一种多功能废旧建筑破拆机器人及破拆方法与流程
1.本发明涉及建筑工程领域,具体涉及一种多功能废旧建筑破拆机器人,同时,还涉及一种多功能废旧建筑破拆方法。
背景技术:
2.城市更新过程中、对废旧建筑拆除改造是一项重要工作,目前建筑拆除工作多采用机械和人工的方式进行,这种方式效率低,危险大,伴随大量粉尘、噪音,对劳动者工作十分不利,还存在安全隐患。与此同时,部分救灾救援工作中,也有建筑拆除场景,而施救现场迫于形势,抢险人员和设备不得不处于十分危险的施救现场,特别是遇到剧毒,化学物质泄漏或放射性物质泄漏,施救现场更是险象环生,往往要付出惨重的代价。发明专利cn200510022502.5中公开了一种拆除机器人,利用可回转的液压拆除头对建筑物进行拆除,通过采用液压回转和液压拆除头机构相结合的形式实现对垂直墙面和地面进行挖凿,但是该装置的机械臂功能模块单一,使用情景受限,缺少对顶部天花板进行拆除,以及将地面上较大的墙块进行粉碎以便于搬运,铲运碎屑,回收砖块的功能,因此需要设计一种可代替工人,集拆除天花板和垂直墙面功能于一体,具有切块,铲除碎屑功能且拆除过程中对环境友好,不影响周围建筑的机器人。
技术实现要素:
3.为弥补上述技术的漏洞,本发明的目的在于提供了一种多功能废旧建筑破拆机器人,在拆除墙体的同时,又可将掉落地面上较大墙块进行粉碎处理,对碎屑进行铲除,以及对有回收利用价值的墙块进行分块处理,拆除墙体和铲除碎屑可同时进行,设置有三层功能模块,其中第一层旋转功能模块由推铲单元和碎块单元组成,可将掉落地面上较大墙块进行粉碎处理,并对齐铲除,第二层旋转功能模块由凿机机械臂,定点爆破机械臂,切割机机械臂,抓手机械臂组成,相互组合可对垂直墙面和天花板进行拆除,第三层为顶撑部分,可在拆除天花板墙面时提供支撑,每层功能模块都可单独使用,也可相互协作使用,有效增加了机器的功能,有利于应对不同情景,同时提高了砖块的资源利用率。
4.本发明的另一个目的在于提供了一种多功能废旧建筑破拆方法,可针对垂直墙面和天花板采用不同的方法拆除,将两种拆除方法集成于一体,有效提高了机器本身的利用率,提高了施工效率。
5.为进一步实现上述目的,本发明采用以下技术方案:一种多功能废旧建筑破拆机器人,包括底盘部分,所述底盘部分上依次安装有第一层旋转功能模块、第二层旋转功能模块和顶部支撑部分,其中,
6.所述第一层旋转功能模块包括安装于所述底盘部分上的第一层转盘单元以及对称安装于所述第一层转盘单元外周的两组碎块单元和两组推铲单元;
7.所述第二层旋转功能模块包括安装于所述底盘部分上的第二层转盘单元以及可拆卸安装于所述第二层转盘单元上的定点爆破机械臂、凿机机械臂、切割机机械臂、抓手机
械臂;
8.所述顶撑部分包括安装于所述底盘部分上的液压顶撑单元以及安装于所述液压顶撑单元上的顶撑支撑板单元。
9.可选地,所述底盘部分包括车斗和安装在所述车斗相对两侧的两个t形钢,两个所述t形钢分别与左履带和右履带连接。
10.可选地,所述碎块单元包括万向轮机构a和碎块机构,所述万向轮机构a包括车轮支撑板,所述车轮支撑板下端安装有万向轮a,在所述车轮支撑板上端安装有由碎块第一方管、碎块第二方管和碎块第三方管形成的两个三角形稳定件a,这两个三角形稳定件a上端通过铝板a和碎块第一圆管连接;
11.所述碎块机构包括锤板,所述锤板与双头螺栓连接,所述双头螺栓与碎块第二圆管连接,所述碎块第二圆管与碎块第一连杆连接,碎块第二连杆一端与所述碎块第一连杆连接,一端与电机的输出轴连接,所述电机安装在角钢上,所述角钢与钢板b连接;所述碎块第三方管上安装有电动推杆,所述电动推杆的输出轴与角钢连接。
12.进一步地,所述锤板包括钢板a和安装于所述钢板a一端面的榔头,所述钢板a通过螺母与双头螺栓连接。
13.可选地,所述第一层转盘单元包括安装于车斗上的转盘支撑板、转动安装于所述转盘支撑板上的转盘a以及用于驱动转盘a转动的齿轮电机,所述转盘支撑板包括第一铁板、安装于所述第一铁板内的两块u形支撑铁板和环形轴承,所述转盘a包括第二铁板、安装于所述第二铁板上的齿圈以及雕刻在所述第二铁板上的凹槽。
14.可选地,所述推铲单元包括万向轮机构b和推铲机构,所述万向轮机构b包括推铲车车轮支撑板,所述推铲车车轮支撑板下端安装有万向轮b,所述推铲车车轮支撑板上端安装有由推铲第一方管、推铲第二方管和推铲第三方管焊接形成三角形稳定件b,这两三角形稳定件b上端通过铝板b和推铲第一固定圆管连接,推铲油泵通过油泵支撑板安装在推铲第二支撑方管上;
15.所述推铲机构包括推铲和用于安装所述推铲的旋转杆,所述旋转杆穿过推铲第一连杆与推铲舵机的输出轴连接,所述推铲第一连杆嵌套在在推铲第一固定圆管上;所述推铲第三方管上安装有推铲第一固定圆管和推铲第二固定圆管,所述推铲与油缸中的油缸柱塞连接。
16.可选地,所述第二层转盘单元包括安装于车斗内部的电机支撑桌,所述电机支撑桌上安装有转盘电机,所述转盘电机的输出轴上安装有转盘b,所述转盘b上端均匀安装有四个卡槽底座,所述卡槽底座用于定点爆破机械臂、凿机机械臂、切割机机械臂、抓手机械臂可拆卸连接。
