上装驱动装置及其组装方法和搅拌车与流程
1.本发明涉及搅拌车领域,尤其涉及一种上装驱动装置及其组装方法和搅拌车。
背景技术:
2.搅拌车,指的是混凝土搅拌车,是用来运输建筑用混凝土的专用卡车,这类卡车上通常设置搅拌罐,在运输及工地现场等,搅拌罐需要采用低速大扭矩来对混凝土持续搅拌,以避免混凝土凝固。
3.传统的搅拌罐是由液压进行驱动,而液压驱动的方式不仅驱动效率较低,而且需要发动机持续提供动力。因此即便搅拌车停止行驶后也需要持续开启发动机为液压系统提供动力。
4.使用电机代替液压系统对搅拌罐进行驱动是主流方向,但是由于搅拌罐质量大,需要很大的驱动力。为解决该问题现有技术中一种方案是选用高变速比减速箱,单高变速比减速箱成本高,维护难度大。另一种是选用大扭矩电机,但大扭矩电机重量重,需要设置附加支撑结构对电机进行支撑,同样会增加制造成本,否则电机与支撑架安装面间容易断裂。
技术实现要素:
5.为了解决上述问题,本发明提供了一种低成本、结构稳定的上装驱动装置及其组装方法和搅拌车,同时在设计过程中电机型号的变换对支撑架负载更小,扩大了现有设计空间。
6.依据本发明的一个目的,本发明提供了一种上装驱动装置,包括:
7.支撑架,所述支撑架具有支撑面;
8.电机,所述电机包括定子和转子,所述定子和所述转子相平行,并在两者之间形成气隙面,所述电机以所述气隙面和所述支撑面大致平行的方式连接于所述支撑面上;
9.搅拌罐,所述搅拌罐连接于所述支撑架远离所述支撑面的一侧,并由所述电机驱动以围绕旋转轴线转动。
10.作为优选的实施例,所述气隙面与所述旋转轴线大致垂直。
11.作为优选的实施例,所述气隙面和水平面大致垂直。
12.作为优选的实施例,所述旋转轴线和水平面大致平行。
13.作为优选的实施例,所述搅拌罐、所述电机和所述旋转轴线同轴设置。
14.作为优选的实施例,所述定子位于所述转子和所述支撑面之间,且固定于所述支撑面上,所述转子和搅拌罐相连接。
15.作为优选的实施例,所述支撑架包括:
16.支脚;
17.壳体,所述壳体包括支撑面、连接面,以及延伸连接于所述支撑面和所述连接面之间的外侧面,所述外侧面连接于所述支脚上,所述搅拌罐连接于所述连接面上。
18.作为优选的实施例,所述电机为盘式电机。
19.依据本发明的另一目的,本发明还提供了一种上装驱动装置的组装方法,包括以下步骤:
20.(a)提供一电机,所述电机包括定子和转子,所述定子和所述转子相平行,以在两者之间形成气隙面;
21.(b)将所述电机以所述气隙面和所述支撑面大致平行的方式连接于支撑架的支撑面上,并与搅拌罐传动连接。
22.作为优选的实施例,所述电机带动所述搅拌罐围绕旋转轴线转动,所述气隙面和所述旋转轴线大致垂直;
23.和/或,所述气隙面和水平面大致垂直。
24.依据本发明的另一目的,本发明还提供了一种搅拌车,包括上述实施例的上装驱动装置,还包括水平布置的底盘,所述支撑架固定于所述底盘上。
25.与现有技术相比,本技术方案具有以下优点:
26.所述气隙面和所述支撑面大致平行,所述气隙面和水平面大致垂直,并且所述气隙面和所述旋转轴线大致垂直,缩小所述盘式电机的重心至所述支撑架之间的距离,使得电机弯矩更小,有效提高电机安装稳定性,降低支撑架负载。另外,由于气隙面和水平面大致垂直,因此在设计过程中电机型号的变换(例如增大气隙面)对支撑架的负载更小,电机的气隙面和体积仅在竖直方向上调整变换,无需更改或增设支撑架,不仅有利于扩大设计空间,还保证电机安装的稳定性。
27.以下结合附图及实施例进一步说明本发明。
附图说明
28.图1为现有搅拌车的一实施例的上装驱动装置的结构示意图;
29.图2为图1上装驱动装置的受力原理图;
30.图3为现有搅拌车的另一实施例的上装驱动装置的结构示意图;
31.图4为图3上装驱动装置的受力原理图;
