一种屋面自动喷涂翻新机器人的制作方法
1.本发明涉及自动机械化技术领域,具体为一种屋面自动喷涂翻新机器人。
背景技术:
2.当前,房屋存量超350亿平方米,随着房屋年龄增加,屋顶颜色老化褪色影响美观,高层、超高层建筑的屋面的翻新通常使用吊篮式或安全网安全绳施工,工人施工时存在安全隐患,而新生代民工大都不愿从事此类工作,行业存在断层危机,另外施工困难,风险大,造价高昂,施工周期长,喷涂均匀度受人为影响等因素,发明一种屋面自动喷涂翻新机器人以解决上述问题迫在眉睫。
3.在实现本发明过程中,发明人发现现有技术中至少存在如下问题没有得到解决:
4.1、高层、超高层建筑的屋面的翻新通常使用吊篮式或安全网安全绳施工,人工作业存在安全隐患,工人施工困难,风险大,造价高昂,施工周期长,喷涂均匀度受人为影响等因素;
5.2、现有的喷涂机器人不具有自动避障功能,在使用过程中存在自动化程度一般,使用体验一般,不利于装置进行喷涂作业。
技术实现要素:
6.本发明的目的是为了解决现有技术中存在的缺点,如使用吊篮式或安全网安全绳施工,存在安全隐患,另外施工困难,风险大,造价高昂,施工周期长,喷涂均匀度受人为影响等因素,提出了一种屋面自动喷涂翻新机器人。
7.为实现上述目的,本发明提供如下技术方案:
8.一种屋面自动喷涂翻新机器人,包括车厢底座、主轴支架和主机组件,所述车厢底座内部的底部固定安装有驱动器,所述车厢底座的内部两侧固定安装有两组中低速无刷电机,所述车厢底座的两侧安装有两组皮带轮驱动组件,所述车厢底座的顶部固定安装有主轴支架,所述主轴支架的正面上方固定安装有伺服电机一,所述伺服电机一的输出端安装有角度调节转辊,所述主轴支架的正面下方固定安装有伺服电机二,所述伺服电机二的输出端安装有丝杆,所述丝杆的外部活动安装有螺纹滑套组件,且螺纹滑套组件的顶部通过套环活动套在角度调节转辊的外部,所述角度调节转辊的外部活动安装有调节臂,所述调节臂的一侧开设有限位滑孔,所述车厢底座的顶部一侧固定安装有储液箱,所述储液箱的一侧固定安装有高压喷涂泵,所述高压喷涂泵的输出端安装有高压喷涂软管,所述高压喷涂软管与防飞溅型喷嘴连接;
9.所述车厢底座的顶部另一侧固定安装有主机组件,所述主机组件包括电源箱、控制箱、远程遥控电脑、远程信号发射接收装置和可拆卸式锂电池,所述电源箱的一侧固定安装有控制箱,所述控制箱的内部一侧固定安装有远程遥控电脑,所述主机组件的内部一侧固定安装有远程信号发射接收装置,所述车厢底座的顶部后端一侧固定安装有安装杆一,所述车厢底座的顶部后端另一侧固定安装有安装杆二,所述车厢底座的顶部两侧固定安装
有两组侧边架,所述侧边架的顶部固定安装有限位栏,且限位栏的外部套有海绵套。
10.优选的,所述车厢底座的正面固定安装有检修门一,检修门一的正面两侧固定安装有两组距离感应器,且距离感应器通过导线与远程遥控电脑电性连接。
11.优选的,所述皮带轮驱动组件包括传动轮、限位轮、履带,所述传动轮的外部环绕安装有履带,所述传动轮之间等距安装有限位轮,且传动轮与中低速无刷电机的输出端传动连接。
12.优选的,所述调节臂的顶部一侧固定安装有倾角传感器,倾角传感器通过导线与远程遥控电脑电性连接,调节臂一端的顶部与底部固定安装有两组防飞溅型喷嘴,且防飞溅型喷嘴与高压喷涂软管的一端连接。
13.优选的,所述高压喷涂泵的输出端通过管道与储液箱连接,且储液箱的顶部安装有注液口。
14.优选的,所述电源箱的内部安装有可拆卸式锂电池,且可拆卸式锂电池与远程信号发射接收装置、远程遥控电脑、伺服电机一、伺服电机二、驱动器、中低速无刷电机电性连接。
15.优选的,所述安装杆一的顶部固定安装有光伏板,且光伏板通过导线与可拆卸式锂电池电性连接。
16.优选的,所述安装杆二的顶部固定安装有三维结构光成像摄像头,且三维结构光成像摄像头通过导线与远程遥控电脑电性连接。
17.与现有技术相比,本发明的有益效果是:
18.1、本发明在使用过程中,需要调节防飞溅型喷嘴的喷涂角度时,利用伺服电机一的通电运行可带动角度调节转辊旋转,在角度调节转辊与限位滑孔的作用下可使得调节臂围绕角度调节转辊旋转,从而调整防飞溅型喷嘴的喷涂角度,需要防飞溅型喷嘴往复喷涂时,利用角度调节转辊的正逆旋转可带动丝杆正逆旋转,丝杆旋转时会使螺纹滑套组件在丝杆的外部进行移动,通过螺纹滑套组件的移动可带动调节臂在角度调节转辊的外部平移,从而实现往复喷涂,以此实现装置左右或上下的移动,可实现斜屋面自动翻转,本发明屋面自动喷涂翻新机器人凭借自主研发的斜屋面自动翻转稳定系统,自动绕障碍系统,屋面自动识别系统,实现平稳自动喷涂作业,工作效率是人工的8-10倍,作业简便,无需围栏,天气因素影响小,仅需一人远程控制即可完成大面积作业,昼夜不歇,日喷涂面积1000平以上,有效解决传统人工效率低,风险高,质量不稳定等因素。
19.2、本发明通过远程信号发射接收装置能方便工作人员使用外置发射器进行远程操控,方便工作人员自由走动并选择最佳或安全的视觉位置实行操作,清除以往由于视线不清、线控束缚、环境恶劣或指挥配合不当等因素造成的事故隐患,既保证了安全操作又大幅度提高了生产效率。
20.3、本发明通过利用高速的三维结构光成像摄像头成像系统,能对屋面进行扫描,形成点云数据,利用远程遥控电脑对点云数据进行智能分析处理,加以ai算法、进行机器人路径自动规划、自动防碰撞等智能化技术,计算出当前屋面实时空间坐标,为引导机器人完成自动喷涂任务做好准备,实现自动绕障碍,自动化程度高。
附图说明
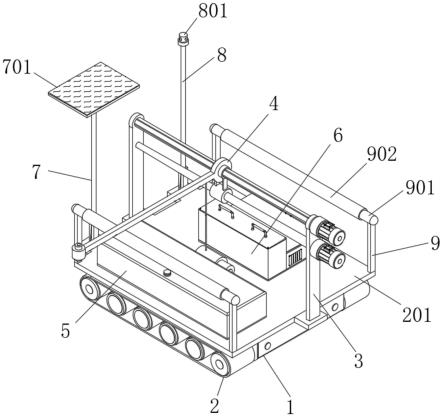
21.图1为本发明的主视图;
22.图2为本发明的内部结构示意图;
23.图3为本发明的正面结构示意图;
24.图4为本发明的主轴支架局部结构示意图;
25.图5为本发明的调节臂局部结构示意图;
26.图6为本发明的车厢底座、皮带轮驱动组件立体结构示意图;
27.图7为本发明的车厢底座、皮带轮驱动组内部结构示意图;
28.图8为本发明的电源箱、控制箱内部结构示意图。
29.图中:1、车厢底座;101、驱动器;102、中低速无刷电机;103、检修门一;104、距离感应器;2、皮带轮驱动组件;201、传动轮;202、限位轮;203、履带;3、主轴支架;301、伺服电机一;302、角度调节转辊;303、伺服电机二;304、丝杆;305、螺纹滑套组件;4、调节臂;401、倾角传感器;402、防飞溅型喷嘴;403、限位滑孔;5、储液箱;501、高压喷涂泵;502、高压喷涂软管;6、主机组件;601、电源箱;602、控制箱;603、远程遥控电脑;604、远程信号发射接收装置;605、可拆卸式锂电池;7、安装杆一;701、光伏板;8、安装杆二;801、三维结构光成像摄像头;9、侧边架;901、限位栏;902、海绵套。
具体实施方式
30.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
31.在本发明的描述中,需要说明的是,术语“上”、“下”、“内”、“外”“前端”、“后端”、“两端”、“一端”、“另一端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
32.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“设置有”、“连接”等,应做广义理解,例如“连接”,可以是固定连接,也可以是可拆卸连接,或一体的连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
33.实施例一
34.请参阅图1-8本发明提出的一种屋面自动喷涂翻新机器人,包括车厢底座1、主轴支架3和主机组件6,车厢底座1内部的底部固定安装有驱动器101,车厢底座1的内部两侧固定安装有两组中低速无刷电机102,车厢底座1的两侧安装有两组皮带轮驱动组件2,车厢底座1的顶部固定安装有主轴支架3,主轴支架3的正面上方固定安装有伺服电机一301,伺服电机一301的输出端安装有角度调节转辊302,主轴支架3的正面下方固定安装有伺服电机二303,伺服电机二303的输出端安装有丝杆304,丝杆304的外部活动安装有螺纹滑套组件