17.可选地,所述液压顶撑单元包括安装于车斗内的顶撑油泵、第一液压同步分流阀和第二液压同步分流阀,所述第一油管和第二油管一端与顶撑油泵连接,另一端分别与所述第一液压同步分流阀和第二液压同步分流阀连接。
18.可选地,所述顶撑支撑板单元包括套在所述液压顶撑单元中的顶撑油缸上的顶撑支撑板,所述顶撑支撑板上安装有电钻支撑板,所述电钻支撑板上安装有可伸缩电钻。
19.相应的,本发明还要求保护一种多功能废旧建筑破拆方法,包括:
20.在拆除楼房天花板时,通过控制顶撑油缸的伸缩,使顶撑部分撑住天花板,控制顶
撑部分中的可伸缩钻头钻入天花板墙体内,扣住墙体,通过控制切割机机械臂中的舵机使切割机向上伸展,实现第二层旋转功能模块中的切割机机械臂对天花板四周进行切割,使天花板与四周的横梁失去关联,顶撑部分通过顶撑油缸动作伸长油缸柱塞,将墙面向上撑起完成对天花板墙体的拆除,在切割同时,通过控制推铲油缸的伸缩,使碎屑被铲入推铲,实现第一层旋转功能模块中的推铲单元对切割过程中掉落的碎屑进行铲除,通过控制推铲舵机调整推铲旋转的角度,推铲单元将碎屑倒入废料处理车,在处理地面上较大的墙块时,推铲单元和碎块单元协同使用,碎块单元一边将墙块粉碎,推铲单元则一边将碎屑铲除;
21.在处理拆除后的天花板墙体时,底盘部分中的履带将推铲单元中的碎屑和被顶撑部分的可伸缩电钻扣住的墙面运到指定地点,在运输和推铲单元倒泻碎屑过程中,收缩顶撑油缸,降低顶撑支撑板高度,通过控制切割机机械臂中的切割机舵机使切割机向下朝向顶撑支撑板上的墙块,通过旋转转盘b以及微调切割机舵机,使墙块切除直线形裂缝,实现第二旋转单元功能模块中的切割机机械臂对顶撑支撑板上的墙面的切割分块处理,同时通过控制抓手机械臂中的抓手第二舵机实现对墙块的抓取,通过控制机械臂上的舵机实现抓手机械臂的弯曲,对墙块搬运,并在指定地点码放整齐;
22.当拆除垂直墙面时,通过控制凿机机械臂中的凿机舵机调整电钻的位置,使第二旋转功能模块中的凿机机械臂在垂直墙面四周指定位置凿洞,凿洞完成后,转动第二旋转功能模块,使得定点爆破机械臂面向墙面,再由定点爆破机械臂中的爆破爪伸入洞口,通过爆破爪油缸作动,推动爆破爪瞬间张开,对洞口四周进行爆破,依次在每个洞口进行爆破;当遇到钢筋时,转动第二旋转功能模块,使得切割机机械臂面向墙壁,使用切割机机械臂将其切断,直至墙面四周完全断裂,若墙面仍未倒塌,使用推铲单元中推铲的底部对准墙面,启动机器人向前移动,将其进行推倒;
23.处理地面墙体碎屑时,第一旋转功能模块中的碎块单元将掉落地面上体积较大的墙块进行破碎,再由第一层转盘单元旋转90度,使推铲单元代替之前碎块单元的位置,对破碎后的墙块进行铲除,再由第一层转盘单元旋转90度,碎块单元代替之前的推铲单元位置,对剩余的墙块继续进行粉碎,而推铲单元将推铲内的碎屑倒入废料处理车内,如此往复直至墙块全部粉碎并铲除;
24.当仅需处理其中一个流程时,根据具体需求更换推铲单元和碎块单元,当仅需要将墙块粉碎时,将推铲单元更换成碎块单元,四个碎块单元同时对机器人四周的墙块进行粉碎;当仅需要对地面上的碎屑进行铲除时,将碎块单元更换成推铲单元,四个推铲单元同时对机器人四周的碎屑进行铲除;当仅需切割天花板时,将第二层旋转功能模块中的四个机械臂全部更换成切割机机械臂,四个切割机机械臂同时对天花板四边进行切割;当需要搬运大型墙块时,将四个机械臂全部更换成抓手机械臂,四个抓手机械臂同时对四周墙块进行搬运。
25.由上,通过顶撑部分和切割机机械臂的配合可对天花板墙面进行拆除,通过凿机机械臂,定点爆破机械臂和切割机机械臂可对垂直墙面进行拆除,通过推铲单元和碎块单元的配合可对墙块进行破碎并铲除,将针对垂直墙面和天花板两种拆除方法以及碎块和铲除配合的方法集成于一体,有效提高了机器本身的利用率,提高了施工效率。
26.与现有技术相比,本发明至少具备以下有益效果:
27.1、现有的拆除机只有一个电钻机械臂或一个抓手机械臂,且现有技术机械臂的自
由度受限,缺少能切割墙壁中钢筋的机械臂以及能正面拆除天花板的机构,在拆除完后,现有装置缺少能铲除阻碍装置前进的碎屑,因此现有装置适用场景受限,本发明则降低了装置的使用局限性,且使用过程中各机构的配合也有利于提高施工效率;通过顶撑部分和第二层旋转功能模块中的切割机机械臂的协作可对天花板墙面进行拆除,通过第二层旋转功能模块的凿机机械臂,定点爆破机械臂和切割机机械臂可对垂直墙面进行拆除,通过第一层旋转功能模块中的碎块单元可对不便于搬运的墙块进行粉碎,其中的推铲单元可铲除碎屑,因而可应对不同的场景,第二层旋转功能模块中设置了便于拆卸的卡槽底盘,有利于延拓其他功能模块,使该机器人可应用于更多的场景;其中设置的转盘有利于调整各个机械臂的位置,使装置更灵活。
28.2、在拆除建筑物过程中,掉落的碎屑容易阻碍装置的前进,而现有的拆除装置只设有拆除机构,缺少将较大的墙块粉碎并将碎屑铲除的碎块单元和推铲单元,本发明中的推铲单元和碎块单元呈对称形式安装在转盘上的机构,有利于调整两者的位置,在切割天花板墙体时,推铲单元可将碎屑铲除并倒入废料处理车,在处理地面上较大的墙块时,推铲单元和碎块单元可协同使用,碎块单元一边将墙块粉碎,推铲单元则将碎屑铲除,这种循环往复式清理方式有效提高了效率;同时当推铲单元和碎块单元不使用时可调整推铲单元中的推铲和碎块单元中的锤板着地作为装置的辅助支撑,提高了装置的稳定性。