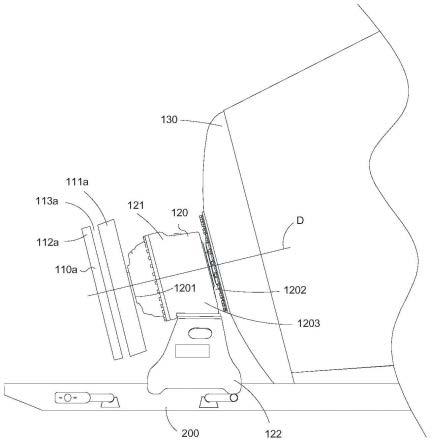
32.图5为本发明所述上装驱动装置第一实施例的结构示意图;
33.图6为图5上装驱动装置的受力原理图;
34.图7为本发明所述上装驱动装置第二实施例的结构示意图;
35.图8为图7上装驱动装置的受力原理图。
具体实施方式
36.以下描述用于揭露本发明以使本领域技术人员能够实现本发明。以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。在以下描述中界定的本发明的基本原理可以应用于其他实施方案、变形方案、改进方案、等同方案以及没有背离本发明的精神和范围的其他技术方案。
37.如图5至图8所示,所述上装驱动装置100,包括:
38.支撑架120,所述支撑架120具有支撑面1201;
39.电机110a、110b,所述电机110a、110b包括定子111a、111b和转子112a、112b,所述
定子111a、111b和所述转子112a、112b相平行,并在两者之间形成气隙面113a、113b,所述电机110a、110b以所述气隙面113a、113b和所述支撑面1201大致平行的方式连接于所述支撑面1201上;
40.搅拌罐130,所述搅拌罐130连接于所述支撑架120远离所述支撑面1201的一侧,并由所述盘式电机110a、110b驱动以围绕旋转轴线d转动。
41.由于所述电机110a、110b以所述气隙面113a、113b和所述支撑面1201大致平行的方式连接于所述支撑面1201上,因此能够拉近所述电机110a、110b的重心至所述支撑架120的距离,并且力臂更小,使得产生的弯矩更小,提高了电机安装稳定和可靠性,避免所述支撑架120无法承受电机自重而发生破裂等现象。并且在增大气隙面来增大电机扭矩的设计过程中,力臂始终保持较小的范围,对所述支撑架120负载更小,扩大设计空间。
42.相对于现有技术采用高变速比减速箱来说,避免因使用高变速比减速箱而造成成本高,维护难度大等缺陷。而本技术能够直接将所述电机110a、110b支撑于所述支撑面1201上,不仅结构简单,组装方便,而且结构稳定。
43.相对于现有技术采用大扭矩电机来说,本技术影响扭矩大小的气隙面113a、113b,其靠近且平行所述支撑面1201设置,因此所述气隙面113a、113b大小无论如何变化,所述电机110a、110b均能稳定地支撑于所述支撑面1201上,因而无需增设附加支撑结构,有效降低成本。
44.需要说明的是,本实施例的“大致”指的是接近或者完全一致。以所述气隙面113a、113b和所述支撑面1201大致平行为例,其中所述气隙面113a、113b和所述支撑面1201完全平行,或者所述气隙面113a、113b和所述支撑面1201接近平行。本文所述接近平行指的是两者之间的夹角小于30
°
等,即可忽略不计。
45.所述盘式电机满足所述电机110a、110b的结构,本实施例提供了两种不同气隙面长度的盘式电机(即第一盘式电机110a和第二盘式电机110b),来分别介绍其在所述支撑面1201上的安装方式,具体如下:
46.图5和图6示出了本发明所述上装驱动装置第一实施例的结构示意图,其采用了第一盘式电机110a,所述第一盘式电机110a包括第一定子111a和第一转子112a,所述第一定子111a和所述第一转子112a相平行,并在两者之间形成第一气隙面113a,所述第一盘式电机110a以所述第一气隙面113a和所述支撑面1201大致平行的方式连接于所述支撑面1201上。
