一种自动化接料的真空练泥机的制作方法
1.本发明涉及耐火材料生产技术领域,具体为一种自动化接料的真空练泥机。
背景技术:
2.随着耐火材料工业的快速发展,我国耐火材料经过多年的发展已基本形成了科研设计生产应用的产业体系,为我国工业的发展起到了重要的作用,现如今的真空练泥机发展非常迅速,出现了很多种类的练泥机,但是发明人发现现今的真空练泥机需要人工接料,存在生产效率低的问题,还需要人工拿长刀割料,存在一定的安全隐患。
技术实现要素:
3.本发明的目的是针对现有技术的不足之处,通过设置支撑单元支撑管坯,并在转动机构的带动下做回转运动,在运动过程中通过导轨a和导轨b使夹持组件对管坯夹持固定,继续运动过程中切割刀片通过导轨c做上升运动,对管坯进行切割,克服了人工切割管坯存在的安全隐患,提高了安全性。
4.针对上述技术问题,本发明采用的技术方案如下:
5.一种自动化接料的真空练泥机,包括支撑架a和支撑架b,还包括传输装置,所述传输装置设置在支撑架a和支撑架b之间,该传输装置包括若干个支撑管坯的支撑单元以及带动支撑单元做回转运动的转动机构;
6.切割装置,所述切割装置设置在两个支撑单元之间,且和设置在转动机构上对支撑单元的数量相同,该切割装置包括切割刀片、支撑切割刀片的支撑件a以及切割过程中夹持管坯的夹持组件;
7.还包括接料装置,所述接料装置设置在传输装置之后。
8.作为一种优选,所述支撑单元包括支撑件b和固定在支撑件b上的支撑组件,支撑件b的一端设置有辊轮a,另一端连接在转动机构上。
9.作为一种优选,所述夹持组件包括滑动设置在支撑件a上的夹持件以及起导向作用的导向杆a,夹持件上开设有用于切割刀片通过的弧形槽。
10.作为一种优选,所述支撑件a上开设有放置切割刀片的方形槽,切割刀片底部与支撑件a之间连接有弹簧a,支撑件a与夹持组件之间连接有弹簧b,所述支撑件a的一端设置有辊轮b,另一端连接在转动机构上。
11.作为一种优选,所述接料装置包括传送机构以及固定在传送机构的电机a,传送机构包括传送带、传送带滚轴以及支撑腿。
12.作为一种优选,其特征在于,所述转动机构包括固定在支撑架a上的电机b、在电机b带动下的齿轮a、固定在支撑架a上的齿轮b、连接齿轮a和齿轮b的链条以及固定在支撑架b上的导向架,所述导向架上开设有供辊轮a和辊轮b滚动的导向限位槽a。
13.作为一种优选,其特征在于,所述支撑组件包括一端固定设置在支撑件b上的支撑板a以及上下滑动设置在支撑板a内的支撑板b和支撑板c,所述支撑板b和支撑板c底部分别
设置有导向杆b和导向杆c,所述支撑板a开设有供导向杆b和导向杆c上下滑动的槽孔,且其上端部内侧设置有防止支撑板b和支撑板c转动到转动机构底部时滑落的弹性垫块。
14.作为一种优选,所述支撑架a和导向架上分别设置有用于使夹持组件夹持管坯的导轨a和导轨b。
15.作为又一种优选,所述支撑架a上设置有顶升切割刀片的导轨c,所述支撑架a上设置有顶升支撑板b和支撑板c的导轨d,且导轨c和导轨d后端会相交,此段导轨为导轨e。
16.本发明的有益效果:
17.1.本发明中通过设置支撑单元对从真空练泥机中挤出的管坯进行支撑,在回转运动过程中,切割机构对管坯进行切割,解决了人工扶持并对管坯进行切割存在的安全隐患,提高了安全性。
18.2.本发明中通过设置夹持组件夹持管坯,再通过切割装置对管坯进行切割,维持了管坯切割处的形状,成形好。
19.3.本发明中通过设置若干个支撑单元和若干个切割装置,可以对管坯持续不断地传输,并切割出若干个管坯,再通过接料装置对成形的管坯进行运输,提高了生产效率。
20.4.本发明中通过将支撑板a一端固定设置在支撑件b上,解决了支撑板a在回转到真空练泥机出料口时会撞到管坯的问题。
21.5.本发明中通过在切割刀片与支撑件a之间设置弹簧a、在夹持组件与支撑件a之间设置弹簧b及支撑板a上端部设置弹性垫块是为了防止回转过程中转至传输机构下方时滑落。
22.综上所述,该设备具有安全性高,生产效率高,切割后的管坯成形好等优点,尤其适用于耐火材料生产技术领域。
附图说明
23.为了更清楚的说明本发明实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述的附图仅仅是本发明的一些实施例,对于本领域的普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他附图。
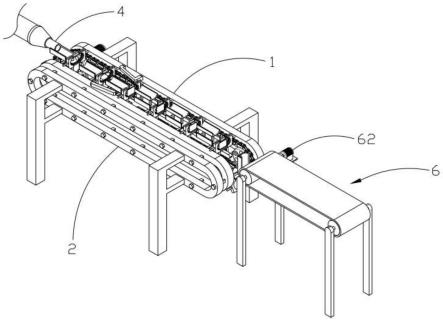
24.图1为自动化接料的真空练泥机的结构示意图;
25.图2为自动化接料的真空练泥机运作的结构示意图;
26.图3为泥管送至接料装置的结构示意图;
27.图4为传输装置、切割装置及导向架的结构示意图;
28.图5为转动机构、支撑单元及切割装置的结构示意图;
29.图6为图5a处放大结构示意图;
30.图7为图5b处放大结构示意图;
31.图8为支撑板a的结构示意图;
32.图9为切割装置的结构示意图;
33.图10为切割装置的剖切示意图;
34.图11为导向架的结构示意图;
35.图12为支撑架a的结构示意图;
36.图13为泥管送至接料装置支撑板b和支撑板c位置的结构示意图;
37.图14为刀片、支撑板b及支撑板c在导轨c和导轨d上的结构示意图。
具体实施方式
38.下面结合附图对本发明实施例中的技术方案进行清楚、完整地说明。
39.实施例一