305,且螺纹滑套组件305的顶部通过套环活动套在角度调节转辊302的外部,角度调节转辊302的外部活动安装有调节臂4,调节臂4的一侧开设有限位滑孔403,车厢底座1的顶部一侧固定安装有储液箱5,储液箱5的一侧固定安装有高压喷涂泵501,高压喷涂泵501的输出端安装有高压喷涂软管502,高压喷涂软管502与防飞溅型喷嘴402连接;
35.车厢底座1的顶部另一侧固定安装有主机组件6,主机组件6包括电源箱601、控制箱602、远程遥控电脑603、远程信号发射接收装置604和可拆卸式锂电池605,电源箱601的一侧固定安装有控制箱602,控制箱602的内部一侧固定安装有远程遥控电脑603,主机组件6的内部一侧固定安装有远程信号发射接收装置604,车厢底座1的顶部后端一侧固定安装有安装杆一7,车厢底座1的顶部后端另一侧固定安装有安装杆二8,车厢底座1的顶部两侧固定安装有两组侧边架9,侧边架9的顶部固定安装有限位栏901,且限位栏901的外部套有海绵套902。
36.需要说明的是:三维结构光成像摄像头801是一种结构光成像系统,能对屋面进行扫描,形成点云数据,利用远程遥控电脑603对三维结构光成像摄像头801实时反馈的数据进行处理,并对点云数据进行智能分析处理,加以ai算法、机器人路径自动规划、自动防碰撞等智能化技术,计算出当前屋面实时空间坐标,并引导机器人完成自动喷涂任务,中低速无刷电机102采用24v,48v或60v直流可拆卸式锂电池605供电,可拆卸式锂电池605可通过电源箱601进行快速拆卸更换,并设置有光伏板701,在晴朗天气施工可增加续航并节能环保,利用驱动器101与中低速无刷电机102的组合是一种典型的机电一体化产品,具备输出转速低,扭矩大、传动精度高、噪声低等特点,高压喷涂泵501是装置组成装置超高压喷涂系统的重要部件,利用高压喷涂泵501的通电运行可对储液箱5内部储存的水性或油性涂料抽出,通过防飞溅型喷嘴402可对水性或油性涂料进行喷涂,远程信号发射接收装置604采用2.4ghz即2400兆赫左右的高频段,抗干扰能力强并且信号传输距离也远,有效控制范围为半径百米甚至千米的任何方位且不受障碍物的影响,操作人员只需携带轻巧的发射器,自由走动并选择最佳或安全的视觉位置实行操作,清除以往由于视线不清、线控束缚、环境恶劣或指挥配合不当等因素造成的事故隐患,既保证了安全操作又大幅度提高了生产效率。
37.实施例二
38.请参阅图1-8本发明提出的一种屋面自动喷涂翻新机器人,相较于实施例一,本实施例还包括:车厢底座1的正面固定安装有检修门一103,检修门一103的正面两侧固定安装有两组距离感应器104,且距离感应器104通过导线与远程遥控电脑603电性连接,利用检修门一103可对车厢底座1内部电气设备进行安全保护,利用距离感应器104的通电运行可在装置移动时能对周围障碍物进行探测,并将探测信息传输给远程遥控电脑603,利用远程遥控电脑603可对距离感应器104采集的障碍信息进行智能分析处理,并加以ai算法,使装置能进行自动避障,提高装置移动时的安全性,皮带轮驱动组件2包括传动轮201、限位轮202、履带203,传动轮201的外部环绕安装有履带203,传动轮201之间等距安装有限位轮202,且传动轮201与中低速无刷电机102的输出端传动连接,中低速无刷电机102的通电运行可带动传动轮201旋转,利用传动轮201的旋转可带动履带203旋转,而限位轮202在伺服电机二303旋转运行过程中可提高履带203运行时的稳定性,通过两组履带203的旋转可便于装置进行移动,以便装置稳定的移动到指定位置,调节臂4的顶部一侧固定安装有倾角传感器401,倾角传感器401通过导线与远程遥控电脑603电性连接,调节臂4一端的顶部与底部固