47.所述第一定子111a位于所述第一转子112a和所述支撑面1201之间,所述第一定子111a可固定于所述支撑架120上,即所述第一定子111a和所述支撑架120保持固定,而所述第一转子112a相对所述第一定子111a转动,并且所述第一转子112a和所述搅拌罐130连接,以带动所述搅拌罐130转动,例如所述第一转子112a连接一转轴,所述转轴穿设所述第一定子111a,来与所述搅拌罐130连接,以使所述第一转子112a带动所述搅拌罐130绕着所述转轴轴线转动,可见所述转轴和所述旋转轴线d同轴设置。另外在电机结构中,定子的质量比转子的质量更重,而本实施例采用了将所述第一定子111a布置于所述第一转子112a和所述支撑面1201之间,使得第一盘式电机110a的重心弯矩更小。具体地,所述转轴的轴线可位于所述第一定子111a和所述第一转子112a的中心上,可见所述转轴、所述第一定子111a和所述第一转子112a同轴设置,即所述第一盘式电机110a和所述旋转轴线d同轴设置。当然所述
搅拌罐130也可和所述旋转轴线d同轴设置,以使所述第一盘式电机110a带动所述搅拌罐130自转而搅拌混凝土。所述支撑架120内部可设置减速器等,所述减速器分别连接所述转轴和所述搅拌罐130。
48.所述电机弯矩可采用以下公式计算:m=f
×
l。
49.其中,m指的是电机弯矩;f指的是电机重心受力,电机重心受力跟电机重量有关;l指的是力臂,力臂指的是电机重心至所述支撑面1201上弯点的距离。根据上述计算公式,计算得到:
50.所述第一盘式电机110a的弯矩m=f1
×
l1,参考图6;
51.所述第三电机110c的弯矩m=f3
×
l3,参考图2;
52.所述第四电机110d的弯矩m=f4
×
l4,参考图4。
53.其中,l4>l3>l1,f4>f3≥f1,可见所述第四电机110d的弯矩最大,而在相同电机重量下,第三电机110c的弯矩明显大于所述第一盘式电机110a的弯矩。可见第一盘式电机110a重心至所述支撑架120之间的距离较小,即力臂l1小,避免所述支撑架120无法承受电机自重所带来的弯矩和剪力,而出现破损现象,进而保证电机安装的稳定和可靠性。
54.进一步说明,图1和图2示出的现有搅拌车的一实施例的上装驱动装置,其固定于水平设置的底盘200上,上装驱动装置100包括第三电机110c、支撑架120和搅拌罐130,支撑架120固定底盘200上,第三电机110c固定于支撑架120的支撑面1201上,且与搅拌罐130传动连接,以使第三电机110c带动搅拌罐130转动,来对搅拌罐130内的混凝土进行搅拌。其中第三电机110c包括第三转子112c和第三定子111c,目前第三电机110c的第三定子111c套设于第三转子112c外部,以在两者之间形成第三气隙面113c,此时第三气隙面113c和第三电机110c轴向相平行,且与支撑架120上的支撑面1201相垂直,由于第三电机110c和搅拌罐130整体相对底盘200倾斜设置,因此第三气隙面113c和水平面大致平行,参考图2,此时第三电机110c的重心沿第三气隙面113c方向延伸,并远离支撑面1201设置,使得力臂l3较长,增大了电机弯矩。此时支撑架120无法承受第三电机110c自重所带来的弯矩和剪力,容易发生破裂等现象。
55.图3和图4示出的现有搅拌车的另一实施例的上装驱动装置,其采用第四电机110d,所述第四电机110d包括第四转子112d和第四定子111d,所述第四定子111d套设在第四转子112d,以在两者之间形成第四气隙面113d。所述第四电机110d同样以所述第四气隙面113d垂直于所述支撑面1201的方式布置于所述支撑架120上,虽然电机扭矩因所述第四气隙面113d变长而增大,但是第四电机110d的重心至支撑架更远,力臂l4更长,参考图4,使得电机弯矩大幅度提升,以及支撑架负载更大,进而进一步降低电机稳定和可靠能力。