29.3、待拆除的建筑物中有些墙面可通过切割分块进行回收利用,而在现有的拆除装置往往缺少可对墙面进行分块处理的机构,此外有些工地为了提高爆破效率,往往采用炸药爆破,但施工过程中会产生污染气体,且容易造成人员伤害;本发明采用顶撑部分和切割机配合的方法将天花板整面拆除的方法提高了拆除效率,在卸下顶撑部分上的墙面时,采用切割机进行分块处理,既有利于墙块的卸下,又有利于砖块的回收利用;顶撑部分采用可伸缩钻头使四个钻头像爪子一样抓住墙块,使墙块在被拆除过程中不会滑落,减少事故的发生;定点爆破机械臂通过油缸柱塞伸长使爆破爪张开实现爆破,在拥有同样的爆破速度前提下,免除了炸药爆破带来的气体污染和安全隐患。
30.4、现有的拆除机器人中设置的破拆功能较为单一且固定,例如当某些功能模块在该场景用不上时,相当于占用了装置空闲的位置,本发明中设置的第一层旋转功能模块中推铲单元和碎块单元以及第二层旋转功能模块中的定点爆破机械臂、凿机机械臂、抓手机械臂、切割机机械臂都是独立且可更换的。由于推铲单元和碎块单元都是通过螺栓螺母安装在转盘a上,当仅需要将墙块粉碎时,可将推铲单元更换成碎块单元,四个碎块单元可同时对装置四周的墙块进行粉碎;当仅需要对地面上的碎屑进行铲除时,可将碎块单元更换成推铲单元,四个推铲单元可同时对装置四周的碎屑进行铲除;当仅需切割天花板时,可将第二层旋转功能模块中的四个机械臂全部更换成切割机机械臂,四个切割机机械臂可同时对天花板四边进行切割;当需要搬运大型墙块时,可将四个机械臂全部更换成抓手机械臂,四个抓手机械臂可同时对四周墙块进行搬运;这种可根据实际情况来设置功能模块配比的机构有利于提高工作效率,加快施工进度,使装置更加灵活。
附图说明
31.此处所说明的附图用来提供对本技术的进一步理解,构成本技术的一部分,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
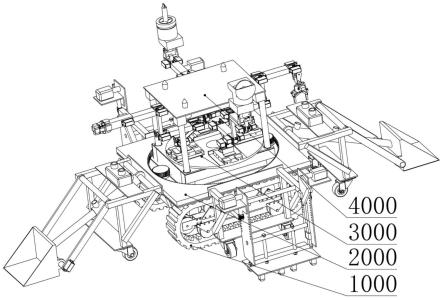
32.图1为本发明整体结构示意图;
33.图2为本发明底盘部分示意图;
34.图3为本发明第一层旋转功能模块示意图;
35.图4为第一层旋转功能模块的碎块单元一视角示意图;
36.图5为第一层旋转功能模块的碎块单元另一视角示意图;
37.图6为碎砖单元的锤板示意图;
38.图7为第一层旋转功能模块的转盘单元示意图;
39.图8为第一层转盘单元的转盘支撑板示意图;
40.图9为第一层转盘单元的转盘示意图;
41.图10为第一层旋转功能模块的推铲单元一视角示意图;
42.图11为第一层旋转功能模块的推铲单元另一视角示意图;
43.图12为本发明第二层旋转功能模块示意图;
44.图13为第二层旋转功能模块的转盘单元示意图;
45.图14为第二层旋转功能模块的定点爆破机械臂示意图;
46.图15为定点爆破机械臂的爆破爪示意图;
47.图16为第二层旋转功能模块的凿机机械臂示意图;
48.图17为第二层旋转功能模块的切割机机械臂示意图;
49.图18为第二层旋转功能模块的抓手机械臂示意图;
50.图19为本发明顶撑部分示意图;
51.图20为顶撑部分的液压顶撑单元示意图;
52.图21为顶撑部分的顶撑支撑板单元示意图。
53.附图标记说明:
54.1000-底盘部分:
55.1001-左履带;1002-t形钢;1003-车斗;1004-右履带;
56.2000-第一层旋转功能模块:
57.2100-碎块单元;2101-万向轮a;2102-车轮支撑板;2103-碎块第一支撑方管;2104-碎块第二支撑方管;2105-碎块第三支撑方管;2106-铝板a;2107-碎块第一圆管;2108-锤板;2108a-钢板a;2108b-榔头;2108c-螺母;2109-碎块第二圆管;2110-双头螺栓;2111-碎块第一连杆;2112-碎块第二连杆;2113-角钢;2114-电机;2115-电动推杆,2116-电动锁扣,2117-钢板b;
58.2200-第一层转盘单元;2201-转盘支撑板;2201a-第一铁板;2201b-u形支撑铁板;2201c-环形轴承;2201d-弧形槽口;2202-转盘a;2202a-第二铁板;2202b-凹槽;2202c-齿圈;2203-齿轮电机;
59.2300-推铲单元;2301-万向轮b;2302-推铲车车轮支撑板;2303-推铲第一支撑方管;2304-推铲第二支撑方管;2305-推铲第三支撑方管;2306-油泵支撑板;2307-推铲油泵;2308-铝板b;2309-推铲;2310-推铲舵机;2311-旋转杆;2312-推铲第一连杆;2313-推铲第一固定圆管;2314-推铲第二固定圆管;2315-推铲油缸;
60.3000-第二层旋转功能模块:
61.3100-第二层转盘单元;3101-电机支撑桌;3102-转盘电机;3103-转盘b;3104-卡
槽底座;3105-卡槽;3106-卡槽固定孔;