定安装有两组防飞溅型喷嘴402,且防飞溅型喷嘴402与高压喷涂软管502的一端连接,利用倾角传感器401可对调节臂4的倾倒角度进行监测,并将调节臂4的倾倒数据通过导线输送至远程遥控电脑603,以便远程遥控电脑603采集调节臂4的运行信息,方便装置计算出当前喷涂状态,以便更好的进行喷涂作业,防飞溅型喷嘴402可对水性或油性涂料进行喷涂,高压喷涂泵501抽取的水性或油性涂料可通过高压喷涂软管502输送至防飞溅型喷嘴402,而防飞溅型喷嘴402采用防飞溅型号,能使得装置在喷涂作业中漆料浪费小,环境污染较低,提升装置的使用体验,高压喷涂泵501的输出端通过管道与储液箱5连接,且储液箱5的顶部安装有注液口,通过注液口可便于将外部水性或油性涂料注入储液箱5的内部,利用储液箱5可对各种水性或油性涂料进行储存,高压喷涂泵501是装置组成装置超高压喷涂系统的重要部件,利用高压喷涂泵501的通电运行可对储液箱5内部储存的水性或油性涂料抽出,可为装置喷涂作业提供运行动能,电源箱601的内部安装有可拆卸式锂电池605,且可拆卸式锂电池605与远程信号发射接收装置604、远程遥控电脑603、伺服电机一301、伺服电机二303、驱动器101、中低速无刷电机102电性连接,通过可拆卸式锂电池605与远程信号发射接收装置604、远程遥控电脑603、伺服电机一301、伺服电机二303、驱动器101、中低速无刷电机102的电性连接,可通过可拆卸式锂电池605对装置内部各类电气设备进行控制使用,安装杆一7的顶部固定安装有光伏板701,且光伏板701通过导线与可拆卸式锂电池605电性连接,利用光伏板701可进行光电转换,采用现有光伏技术,利用光伏板701可以将光能转换为电能,并将电能通过导线输送至可拆卸式锂电池605,利用可拆卸式锂电池605可对电量进行储存,利用光伏板701可在装置使用在晴朗天气施工时来增加装置续航并提高装置的节能环保性,安装杆二8的顶部固定安装有三维结构光成像摄像头801,且三维结构光成像摄像头801通过导线与远程遥控电脑603电性连接,利用高速的三维结构光成像摄像头801成像系统,对屋面进行扫描,形成点云数据,并将数据实时反馈给远程遥控电脑603,以便对三维结构光成像摄像头801的点云数据进行智能分析处理,方便装置计算出当前屋面实时空间坐标,并引导机器人完成自动喷涂任务。
39.工作原理:使用时可将装置移动到指定位置,利用可拆卸式锂电池605可为装置内部各类电气设备进行供电,此时启动三维结构光成像摄像头801,利用高速的三维结构光成像摄像头801成像系统,对屋面进行扫描,形成点云数据,并将数据实时反馈给远程遥控电脑603,利用远程遥控电脑603对三维结构光成像摄像头801的点云数据进行智能分析处理,加以ai算法、进行机器人路径自动规划、自动防碰撞等智能化技术,计算出当前屋面实时空间坐标,为引导机器人完成自动喷涂任务做好准备,并将信息通过远程信号发射接收装置604远程发送给操作人员,操作人员只需携带轻巧的外置发射器,通过远程信号发射接收装置604向远程遥控电脑603发送控制指令,实现远程无线遥控,无线遥控的原理就是工作人员使用外置的发射器把控制的电信号先编码,无线调频、调幅,转换成无线信号发送进来,远程信号发射接收装置604收到载有信息的无线电波接收,放大,解码,得到原先的控制电信号,把这个电信号再进行功率放大通过远程遥控电脑603用来驱动中低速无刷电机102以及装置内部其他电气设备,实现无线的遥控,而储液箱5可对各种水性或油性涂料进行储存,高压喷涂泵501是装置组成装置超高压喷涂系统的重要部件,利用高压喷涂泵501的通电运行可对储液箱5内部储存的水性或油性涂料抽出,通过高压喷涂软管502输送至防飞溅型喷嘴402,利用防飞溅型喷嘴402可对水性或油性涂料进行喷涂,需要调节防飞溅型喷嘴
402的喷涂角度时,利用伺服电机一301的通电运行可带动角度调节转辊302旋转,在角度调节转辊302与限位滑孔403的作用下可使得调节臂4围绕角度调节转辊302旋转,从而调整防飞溅型喷嘴402的喷涂角度,需要防飞溅型喷嘴402往复喷涂时,利用角度调节转辊302的正逆旋转可带动丝杆304正逆旋转,丝杆304旋转时会使螺纹滑套组件305在丝杆304的外部进行移动,通过螺纹滑套组件305的移动可带动调节臂4在角度调节转辊302的外部平移,从而实现往复喷涂,以此实现装置左右或上下的移动,装置整体需要进行移动时,利用驱动器101与中低速无刷电机102的配合可带动皮带轮驱动组件2运行,而两组中低速无刷电机102可分别对两侧的皮带轮驱动组件2进行驱动,通过配合可便于装置整体进行转向,为现有转向技术。
40.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1