一种智能停车辅助及位置检测的综合停车引导系统的制作方法
本发明是一种智能停车辅助及位置检测的综合停车引导系统,应用于各类垂直升降类、平面移动类、巷道堆垛类停车设备。
背景技术:
1、传统的智能机械手搬运仓储式机械停车设备通常都配制有一个或多个出入口,因立体车库要求司机停放车辆位置准确,要求比较严格,对一些司机来说是一件困难的事情。因此,需要有一套自动测量车辆位置及车轮位置的综合性系统来解决司机停车难的方案。
技术实现思路
1、本发明要解决的问题是现有技术存在的上述问题,旨在提供一种新型的智能停车辅助及位置检测的综合停车引导系统。
2、本发明采用技术方案如下:
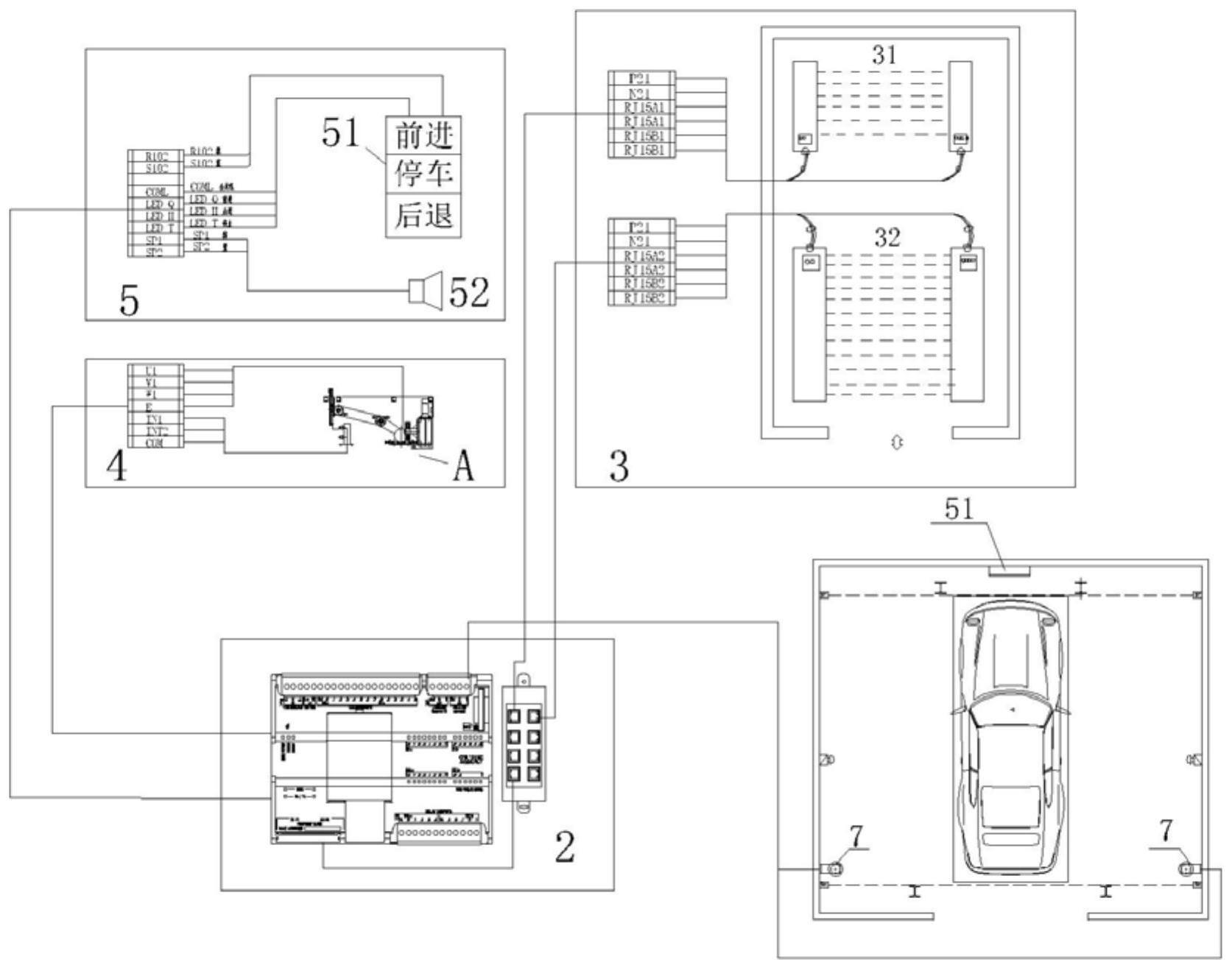
3、一种智能停车辅助及位置检测的综合停车引导系统,包括停车设备,所述停车设备的入口处设有车库控制器,以及与其控制连接的位置检测装置、阻车装置、引导显示及语音提示装置和汽车搬运器,其中,
4、引导显示及语音提示装置,用于通过显示及语音方式提示司机进行停车操作;
5、阻车装置,用于停止车辆,确定车辆的停放位置;
6、位置检测装置,用于获取车辆的前轮位置、后轮位置、车辆轴距信息进行采样处理,并将采集到的信息发送到车库控制器;
7、汽车搬运器,接收到车库控制器测得的车辆信息后,将位置及轴距调整到相应的位置。
8、作为优选,还包括与车库控制器连接的活体检测装置,用于判断车库内有无人员。
9、作为优选,所述的引导显示及语音提示装置包括显示器及扬声器,通过显示及语音提示司机进行停车操作。
10、作为优选,所述的阻车装置有两组分别设于入口处升降机的左前和右前位置。
11、作为优选,所述的位置检测装置有两组分别设于入口处车辆的前轮位置和后轮位置,分别为前轮位置检测光栅和后轮位置检测光栅。
12、作为优选,所述的汽车搬运器有两组分别对应于车辆前轮和后轮,两组搬运器之间设有轮轴距调节装置。
13、作为优选,所述的汽车搬运器包括行走机构和夹取机构,行走机构驱动搬运器平移搬运车辆,夹取机构用于夹取并抬升车辆。
14、作为优选,所述的前轮位置检测光栅由32个光束组成,后轮位置检测光栅由72个光束组成,每个光束的间距为25mm,通过轮胎遮挡光束的数量及相对位置输出相应的信息。
15、作为优选,两组阻车装置通过驱动马达同时驱动,实现同步动作。
16、作为优选,所述的活体检测装置为红外光束扫描装置,该装置有两组分别位于入口处停车位的顶部两侧,且对称设置。