62.3200-定点爆破机械臂;3201-底座更换架;3202-爆破爪油泵;3203-爆破第一舵机;3204-第一舵机固定板;3205-第一舵机转盘;3206-爆破第二舵机;3207-爆破第一连杆;3208-爆破第三舵机;3209-爆破第二连杆;3210-爆破第四舵机;3211-爆破第三连杆;3212-爆破第五舵机;3213-爆破爪油缸;3214-爆破爪;3214a-爆破爪第一关节;3214b-爆破爪第二关节;3214c-爆破爪第三关节;3214d-爆破爪第四关节;
63.3300-凿机机械臂;3301-底座;3302-凿机第一连杆;3303-凿机第二连杆;3304-凿机第三连杆;3305-凿机第四连杆;3306-凿机舵机;3307-舵机连杆;3308-电钻;
64.3400-切割机机械臂;3401-第一机械臂;3402-切割机舵机连杆;3403-切割机舵机;3404-切割机;
65.3500-抓手机械臂;3501-第二机械臂;3502-抓手舵机连杆;3503-抓手第一舵机;3504-舵机支撑板;3505-抓手第二舵机;3506-第一指关节;3507-第二指关节;
66.4000-顶撑部分:
67.4100-液压顶撑单元;4101-顶撑油泵;4102-第一油管;4103-第一液压同步分流阀;4104-第二油管;4105-第二液压同步分流阀;4106-顶撑油缸;
68.4200-顶撑支撑板单元;4201-电钻支撑板;4202-顶撑支撑板;4203-可伸缩电钻。
具体实施方式
69.为了便于本领域普通技术人员理解和实施本发明,下面结合附图及实施示例对本发明作进一步的详细描述,应当理解,此处所描述的实施示例仅用于说明和解释本发明,并不用于限定本发明。
70.一种多功能废旧建筑破拆机器人,由图1所示,从下至上依次由底盘部分1000、第一层旋转功能模块2000、第二层旋转功能模块3000和顶部支撑部分4000组成,其中:
71.第一层旋转功能模块2000中的转盘支撑板2201焊接在底盘部分1000中的车斗1003的外围,第二层旋转功能模块3000中的电机支撑桌3101焊接在底盘部分1000中的车斗1003内部,顶撑部分4000中的油泵4101和液压同步分流阀通过螺栓螺母固定在车斗1003内,四个油缸4106插入车斗1003的四根方管内;底盘部分1000通过设置车斗1003用以存放电池、油泵和电机,其中电池可给履带、第一层旋转功能模块2000和第二层旋转功能模块3000中的驱动电机以及顶撑部分4000中的油泵供电,油泵用于给顶撑部分4000提供支撑动力,驱动电机用于驱动第二层旋转功能模块3000转动;在拆除楼房天花板时,由顶撑部分4000撑住天花板,由第二层旋转功能模块3000中的切割机机械臂3400对天花板四周进行切割,使天花板与四周的横梁失去关联,从而落在顶撑支撑板4202上,在切割同时,第一层旋转功能模块2000中的推铲单元2300可对切割过程中掉落的碎屑进行铲除,等到破拆机将天花板拆除后,底盘部分1000中的履带可将推铲单元2300中的碎屑和顶撑部分4000上的墙面运到指定地点,在运输过程和推铲单元2300倒泻碎屑时,第二旋转单元功能模块3000中的切割机机械臂3400可对顶撑支撑板4202上的墙面进行切割分块处理,这样有利于砖块的回收利用和便于卸下,同时抓手机械臂3500可对切好的墙块进行抓取并在指定地点码放整齐;当拆除垂直墙面时,由第二旋转功能模块3000中的凿机机械臂3300和定点爆破机械臂3200进行爆破拆除,第一旋转功能模块2000中的碎块单元2100可将体积较大的墙块进行破
碎,同时推铲单元2300可对破碎后的墙块进行铲除。现有装置往往只有一个机械臂机构,后者采用人工抡铁锤,使用笨重,效率低下,环境污染大;相较于现有装置,本发明实现了针对拆除不同位置墙面的多功能集合,其中设置天花板整面拆除,铲除碎屑和切割天花板的同时协作,分块、运输和卸砖的同时协作,碎块和铲除碎块的同时协作,呈对称形式的推铲单元2300和碎砖单元2100同时协作有利于提高效率,切割机可对墙面进行分块处理,有利于砖块的回收利用,减少了资源浪费,整体机械机构比较集成,可进入电梯,便于运输机器人,在拆除墙面过程中,从上往下拆除,相比于现有的爆破拆除,可周围的建筑物和居民生活几乎无影响。
72.由图2所示,底盘部分1000由左履带1001、t形钢1002、车斗1003、右履带1004组成;车斗1003整体由铁板、方管、铁片焊接组成,两个t形钢1002一端与车斗1003焊接,另一端分别与左履带1001和右履带1004焊接。
73.由图3所示,第一层旋转功能模块2000由碎块单元2100、第一层转盘单元2200和推铲单元2300组成,两个碎块单元2100通过铝板a2106与转盘a2202对称用螺栓螺母固定安装,两个推铲单元2300通过铝板b2308与转盘a2202对称用螺栓螺母固定安装;两个推铲单元2300对称安装既有利于装置的平衡性,又能同时对装置两侧的碎屑进行铲除,增加铲运容量和提高铲运效率;两个碎块单元2100对称安装可同时对装置两侧的砖块进行粉碎,提高了粉碎效率;当使用第二层旋转功能模块3000或顶撑部分4000时,推铲单元2300和碎块单元2100可起到辅助支撑的作用,提高装置的稳定性;第一层旋转功能模块2000整体配合使用时,由碎块单元2100先将装置前面的墙块粉碎一部分,再由第一层转盘单元2200旋转90度,使推铲单元2300代替之前碎块单元2100的位置对碎砖进行铲除,再由第一层转盘单元2200旋转90度,碎块单元2100代替之前推铲单元2300的位置,而此时推铲单元2300可将推铲2309中的碎屑倒入一旁的废料车内。
