软件根据组网编号将数据分配到图形界面显示,并可跟据坐标姿态数据对组立阶段识别并展示,对线缆受力状况及姿态进行监测和展示,可通过电脑或移动智能终端警告。
[0046]
如图3为本发明方法的流程示意图:本发明提供的这种面向铁塔组立传感器唯一识别码生成方法,包括通用模块的作为唯一识别码为[设备类型,设备位号]用于传感器数据与监控平台数据接口自动匹配;所述唯一识别码生成方式为在xy平面散点检索矩形并辅以z轴高度进行分类:以当前通用模块a坐标(xa,ya,za),与所有通用模块(xi,yi,zi)映射到xy平面构成线段,以模糊集合理论检索矩形。具体为包括如下步骤:
[0047]
s1.通过所有线段坐标计算任意两条线段的斜率和长度的隶属度函数的隶属度值,包括斜率隶属度值μ1(ω1)和长度隶属度值μ2(ω2):
[0048][0049][0050]
其中,ω1表示第一直线li和第二直线lj的斜率反正切值差的绝对值;ω2表示第一直线li和第二直线lj的长度差值的绝对值;b表示角度差的阈值;c表示长度差的阈值。
[0051]
s2.判断线段是否在同一平面,计算平面隶属度值μ3(ω3):
[0052][0053]
其中,ω3表示第一直线li和第二直线lj的中点高度差;h表示高度阈值。
[0054]
s3.寻找一对平行边,融合计算斜率隶属度值μ1(ω1)、长度隶属度值μ2(ω2)和平面隶属度值μ3(ω3)的平行边判定值s1:
[0055]
s1=[μ
1-(1-μ1)]+[μ
2-(1-μ2)]+[μ
3-(1-μ3)]
[0056]
其中,若平行边判定值s1>0,d>0,则第一直线li和第二直线lj为一对平行边,其中d为第一直线li和第二直线lj的中点距离。
[0057]
s4.求取任意两条线段角度差的绝对值,角度差隶属度值μ4(ω4)为:
[0058][0059]
其中,ω4表示第一直线li和第二直线lj的角度差的绝对值。
[0060]
s5.判断矩形的中心位置重合,计算中心位置隶属度值μ5(ω5):
[0061][0062]
其中,m表示中心点距离矩形长的阈值,n表示中心点距离矩形宽的阈值,n>m,ω5表示两对平行线对的对角线交点之间距离。
[0063]
s6.融合计算斜率隶属度值μ1(ω1)、长度隶属度值μ2(ω2)、平面隶属度值μ3(ω3)、角度差隶属度值μ4(ω4)和中心位置隶属度值μ5(ω5),获得融合隶属度值s:
[0064][0065]
其中,ω1表示第一直线li和第二直线lj的斜率反正切值差的绝对值;ω2表示第一直线li和第二直线lj的长度差值的绝对值;ω3表示第一直线li和第二直线lj的中点高度差;ω4表示第一直线li和第二直线lj的角度差的绝对值;ω5表示两对平行线对的对角线交点之间距离;若s》0,则4条线段可以组合成矩形。当s≤0时,4条线段无法组合成矩形;以距原点定位模块最近的通用模块为起始依次确定四个通用模块位号,再依据z轴高度分类传感器类型;抱杆倾斜角度用通用模块唯一识别码由|za-zi|趋近于设定抱杆高度确定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1