56.而本实施例的所述第一盘式电机110a以所述气隙面113a和所述支撑面1201大致平行的方式连接于所述支撑面1201上,因此能够拉近所述第一盘式电机110a的重心至所述支撑架120的距离,并且力臂更小,使得产生的弯矩更小,提高了电机安装稳定和可靠性,避免所述支撑架120无法承受电机自重而发生破裂等现象。
57.参考图6,所述第一盘式电机110a为扁平形状,即所述第一盘式电机110a的轴向尺寸小,可见所述第一定子111a和所述第一转子112a的轴向尺寸也小。由于所述第一盘式电机110a的重心至所述支撑面1201的距离,仅间隔了一所述第一定子111a,而由于所述第一定子111a的轴向尺寸较小,因此所述第一盘式电机110a的力臂较小。并且所述第一气隙面
113a和所述支撑面1201大致平行,以使所述第一气隙面113a能够贴合所述支撑架120,以进一步缩短所述第一盘式电机110a的重心至所述支撑架120之间的距离,使得第一盘式电机110a的重心弯矩进一步减小。
58.如图5和图6所示,所述第一盘式电机110a、所述支撑架120和所述搅拌罐130从左至右布置,所述第一盘式电机110a的重心,所述搅拌罐130和所述支撑架120的中心可分别位于所述旋转轴线d上,其中所述第一盘式电机110a的重心位于所述第一定子111a和所述第一转子112a之间。以使所述搅拌罐130、所述盘式电机110a、110b和所述旋转轴线d同轴设置。
59.参考图6,所述旋转轴线d和水平面大致平行,即两者之间的夹角较小。当所述旋转轴线d和所述水平面之间存在一定角度时,所述旋转轴线d以左低右高的方式相对所述水平面倾斜设置。
60.继续参考图6,由于所述第一定子111a和所述第一转子112a分别与所述旋转轴线d相垂直,可见位于所述第一定子111a和所述第一转子112a之间的第一气隙面113a,其与所述旋转轴线d大致垂直。
61.另外由于所述第一气隙面113a和所述支撑面1201大致平行,因此所述第一气隙面113a和水平面大致垂直。
62.由上述可知,所述第一气隙面113a和水平面大致平行,所述第一气隙面113a和所述旋转轴线d大致垂直,以及所述第一气隙面113a和水平面大致垂直,能够缩小所述第一盘式电机110a的重心至所述支撑架120之间的距离,使得电机弯矩更小,有效提高电机安装稳定性,降低支撑架120负载。
63.如图5所示,所述支撑架120包括:
64.支脚122;
65.壳体121,所述壳体121包括支撑面1201、连接面1202,以及延伸连接于所述支撑面1201和所述连接面1202之间的外侧面1203,所述外侧面1203连接于所述支脚122上,所述搅拌罐130连接于所述连接面1202上。
66.所述壳体121通过所述支脚122固定于所述水平布置的底盘200上,其中所述支撑面1201和连接面1202大致与水平面垂直设置,此时所述支撑面1201、所述连接面1202和所述第一气隙面113a大致平行设置,以使所述第一盘式电机110a、所述支撑架120和所述搅拌罐130更加紧凑贴合。
67.图7和图8示出了本发明所述上装驱动装置第二实施例的结构示意图,其采用了扭矩大于第一盘式电机110a的第二盘式电机110b,所述第二盘式电机110b包括第二定子111b和第二转子112b,所述第二定子111b和所述第二转子112b相平行,并在两者之间形成第二气隙面113b,所述第二盘式电机110b以所述第二气隙面113b和所述支撑面1201大致平行的方式连接于所述支撑面1201上,所述第二气隙面113b和所述旋转轴线d大致垂直,以及所述第二气隙面113b和水平面大致垂直。
68.第二实施例的上装驱动装置与第一实施例不同在于,所述第二气隙面113b大于所述第一气隙面113a,由于所述第二气隙面113b和水平面大致垂直,因此所述第二气隙面113b仅在竖直方向延伸,可见所述第二盘式电机110b的体积也沿竖直方向延伸,而第二盘式电机110b的重心在水平方向上移动较小,并且力臂l2保持于力臂l1近似,参考图6和图8。