74.由图4、图5所示,碎块单元2100由左侧的万向轮机构a和右侧的碎块机构组成,万向轮机构a由万向轮a2101、车轮支撑板2102、碎块第一支撑方管2103、碎块第二支撑方管2104、碎块第三支撑方管2105、铝板a2106、碎块第一圆管2107组成,两个万向轮a2101通过螺栓螺母与车轮支撑板2102连接,碎块第一方管2103、碎块第二方管2104和碎块第三方管2105焊接形成三角形稳定件a,铝板a2106和碎块第一圆管2107将两个三角形稳定件a连接,两个三角形稳定件下端焊接在车轮支撑板2102上;碎块机构由锤板2108、碎块第二圆管2109、双头螺栓2110、碎块第一连杆2111、碎块第二连杆2112、角钢2113、电机2114、电动推杆2115、电动锁扣2116、钢板b2117组成,锤板2108通过螺母固定在双头螺栓2110上,双头螺栓2110与碎块第二圆管2109连接,碎块第二圆管2109通过螺母与碎块第一连杆2111连接,碎块第二连杆2112一端与碎块第一连杆2111连接,一端与电机2114的输出轴连接,电机2114固定在角钢2113上,角钢2113通过螺栓螺母与两侧的长方形的钢板b2117连接,电动推杆2115固定在碎块第三方管2105上,其输出轴与角钢2113连接,电动锁扣2116与碎块第三方管2105连接;在碎块单元2100左侧安装万向轮机构有利于支撑碎块单元2100,同时,可以辅助第一层旋转功能模块2000的转向;锤板2108通过碎块第一连杆2111和碎块第二连杆2112与电机2114连接,其机构可将电机的转动运动形式转化为锤板2108的上下运动形式,可使锤板2108反复捶打墙块,通过调节电机2114的速度可调节锤板2108的捶打速度;电动推杆2115的输出轴与角钢2113相连,便于根据墙块的高度来调节锤板2108的高度;在锤板
2108高度调节完后,电动锁扣2116相当于小型电动推杆,可伸出圆柱形锁扣穿入钢板b2117中的圆孔,扣住钢板b2117,其操作可通过单片机控制,与步进电机协同固定支撑碎块单元2100。
75.由图6所示,锤板2108为异形件,由钢板a2108a、榔头2108b、螺母2108c组成;榔头2108b焊接固定在钢板a2108a上,榔头2108b的头部为球形,有利于砖块的破碎;螺母2108c与双头螺栓2110连接,将锤板2108固定。
76.由图7所示,第一层转盘单元2200由转盘支撑板2201、转盘a2202和齿轮电机2203组成,其中,转盘a2202位于转盘支撑板2201上端,转盘支撑板2201中的u形支撑铁板2201b与车斗1003焊接,转盘a2202具有的凹槽2202b与转盘支撑板2201上的环形轴承2201c榫卯,环形轴承2201c边缘有球形滚珠,可使转盘a2202在转盘支撑板2201上旋转,从而调节第一旋转功能模块2000中的推铲单元2300和碎块单元2100的位置;齿轮电机2203固定在车斗1003上,齿轮电机2203的输出轴与齿圈2202c啮合,可为转盘a2202的旋转提供动力。
77.由图7-图9所示,转盘支撑板2201包括第一铁板2201a、u形支撑铁板2201b、环形轴承2201c、弧形槽口2201d,两块u形支撑铁板2201b焊接在第一铁板2201a内侧,环形轴承2201c焊接在第一铁板2201a上,环形轴承2201c的两侧镶嵌球形滚珠,使转盘a2202可随滚珠的转动而转动,弧形槽口2201d开设在u型支撑铁板2201b上,面积略大于齿轮电机2203,有利于齿轮电机2203的安装;转盘a2202包括第二铁板2202a、凹槽2202b、齿圈2202c,齿圈2202c外围与第二铁板2202a焊接,第二铁板2202a上由雕刻机雕刻有凹槽2202b,凹槽2202b与环形轴承2201c榫卯,环形轴承2201c边缘有球形滚珠,可使转盘a2202在转盘支撑板2201上旋转。