17、与现有技术相比,本发明的有益效果是:
18、本产品是为了克服司机在立体停车库中停车难而提供一套有效的智能停车引导系统,该系统通过引导显示及语音提示引导司机停车,对车辆停放位置,车辆的轴径,车辆的轮径进行自动检测分析并确认,同时通过活体检测判断停车区域内是否有人员滞留,解决司机停车难问题。
技术特征:
1.一种智能停车辅助及位置检测的综合停车引导系统,包括停车设备,其特征在于:所述停车设备的入口处设有车库控制器,以及与其控制连接的位置检测装置、阻车装置、引导显示及语音提示装置和汽车搬运器,其中,
2.根据权利要求1所述的智能停车辅助及位置检测的综合停车引导系统,其特征在于:所述的阻车装置有两组分别设于入口处升降机的左前和右前位置。
3.根据权利要求1所述的智能停车辅助及位置检测的综合停车引导系统,其特征在于:所述的位置检测装置有两组。
4.根据权利要求3所述的智能停车辅助及位置检测的综合停车引导系统,其特征在于:所述的前轮位置检测光栅由多个光束组成,每个光束的间距为25mm息。
5.根据权利要求1所述的智能停车辅助及位置检测的综合停车引导系统,其特征在于:所述的汽车搬运器有两组,两组搬运器之间设有轮轴距调节装置。
6.根据权利要求5所述的智能停车辅助及位置检测的综合停车引导系统,其特征在于:所述的汽车搬运器包括行走机构和夹取机构,行走机构驱动搬运器平移搬运车辆,夹取机构用于夹取并抬升车辆。
7.根据权利要求4所述的智能停车辅助及位置检测的综合停车引导系统,其特征在于:两组阻车装置通过驱动马达同时驱动,实现同步动作。
技术总结
本发明是一种智能停车辅助及位置检测的综合停车引导系统,应用于各类停车设备。该系统,包括停车设备,所述停车设备的入口处设有车库控制器,以及与其控制连接的位置检测装置、阻车装置、引导显示及语音提示装置和汽车搬运器。本产品是为了克服司机在立体停车库中停车难而提供一套有效的智能停车引导系统,该系统通过引导显示及语音提示引导司机停车,对车辆停放位置,车辆的轴径,车辆的轮径进行自动检测分析并确认,同时通过活体检测判断停车区域内是否有人员滞留,解决司机停车难问题。
技术研发人员:周栋雄,郑水龙,王家洪,吴艳争
受保护的技术使用者:杭州大中泊奥科技股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!