40.如图1至图14所示,一种自动化接料的真空练泥机,包括支撑架a1和支撑架b2,还包括传输装置3,所述传输装置3设置在支撑架a1和支撑架b2之间,该传输装置3包括若干个支撑管坯4的支撑单元31以及带动支撑单元31做回转运动的转动机构32;
41.切割装置5,所述切割装置5设置在两个支撑单元31之间,且和设置在转动机构32上支撑单元31的数量相同,该切割装置5包括切割刀片51、支撑切割刀片51的支撑件a52以及切割过程中夹持管坯4的夹持组件53;
42.在此值得一提的是,通过设置若干个支撑单元31和若干个切割装置5,可以对管坯4持续不断地传输,并切割出若干个管坯4,再通过接料装置6对成形的管坯4进行运输,提高了生产效率。
43.还包括接料装置6,所述接料装置6设置在传输装置3之后。
44.如图6所示,支撑单元31包括支撑件b311和固定在支撑件b311上的支撑组件312,支撑件b311的一端设置有辊轮a313,另一端连接在转动机构32上。
45.如图8所示,夹持组件53包括滑动设置在支撑件a52上的夹持件531以及起导向作用的导向杆a532,夹持件531上开设有用于切割刀片51通过的弧形槽533。
46.在此值得一提的是,设置夹持组件531夹持管坯4,再通过切割装置5对管坯4进行切割,维持了管坯4切割处的形状,成形好。
47.如图9、10所示,支撑件a52上开设有放置切割刀片51的方形槽521,切割刀片51底部与支撑件a52之间连接有弹簧a522,支撑件a52与夹持组件53之间连接有弹簧b523,所述支撑件a52的一端设置有辊轮b524,另一端连接在转动机构32上。
48.本实例中,弹簧a522的作用是为了使切割刀片51固定在支撑件a52上,在回转过程中不会掉落,弹簧b523的作用是为了使夹持组件53在完成夹持之后可以复原。
49.所述接料装置6包括传送机构61以及固定在传送机构61的电机a62,传送机构61包括传送带611、传送带滚轴612以及支撑腿613。
50.如图5和11所示,转动机构32包括固定在支撑架a1上的电机b321、在电机b321带动下的齿轮a322、固定在支撑架a1上的齿轮b323、连接齿轮a322和齿轮b323的链条324以及固定在支撑架b2上的导向架325,所述导向架325上开设有供辊轮a313和辊轮b524滚动的导向限位槽a3251。
51.如图6、8所示,支撑组件312包括一端固定设置在支撑件b311上的支撑板a3121以及上下滑动设置在支撑板a3121内的支撑板b3122和支撑板c3123,所述支撑板b3122和支撑板c3123底部分别设置有导向杆b3124和导向杆c3125,所述支撑板a3121开设有供导向杆b3124和导向杆c3125上下滑动的槽孔3216,且其上端部内侧设置有防止支撑板b3122和支撑板c3123转动到转动机构32底部时滑落的弹性垫块3217。
52.本实例中,通过设置弹性垫块3217保证支撑板b3122和支撑板c3123在回转过程中
不会滑落。
53.所述支撑架a1和导向架325上分别设置有用于使夹持组件53夹持管坯4的导轨a12和导轨b3252。
54.所述支撑架a1上设置有顶升切割刀片51的导轨c13,所述支撑架a1上设置有顶升支撑板b3122和支撑板c3123的导轨d14,且导轨c13和导轨d14后端会相交,此段导轨为导轨e15。
55.工作过程如下:
56.管坯4从真空练泥机中挤出到支撑单元31上,电机b321带动齿轮a322做旋转运动,进而齿轮a322带动链条324做回转运动,支撑单元31在链条324的带动下做回转运动,运动过程中夹持组件53在导轨a12和导轨b3252作用下对管坯4进行夹持,继续运动过程中切割装置5中的切割刀片51在导轨c13的作用下进行上升运动,实现对管坯4的切割;
57.切割完后继续运动夹持组件53离开导轨a12和导轨b3252,在弹簧b523的作用下缩回到原位,支撑板b3122和支撑板c3123在导轨d14的作用下进行上升运动,将管坯4抬起高于夹持组件53;
58.支撑板b3122和支撑板c3123继续运动至导轨e15末端,此时切割刀片51已经滑出导轨e15,切割刀片51在弹簧a522的作用下缩回支撑件a52内,管,4已接触到接料装置6,并带动管坯4往传送带611上运动,支撑板c3123滑出导轨e15,支撑板c3123在重力作用下落回到支撑板a3121中,支撑板b3122继续支撑管坯4向传送带611上运动,直至滑出导轨e15,传送带611继续带动管坯4向前移动,直至末尾人工接料处。
59.在本发明的描述中,需要理解的是,术语“前后”、“左右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或部件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对发明的限制。
60.当然在本技术方案中,本领域的技术人员应当理解的是,术语“一”应理解为“至少一个”或“一个或多个”,即在一个实施例中,一个元件的数量可以为一个,而在另外的实施例中,该元件的数量可以为多个,术语“一”不能理解为对数量的限制。
61.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明的技术提示下可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求书的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1