78.由图10-图11所示,推铲单元2300由左侧的推铲机构和右侧的万向轮机构b组成,万向轮机构b由万向轮b2301、推铲车车轮支撑板2302、推铲第一支撑方管2303、推铲第二支撑方管2304、推铲第三支撑方管2305、油泵支撑板2306、推铲油泵2307、铝板b2308组成,两个万向轮b2301通过螺栓螺母与推铲车车轮支撑板2302连接,推铲第一方管2303、推铲第二方管2304和推铲第三方管2305焊接形成三角形稳定件b,铝板b2308和推铲第一固定圆管2313将两个三角形稳定件b连接,两个三角形稳定件下端焊接在推铲车轮支撑板2302上;推铲油泵2307通过油泵支撑板2306固定在推铲第二支撑方管2305上,可为推铲油缸2315提供动力;推铲机构由推铲2309、推铲舵机2310、旋转杆2311、推铲第一连杆2312、推铲第一固定圆管2313、推铲第二固定圆管2314、推铲油缸2315组成,推铲第一固定圆管2313和推铲第二固定圆管2314焊接在两侧的推铲第三方管2305上,旋转杆2311穿过推铲第一连杆2312与推铲舵机2310的输出轴连接,推铲第一连杆2312嵌套在在推铲第一固定圆管2313上,使得推铲第一连杆2312可绕推铲第一固定圆管2313转动,推铲2309与旋转杆2311焊接,推铲油缸2315中的油缸柱塞与推铲2309焊接,缸体尾部的铁环套在推铲第二固定圆管2314上;当需要铲除碎砖时,先使推铲2309正对碎屑堆,控制推铲油缸2315的收缩可使推铲2309降低高度,控制推铲舵机2310调整推铲2309底部与地面相平,此时有两种方式将碎屑物铲如推铲,一是控制车身向前移动,将推铲2309推入碎屑堆,控制推铲油缸2315伸长可抬升推铲2309,同时控制舵机使推铲2309向上收,推铲2309底部与地面呈一定夹角,该方法适用于铲除较大的碎屑堆;二是车身不动,控制推铲油缸2315伸长,控制推铲舵机2310微调推铲2309的角度,使推铲2309向前推,将碎屑铲入推铲2309,该方法适用于清理较少的碎屑堆,例如整块
切割天花板墙体时掉落的碎屑。
79.由图12所示,第二层旋转功能模块3000由底部的第二层转盘单元3100和位于其上的定点爆破机械臂3200、凿机机械臂3300、切割机机械臂3400、抓手机械臂3500组成,第二层转盘单元3100中的转盘b3103上设置了四个便于拆卸的卡槽底座3104,便于功能模块的更换;在拆除天花板墙面时,由顶撑部分4000撑住天花板,使用切割机机械臂3400将墙面四周切断,由推铲单元2300清理碎屑;在卸下顶撑部分4000上的墙块时,使用切割机机械臂3400将其切成块,切割同时,抓手机械臂3500可将切好的砖块卸下并码放整齐;在拆除垂直墙面时,使用凿机机械臂3300在墙面的相应位置钻出几个洞,旋转第二层转盘单元3100,使爆破机械臂3200代替之前凿机机械臂3300的位置,将爆破机械臂3200中的爆破爪3214伸入洞口内,通过油缸使爆破爪3214张开进行爆破,爆破完毕后,进行下一洞口爆破,直至墙体拆除,使用切割机机械臂3400将拆除过程中裸露的钢筋切断。现有的拆除装置只有一个电钻机械臂,或者抓手结构,无法应对复杂的情况,本发明将凿机,切割机,抓手,爆破爪四个功能模块集成于一体,可同时应对拆除天花板和垂直墙面,切割成可回收利用的砖块,转运砖块,爆破,钻洞,切钢筋这些情况;此外,相比于现有的炸药爆破,有利于降低炸伤风险,代替人工,效率更高,安全系数高,无污染气体释放,有利于保护环境,砖块的回收利用有利于节约资源。
80.由图13所示,第二层转盘单元3100由电机支撑桌3101、转盘电机3102、转盘b3103、卡槽底座3104、卡槽3105、卡槽固定孔3106组成,电机支撑桌3101焊接车斗1003内部,转盘电机3102通过螺栓螺母固定在电机支撑桌3101上,转盘b3103通过螺栓螺母固定在转盘电机3102的输出轴上,四个卡槽底座3104均匀焊接在转盘b3103上,卡槽底盘3104上具有的卡槽3105与机械臂中的底座更换架3201为可拆卸连接,可通过螺栓螺母穿过底座更换架3201和卡槽3105上的卡槽固定孔3106将底盘更换架3201固定在卡槽底座3104上;转盘电机3102可控制转盘b3103的旋转。
81.由图14所示,定点爆破机械臂3200由机械臂机构和爆破爪机构组成,机械臂机构由底座更换架3201、第一舵机3203、第一舵机固定板3204、第一舵机转盘3205、爆破第二舵机3206、爆破第一连杆3207、第三舵机3208、爆破第二连杆3209、爆破第四舵机3210、爆破第三连杆3211、爆破第五舵机3212组成,爆破爪机构由爆破爪油泵3202、爆破爪油缸3213、爆破爪3214组成,第一舵机固定板3204将爆破第一舵机3203固定在底座更换架3201上,第一舵机转盘3205与爆破第一舵机3203的输出轴连接,爆破第二舵机3206固定在第一舵机转盘3205上,爆破第一连杆3207一端与爆破第二舵机3206的输出轴连接,一端与爆破第三舵机3208连接,爆破第三舵机3208和爆破第四舵机3210分别固定在爆破第二连杆3209上,爆破第三连杆3211一端与爆破第四舵机3210的输出轴连接,一端与爆破第五舵机3212连接,爆破第五舵机3212固定在爆破爪油缸3213尾部,爆破爪3214固定在爆破爪油缸3213上;爆破爪油泵3202固定在第一舵机固定板3204上。当使用爆破爪爆破墙壁时,可控制爆破第四舵机3210和爆破第五舵机3212使机械臂向右下方收缩,使机械臂完全进入顶撑部分的投影面内,这样可以让第二层转盘单元3100转动时,机械臂不受顶撑部分4000中四根油缸柱塞的阻碍,将定点爆破机械臂3200旋转到指定位置后,爆破第一连杆3207向后倾斜,有利于平衡爆破爪3214和爆破油缸3213的重量,通过旋转转盘b3103可调整爆破爪3214水平方向的位置,通过旋转第一舵机转盘3205可调整爆破爪正对墙面,通过调整爆破第一连杆3207和爆