69.进一步说明,根据弯矩的计算公式,计算得到:所述第二盘式电机110b的弯矩m=f2
×
l2,参考图8。
70.由于所述第二气隙面113b和水平面大致垂直,因此所述第二气隙面113b和所述第二盘式电机110b的体积,仅在竖直方向延伸,相对于第一盘式电机110a来说,两者的力臂保持较小的范围改变,因此可扩大设计空间。
71.而在现有电机重新设计过程中,即将所述第三电机110c重新设计为气隙面更大的所述第四电机110d时,参考图1至图4,虽然电机扭矩因所述第四气隙面113d变长而增大,但是第四电机110d的重心至支撑架更远,力臂l4更长,参考图4,使得电机弯矩大幅度提升,以及支撑架负载更大,进而进一步降低电机稳定和可靠能力。可见目前电机弯矩较大,难以被支撑架所支撑,影响电机的安装稳定性。并且在电机扭矩变换的设计过程中,对支撑架负载较大,并且限制了设计空间。
72.综上所述,现有技术的气隙面增大设计中,电机和气隙面的尺寸是沿着水平方向延伸的,这样增加了电机重心至所述支撑架120之间的距离,可见现有技术的气隙面调整设计中,力臂的调整范围较大,限制了设计空间。而本实施例采用了所述第二气隙面113b和所述支撑面1201大致平行的方式,使得无论气隙面如何变化,其力臂的变化始终保持较小的范围。另外现有技术中一旦沿水平方向延伸电机和气隙面,则还需增加固定结构来支撑电机,而本实施例的电机和气隙面始终贴合支撑架,则无需另设结构来固定,降低成本,并能保证电机安装稳定性,还可扩大设计空间。
73.如图5至图8所示,本发明还提供了一种上装驱动装置100的组装方法,包括以下步骤:
74.(a)提供一电机110a、110b,所述电机110a、110b包括定子111a、111b和转子112a、112b,所述定子111a、111b和所述转子112a、112b相平行,以在两者之间形成气隙面113a、113b;
75.(b)将所述电机110a、110b以所述气隙面113a、113b和所述支撑面1201大致平行的方式连接于支撑架120的支撑面1201上,并与搅拌罐130传动连接,以带动所述搅拌罐130围绕旋转轴线d转动。
76.所述气隙面113a、113b和所述支撑面1201大致平行,所述气隙面113a、113b和水平面大致垂直,并且所述气隙面113a、113b和所述旋转轴线d大致垂直,缩小所述电机110a、110b的重心至所述支撑架120之间的距离,使得电机弯矩更小,有效提高电机安装稳定性,降低支撑架120负载。另外,由于气隙面113a、113b和水平面大致垂直,因此在设计过程中电机型号的变换(例如增大气隙面)对支撑架120的负载更小,电机的气隙面和体积仅在竖直方向上调整变换,无需更改或增设支撑架,不仅有利于扩大设计空间,还保证电机安装的稳定性。
77.所述盘式电机满足所述电机110a、110b的结构,具体内容可参考所述上装驱动装置100中的描述,在此不作赘述。
78.如图5至图8所示,本发明还提供了一种搅拌车,包括上述实施例的上装驱动装置100,所述搅拌车还包括水平布置的底盘200,所述支撑架120固定于所述底盘200上。
79.由于所述搅拌车采用了所述上装驱动装置100,因此所述搅拌车的有益效果可参考上述实施例的所述上装驱动装置100。
80.以上所述的实施例仅用于说明本发明的技术思想及特点,其目的在于使本领域内的技术人员能够了解本发明的内容并据以实施,不能仅以本实施例来限定本发明的专利采用范围,即凡依本发明所揭示的精神所作的同等变化或修饰,仍落在本发明的专利范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1