破第二连杆3209的夹角,可调整爆破爪3214竖直方向的位置,通过调整爆破第二连杆3209和爆破第三连杆3211的夹角,可调整爆破爪3214伸出的长度;将爆破爪按上述方法伸入洞口后,由爆破爪油泵3202为爆破爪油缸3213提供动力,可控制爆破爪油缸3213中的油缸柱塞,推动爆破爪3214的张开,油缸的力可达17至25吨,可实现墙壁的爆破。
82.由图15所示,爆破爪3214为异形件,由爆破爪第一关节3214a、爆破爪第二关节3214b、爆破爪第三关节3214c、爆破爪第四关节3214d组成;爆破爪第一关节3214a固定在爆破爪油缸3213上,爆破爪第四关节3214d一端与爆破爪油缸3213中的油缸柱塞连接,一端与爆破爪第三连杆3214c连接,爆破爪第二关节3214b一端与爆破爪第一关节3214a连接,一端与爆破爪第三关节3214c连接,油缸柱塞的伸长可使爆破爪张开,油缸柱塞的缩短可使爆破爪合拢。
83.由图16所示,凿机机械臂3300由凿机机构和机械臂机构组成,凿机机构通过凿机舵机3306与机械臂机构连接,机械臂机构由底座3301、凿机第一连杆3302、凿机第二连杆3303、凿机第三连杆3304、凿机第四连杆3305组成,凿机第一连杆3302、凿机第二连杆3303、凿机第三连杆3304以及凿机第四连杆3305通过舵机连接,底座3301通过螺栓螺母与底座更换架3201连接。凿机机构由凿机舵机3306、舵机连杆3307、电钻3308组成,舵机连杆3307与凿机舵机3306的输出轴连接,电钻3308固定在舵机连杆3307上,凿机舵机3306可控制凿机钻头的朝向,当舵机连杆3307与凿机第四连杆3305垂直时,可对天花板墙体进行凿洞,当两者在同一直线上时,可对垂直墙壁进行凿洞。
84.由图17所示,切割机机械臂3400由切割机机构和第一机械臂3401组成,切割机构由切割机舵机3403、切割机舵机连杆3402和切割机3404组成,切割机舵机3403固定在切割机舵机连杆3402上,切割机3404与切割机舵机3403的输出轴连接;第一机械臂3401中连杆和舵机的连接方式,功能和使用方法与定点爆破机械臂3200中的机械臂机构相同;切割机机械臂同样可以切割天花板和切割垂直墙壁,其调整方式与凿机机械臂3300中调整电钻3308的朝向相同,切割机舵机3403可控制切割的方向,在使用切割机机械臂3400切割顶撑部分4000上已切割下来的墙块时,调整切割机机械臂3400中的机械臂机构,使机械臂尽可能往外伸,同时降低顶撑部分4000的高度,调整切割机,使其朝向顶撑部分4000上的墙块,此时切割机舵机3403可控制切割机切出不同走向的裂缝,当需要切割顶撑部分4000上另一侧的墙块时,可先升高顶撑部分4000的高度,转动第二层旋转功能模块3000,使切割机机械臂3400到达指定位置,降低顶撑部分4000即可进行切割。
85.由图18所示,抓手机械臂3500由第二机械臂3501和抓手机构组成,第二机械臂3501的连接方式,功能和使用方法与定点爆破机械臂3200中的机械臂机构相同;抓手机构由抓手舵机连杆3502、抓手第一舵机3503、舵机支撑板3504、抓手第二舵机3505、第一指关节3506、第二指关节3507组成,抓手舵机连杆3502与第二机械臂3501中的舵机输出轴连接,抓手第一舵机3503固定在抓手舵机连杆3502上,舵机支撑板3504与抓手第一舵机3503的输出轴连接,抓手第二舵机3505固定在舵机支撑板3504上,抓手第二舵机3505的输出轴与第二指关节3507连接,第一指关节3506与第二指关节3507啮合,通过控制第二机械臂3501可调整抓手的朝向,其控制方式与定点爆破机械臂3200中控制爆破爪方向的方法相同,抓手第二舵机2505可控制第一指关节3506和第二指关节3507的张合。
86.由图19所示,顶撑部分4000由液压顶撑单元4100和顶撑支撑板单元4200组成,液
压顶撑单元4100通过顶撑油缸4106給顶撑支撑板单元4200提供动力,当液压柱塞向上伸展时,顶撑支撑板单元4200可撑住天花板,天花板被切断后,液压柱塞向下收缩,可降低顶撑支撑板单元4200的高度,便于切割机机械臂3400对墙块进行分块切割。相较于现有拆除装置,本装置可快速高效的拆除一整块墙面,对墙面进行分块处理有利于提高资源利用率。
87.由图20所示,液压顶撑单元4100由顶撑油泵4101、第一油管4102、第一液压同步分流阀4103、第二油管4104、第二液压同步分流阀4105、顶撑油缸4106组成;顶撑油泵4101、第一液压同步分流阀4103和第二液压同步分流阀4105通过螺栓螺母固定在车斗1003内,第一油管4102和第二油管4104一端与顶撑油泵4101连接,另一端分别与第一液压同步分流阀4103和第二液压同步分流阀4105连接,第一液压同步分流阀4103的四个管口通过油管分别与四个顶撑油缸4106下端的管口连接,控制下端液体的进出,第二液压同步分流阀4105的四个管口通过油管分别与四个顶撑油缸4106上端的管口连接,控制上端液体的进出,液压同步分流阀为通用件,其作用是使四个液压柱塞同时升降。
88.由图21所示,顶撑支撑板单元4200由电钻支撑板4201、顶撑支撑板4202、可伸缩电钻4203组成,顶撑支撑板4202四角具有的方管可套在液压顶撑单元4100中的顶撑油缸4106的液压柱塞上,电钻支撑板4201与顶撑支撑板4202焊接,用于固定四个可伸缩电钻4203;当顶撑支撑板4202与墙面接触时,四个伸缩电钻4203缓慢向上伸缩,当其钻入墙体后,四个可伸缩电钻4203就如同爪子一样抓住墙体,有利于切割机机械臂3400将天花板切断后,天花板可附在顶撑支撑板4202上而不会从支撑板上滑落,保证施工的安全。
89.相应的,本发明还提供了一种多功能废旧建筑破拆方法,包括:
90.在拆除楼房天花板时,通过控制顶撑油缸4106的伸缩,使顶撑部分4000撑住天花板,控制顶撑部分4000中的可伸缩钻头4203钻入天花板墙体内,便于扣住墙体,使切割过程更稳定,通过控制切割机机械臂3400中的舵机可使切割机3404向上伸展,实现第二层旋转功能模块3000中的切割机机械臂3400对天花板四周进行切割,使天花板与四周的横梁失去关联,顶撑部分4000即可通过顶撑油缸4106动作伸长油缸柱塞,将墙面向上撑起完成对天花板墙体的拆除,在切割同时,通过控制推铲油缸2315的伸缩,可使碎屑被铲入推铲2309,实现第一层旋转功能模块2000中的推铲单元2300对切割过程中掉落的碎屑进行铲除,通过控制推铲舵机2310可调整推铲2309旋转的角度,推铲单元2300可将碎屑倒入废料处理车,在处理地面上较大的墙块时,推铲单元2300和碎块单元2100可协同使用,碎块单元2100一边将墙块粉碎,推铲单元2300则一边将碎屑铲除;
91.在处理拆除后的天花板墙体时,底盘部分1000中的履带可将推铲单元2300中的碎屑和被顶撑部分4000的可伸缩电钻4203扣住的墙面运到指定地点,在运输和推铲单元2300倒泻碎屑过程中,收缩顶撑油缸4106,降低顶撑支撑板4202高度,通过控制切割机机械臂3400中的切割机舵机3403可使切割机3404向下朝向顶撑支撑板4202上的墙块,通过旋转转盘b3103以及微调切割机舵机3403,可使墙块切除直线形裂缝,实现第二旋转单元功能模块3000中的切割机机械臂3400对顶撑支撑板4202上的墙面的切割分块处理,这样有利于砖块的回收利用和便于卸下,同时通过控制抓手机械臂3500中的抓手第二舵机3505可实现对墙块的抓取,通过控制机械臂3501上的舵机可实现抓手机械臂3500的弯曲,即对墙块的搬运,并在指定地点码放整齐;
92.当拆除垂直墙面时,通过控制凿机机械臂3300中的凿机舵机3306可调整电钻3308
的位置,使第二旋转功能模块3000中的凿机机械臂3300在垂直墙面四周指定位置凿洞,凿洞完成后,可转动第二旋转功能模块3000,使得定点爆破机械臂3200面向墙面,再由定点爆破机械臂3200中的爆破爪3214伸入洞口,通过爆破爪油缸3213作动,推动爆破爪3214瞬间张开,可对洞口四周进行爆破,依次在每个洞口进行爆破,当遇到钢筋时,可转动第二旋转功能模块3000,使得切割机机械臂3400面向墙壁,使用切割机机械臂3200将其切断,直至墙面四周完全断裂,若墙面仍未倒塌,可使用推铲单元2300中推铲2309的底部对准墙面,启动机器人向前移动,将其进行推倒;
93.处理地面墙体碎屑时,第一旋转功能模块2000中的碎块单元2100可将掉落地面上体积较大的墙块进行破碎,再由第一层转盘单元2200旋转90度,使推铲单元2300代替之前碎块单元2100的位置,即可对破碎后的墙块进行铲除,再由第一层转盘单元2200旋转90度,碎块单元2100代替之前的推铲单元2300位置,可对剩余的墙块继续进行粉碎,而推铲单元2300则可将推铲内的碎屑倒入废料处理车内,如此往复直至墙块全部粉碎并铲除;
94.当仅需处理其中一个流程时,由于推铲单元2300和碎块单元2100都是通过螺栓螺母安装在转盘a2202上,可根据具体需求更换功能模块。当仅需要将墙块粉碎时,可将推铲单元2300更换成碎块单元2100,四个碎块单元2100可同时对机器人四周的墙块进行粉碎;当仅需要对地面上的碎屑进行铲除时,可将碎块单元2100更换成推铲单元2300,四个推铲单元2300可同时对机器人四周的碎屑进行铲除;当仅需切割天花板时,可将第二层旋转功能模块3000中的四个机械臂全部更换成切割机机械臂3400,四个切割机机械臂3400可同时对天花板四边进行切割;当需要搬运大型墙块时,可将四个机械臂全部更换成抓手机械臂3500,四个抓手机械臂3500可同时对四周墙块进行搬运。
95.以上所述,仅为本发明中的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉该技术的人在本发明所揭露的技术范围内,可理解得到的变换或者替换,都应该涵盖在本发明的包含范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1